1
Изобретение относится к средствам загрузки полувагонов железнодорожного транспорта сыпучими материалами, в частности, к средствам контроля и управления технологическими процессами погрузки полезнь1Х ископаемых погрузочным оборудованием добычных роторных комплексов -повышенной производительности в полувагоны магистрального транспорта непосредственно в забое в процессе зкскаваиии.
Известно устройство для управления загрузкой сыпучего материала в железнодорожные полувагоны, содержащее измеритель интенсивности потока матернала, установленный на загрузочном конвейере и соединенный чертз переключатель с одним из блоком управЛення дозированием, состоящим из интегратора с узлом сброса, связанным своим входом с приводом узла коммутации загрузочной установки, дешифратора, и цифрового индикатора, подключенных к выходам интегратора узла задания до4ы и командоаппарата 11.
В известном устройстве отсутствует полуавтоматический и автоматический режим управления приводом затвора в момент достижения.
равенства количества материала в вагоне с его грузоподъемностью. Этот недостаток особенно проявляется при работе на роторных комплексах повышенной пронзводательностн.
Кроме того, весьма существенным недостатком известного устройства является наличие погрешностей в определении текущего количества материала в загружаемом полувагоне, связанных с-транспортным запаздыванием прохождеюи потока материала от места установки измерителя интенсивности потока до зоны коммутации потока и необходимость выполнения машинистом-оператором погрузки отдельной операции сфос регистра памяти и цифрового индикатора количества материала в загружаемом полувагоне с внесением при этом субъективной временной погрешности.
Цель изобретения - повышение производительности згирузки.
Это доспн ется тем, что в предлагаемом устройстве блок управлешы дозированием снабжен синхронной моделью движения потока с узлом настройки в функции расстояния между зонами (Измерения интенсивности потока и коммутаций
потока, вход которой подключен к выходу дешифратора, а выход - к приводу узла коммутации загрузочной установки, и узлом изменения структуры дешифратора, через который узел задания дозы связан с одним из входов дешифратора, при этом узел сброса соединен своим входом с приводом узла коммутации и выходом дешифратора через дополнительно . . введенный дифференцирующий злемент, а также тем, что синхронная модель движения потока выполнена в виде линии временной задержки.
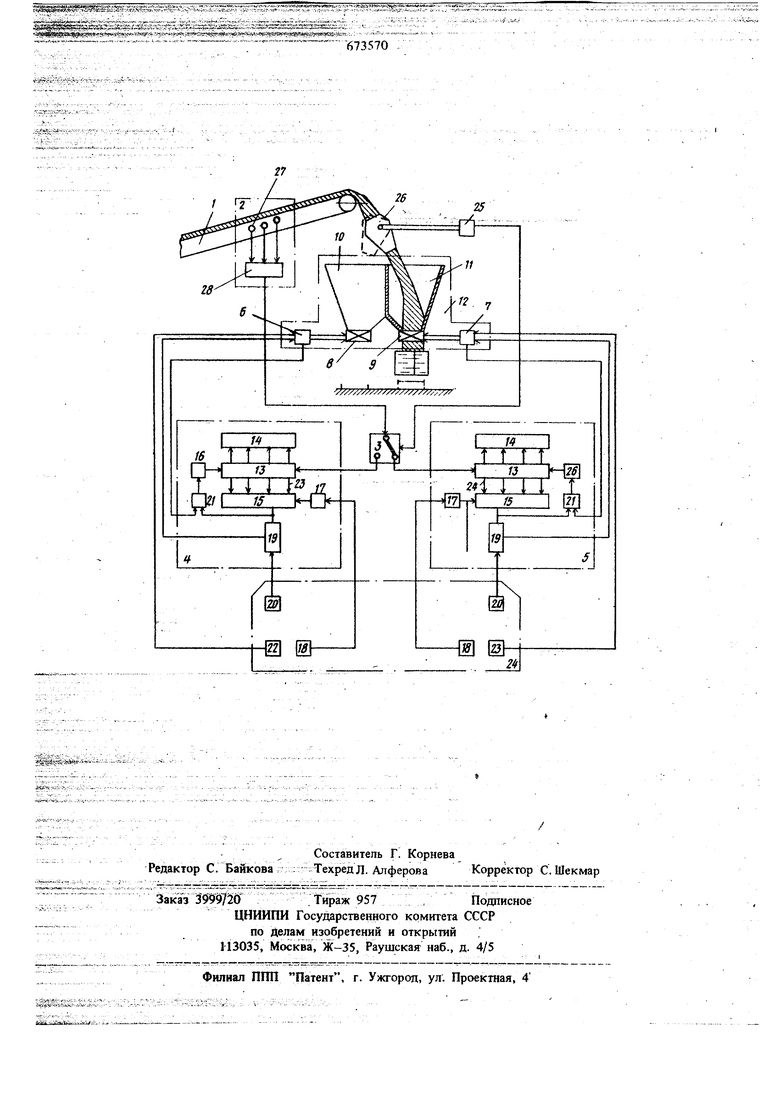
I На чертеже представлена функциональная схема устройства . . .
