Известны устройства для дистанционного уиравления орулчием, состоящие из приводимых осей, вращающихся синохроиио н синфазно от шунтовых двигателей постоянного тока, снабженных синхроиизирующи ми обмотками, якорными обмотками, подключенными параллельно источнику тока и синхронизирующими обмотками, включенными навстречу друг другу.
В предложенном устройстве, каждая приводимая ось, вращаемая синхронно и синфазно со скоростью, пропорциональной разности чисел оборотов, механически соединена через дифференциал с двумя двигателями, каждый из которых вращается синхронно с соответствующими ему двигателями других приводимых осей.
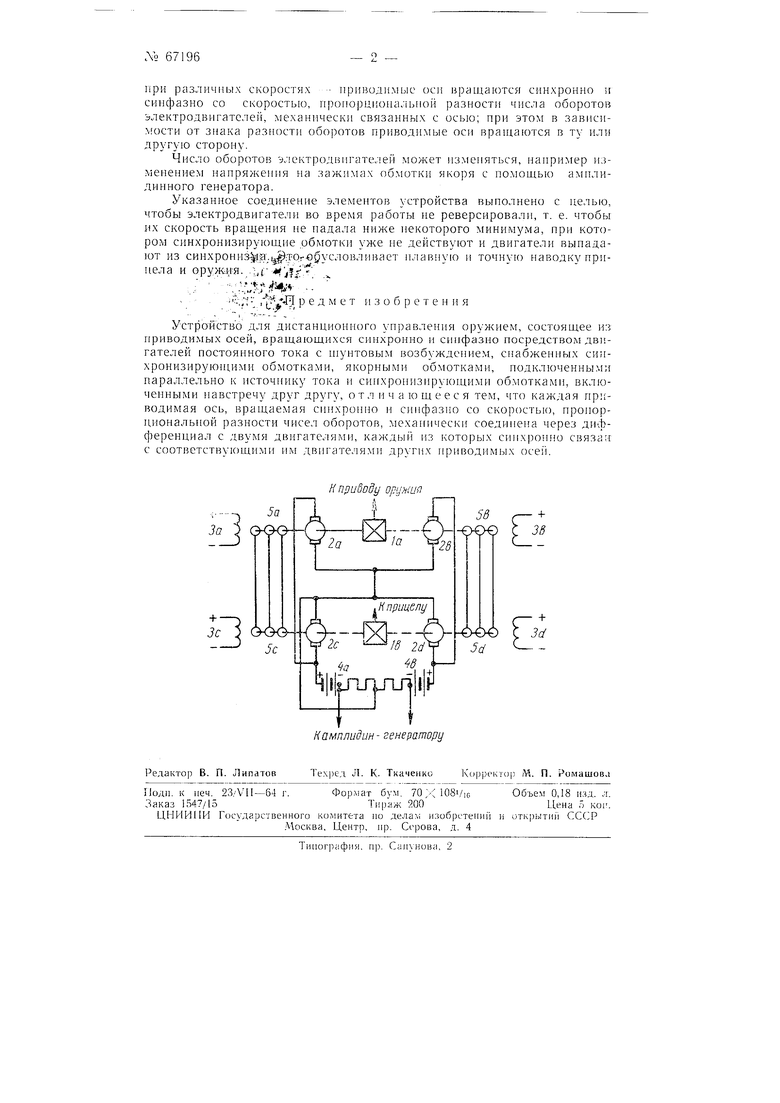
На чертеже схематически изображено предложенное устройство.
Обозначения; /а, 1в - дифференциалы; 2а, 2в, 2с. 2d - электродвигатели; За, Зв, 3с, 3d - обмотки возбуждения электродвигателе ; 4а, 4в - аккумуляторные батареи и 5а, 5в, 5с, 5d - кольца синхронизирующих обмоток электродвигателей.
Для осуществления синхронного и синфазного вращения прицела и оружия, удаленных друг от друга, каждая приводимая ось механически, через дифференциал, соединена с двумя электродвигателями. Якорная обмотка соответствующих электродвигателей приво.димой оси подключена параллельно к источнику тока, а их синхронизирующие обмотки включены встречно. Благодаря такому электрическому -соединению соответственные электродвигатели вращаются синхронно и синфазно.
Если предположить, например, что электродвигатели 2а и 2с вращаются с некоторой постоянной скоростью, а двигатели 2в 2d - с цеременной, тогда при равных, но обратных по направлению скоростях .вращения электродвигателей приводимые оси будут неподвил-сными, а