-Устройство содержит в себе установленный на загрузочном коявейере I измеритель 2 интенсивности потока материала, соединенный через переключатель 3 с блоками 4 и S управления дозированием,, подключенными своими выходами к приводам 6, 7 узлов 8, 9 коммутации бункеров 10, И загрузочной установки 12.
Каждый из блоков 4 и 5 содержит интегратор 13, выходы которого подключены. к Цифровому индакатору 14 и дешифратору 15, а входы - соответственно - к переключателю 3 и узлу 16 сброса.
К другому входу дешифратора 15 через узел 17 изменения структуры дешифратора подключе выход узла 18 задания дозы.
К выходу дешифратора 15 подаслйчена синхронная модель 19 движения noTOka с узлом 20 настройки ее в функции расстояния между зонами измерения интенсивности потока и коммутаiWH потока.,
Выход модели 19 является выходом блока 4 (5). -- / Узел 16 сброса соединен с приводом 6(7) узла 8(9) коммутации через дифференцирующий элемент 21.. ,Узлы 18 и 20, а также комшдоаппарат 22 и 23, связанные с приводами 6 и 7, установлены на пульте 24 в кабине машиниста-оператора.- ....
Управляющий вход переключателя 3 соеданен с датчиком 25 положения ная авляющего короб 26 загрузочной установки 12.
Измеритель 2 со ерткит первичные преобразователи 27 (измерители погонной нагрузки, скорости движения и угла наклон Ленты конвейера), соединенные со вторичным преобразователем 28 интенсивнсюти потбка в частотно-Щдулнрованный импульсный сигнал.
Синхронная модель 19 предназначена для устранения транспортного запаздывания прохождения потока материала от места установки из мерителя2 до тоны кЪм1| аа1Ш Т1ШШ1 узлйм 8(9) коммутации потока В простейшШ случае синхронная модель 19 выполнена в виде линии
временной задержки, постоянная времени которой задается узлом 20 настройки модели 19 в функции расстояния между зоной измерения интенсивности и зоной коммутации потока, которое может изменятся в пределах от 10 до 20 м.
Устройство работает следующим образом.
При работе добычного роторного экскаватора поток материала, например угля, проходит по загрузочному конвейеру 1 через направляющий короб 26, один из бункеров, например, бункер 11 и соответствующий узел 9 коммутации потока в за.гружаемый полувагон. При прохожд1еши потока материала через первичные преобразователи 27 измерителя 2 интенсивности потока параметры последнего преобразуются в Соответствующие первичные электрические сигналы, а затем во вторичном узле 28 в сигнал, соответствующий интенсивности цотока и имеющий форму частотно-модулированного импульсного сигнала. Указанный сигнал через переключатель 3, состояние которого отражает положение направляющего короба 26 и связанного с 1ШМ датчика 25 положения поступает в блок 5 управления дознрованием на вход интегратора 13. Текущее значение результата интегрирования представляется в виде показаний цифрового ийдикатора 14, отражающих количество материала, прощедщего с момента начала цикла интегрирования через зону размещения на конвейере 1 первичных преобразователей 27 измернтеля 2 интенсивности потока материала. После возрастания текущего значения результата ютгегрировани дискретного интегратора 13 до величинЬ, соответствующей состойнйю дешифратора 15, шределяемого узлом 17 изменения структурь дешифратора и узлом 18 задания дозы, т.е. до величины, соответствующей количеству материала, прощедшему через измеритель 2 интенсивности потока материала н равному величине задаваемой дозы, на выходе дешифратора 15 появляется импульсный сигнал. 3TOt сигнал поступает всинхронную модель 19. Благодаря действию синхронной модели 19 сигнал на закрытие узла 9 приходит с временной задержкой равной времени Прохождения отрезка материала от места установки измерителя 2 интенсивности йотока материала до зоны коммутащш потока злом 9. С выхода синхронной модели 19 управляющий сигнал поступает на привод 7 узла 9 коммутации потока, вследствие чего происхоЙИТ перекрытие потока И заканчивается загрузка полувагона. Одновременно выходной сигнал дешифратора 15 через дифференцирующий элемент 21 поступает в узел 16 сброса интегратора 13. РезуЛь ат интйр1чювания предыдущего цикла стирается и начинается интегрирование количества материала, поступающего в бункер И предназИаченного для погрузки в следующий
полувагон. При этом узел 9 коммутации пото- КЗ находится в закрытом состоянии в течение времени прохождения межвагонного промежутка при относительном перемещении вагонов и загрузочной устаиовки 12. Благодаря действию дифференцирующего элемента 2) даже при повыше 01ой производительности добычного роторного комплекса, т. е. при повышенной частоте частотно-модулированного импульсного сигнала, поступающего на вход интегратора 13, обеспечивается окончание предыдущего одкла интегрирования и начало следующего цикла интегрирования без внесения динамических погрешностей (без потери счетных импульсов). При этом в случае аварийного закрытия узла коммутации в ручном режиме управления аналогичным образом и также без потери информации производится окончание пре1ц 1дущего и начало следующего циклов интегрирования. В этом случае сигнал в узел 16 сброса через дифференцирующий элемент 21 поступает от привода 7 уэла 9 коммутации потока. При переходе на загрузку йолувагонов на ;фугом пути производится переключение направляющего короба 26 и переключателя 3. При этом в интеграторе 13 и на цифровом индикат(е 4 сохраняется результат интегрирования, отражающий количество материала, который накопился в бункере 11 за время загрузки последаего полувагона предыдущего состава. Благодаря таколр выполнению устройства исключаются зиаадтельные погрешности при пофузке первого полувагона состава, связанные с указанным выше накоплением материала в бункере. Загрузка полувагона на другом пути производится из бункера 10, а процесс управления погрузкой осуществляется блоком 4 управления дозированием.
Формула изобретения
I..1.Устройство для управления загрузкой сыпучего материала в железнодороядаые полувагоны, содержащее измеритель интенсивности потока материала, установленный на загрузочном конвейере и соединенный через переключатель с одним из блоков управления дозированием, состоящим из интегратора с узлом сброса, связанным своим входом с приводом узла комыутяции загрзочной установки, .дешифратора и цифрового индикатора, подключенй1 1Х к выходам интегратора, узла зйдайяя дозы и командоаппарата, о т л и ч а ю щ ее с я тем, что, с целью
повышения произйодктелыюсти загрузки, блок управления дозированием снабжен синхронней моделью даижения потока с узлом настройки в функции расстояния между зонамиизмерения интенсивности потока и коммутации потока,
вход которой подключен к выходу дешифратора, а выход - к приводу узла коммутации загрузочной установки, и узлом изменения структуры дешифратора, через который узел задания дозы связан с одним из входов шифратора,
при этом узел сброса соединен своим входом с приводом узла кдммутации и выходом дешифратора через дополнительно введенный дифференцирующий элемент.
2.Устройство по п, 1, о т л и ч а ю щ ее с я тем. Что синхронная модель даижения
потока выполнена в виде линии временной задержки.
Источники информации, принятые во внимаше |фи экспертизе
I. Авторское свидетельство СССР № 347264, кл. В 65 G 67/00, 30.06.70:
Ч.--,- .i tAl;ri,
..:
673570
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой сыпучих материалов в железнодорожные полувагоны | 1978 |
|
SU906873A1 |
| Устройство управления оборудованием для загрузки железнодорожных полувагонов | 1976 |
|
SU735536A1 |
| Устройство управления оборудованием для загрузки железнодорожных вагонов | 1988 |
|
SU1602787A1 |
| Устройство для погрузки сыпучих материалов в железнодорожные полувагоны | 1980 |
|
SU919964A2 |
| Дозатор сыпучих и кусковых материалов | 1983 |
|
SU1220429A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Устройство для погрузки сыпучего материала в состав железнодорожных полувагонов | 1980 |
|
SU943158A1 |
| Способ весового непрерывногодОзиРОВАНия СыпучиХ МАТЕРиАлОВ | 1979 |
|
SU815516A1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| УСТРОЙСТВО ДОЗИРОВАНИЯ УФ-ИЗЛУЧЕНИЯ ГАЗОРАЗРЯДНЫХ ЛАМП | 2005 |
|
RU2304007C2 |
4%5«л; ----25
