(54) МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ
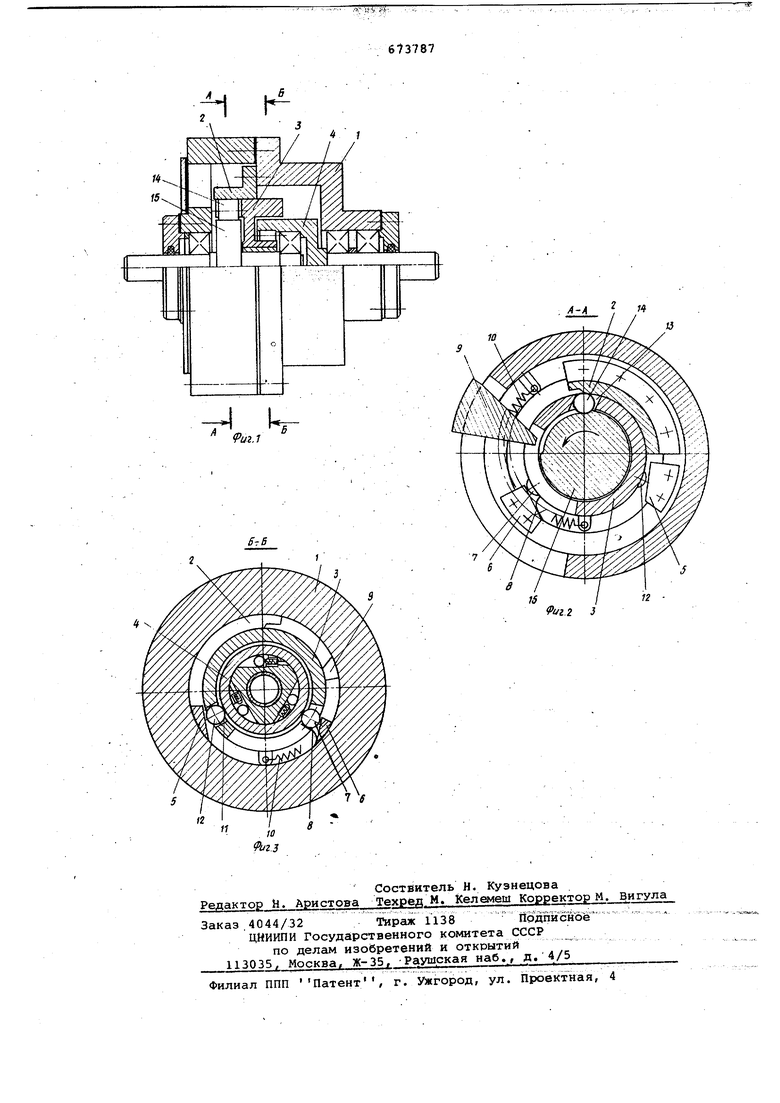
На фиг, 1 изображен механизм, общий вид; на фиг. 2 - разрез на фиг. 1; на фиг. 3 разрез на фиг. 1,,
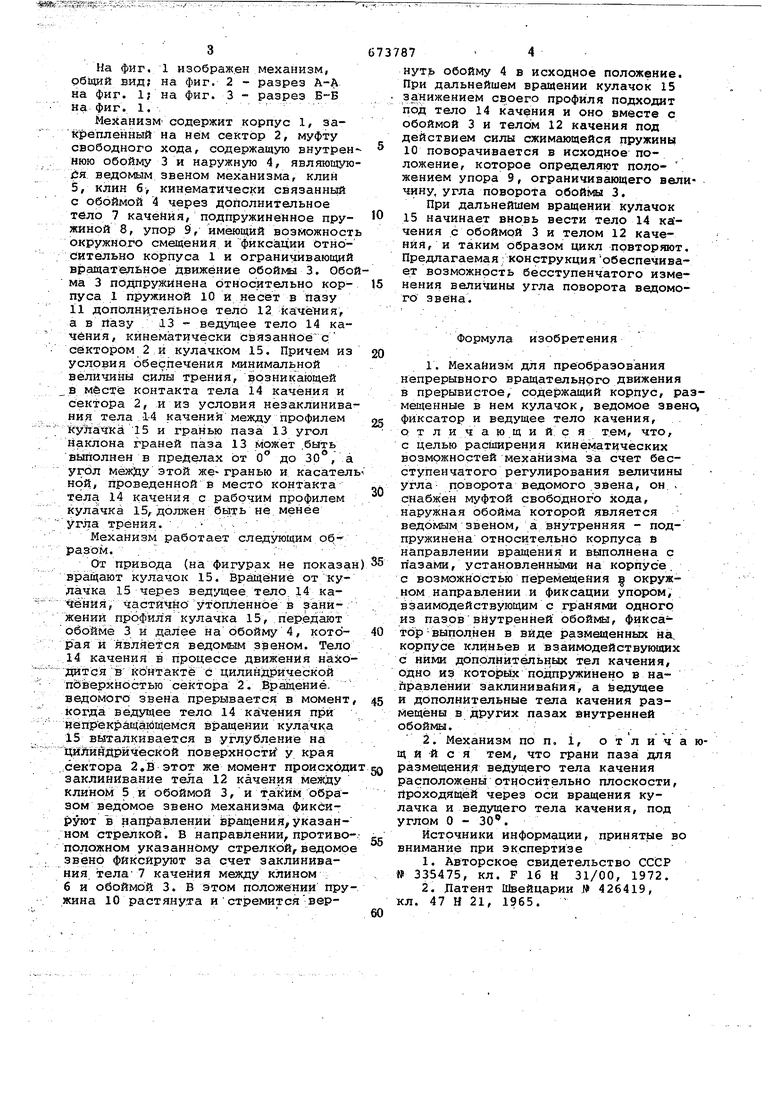
Механизм содержит корпус 1, закрепленный на нём сектор 2, муфту свободного хода, содержащую внутреннюю обойму 3 и наружную 4, являющуюйя ведомым звеном механизма, клин 5, клин б кинематически евязанньй с оезоймой 4 через дополнительное тело 7 качения, подпружиненное пру- JO жиной 8, упор 5, имеющий возможность окружного смещения и фиксации Относительно корпуса 1 и ограничивающий вращательное движение обоймы 3. Обойма 3 подпружинена относительно кор- 15 пуса 1 пружиной 10 и несет в пазу 11 дополни.тельное тело 12 Ка:чёния, а в пазу 13 - ведущее тело 14 качения, кинематически свяэавйоё с сектором 2 и кулачком 15. Причем из 20 условия обеспечения минимальной величины силь трения, возникающей
в месте контакта тела 14 качения и сектора 2, и из условия незаклинивания тела 1-4 качения между профилем пс kyiia Ka 15 и гранью паза1 13 угол наклона граней паза 13 может .быть выполнен в пределах от 0° до 30 , а угол мёжйУ этой же-гранью и касатель ной/ проведенной в мести контакта ,л тела 14 качения с рабочим профилем кулачка 15, должен €5ыть не менее
угла трения. - . V
Механизм работает следующим об-разом. . .
От привода (на фигурах не показан) 35 врайают кулачок 15. Вращение от кулачка 15 через ведущее, тело. 14 ка 1ёнйя, частичноутопленное в зани-. ж:ений профиля кулачка 15, .передают
обойме 3 и далее на обойму 4, кото- 40 ая и йвляё ся ведомым звеном. Тело
14качения s процессе движения находитоя .В контактё 6 цилин;црической nofeepxifjOcTbra сектора 2. .Вразцениё. звена прерывается в момент, 45 когда ведущее тело 14 качения при непрекращайщемся вращении кулачк.а .
15выталкивается в углубление Hai иййнйрйчёской поверхности у. края
сектора 2,В этот же момент происходит gQ заклинивание тела 12 качения между клином 5 и обоймой 3, и такйм образом ведомое звено механизма фиксиуют в направлении йращения/указаном стрелкой. В направлении, противо-.; оложном указанному стрелкой,ведомое звено фиксируют за счет заклиниваия тела 7 качения между клином , , б и обоймой 3. В этом положении пруина 10 растянута истремится вернуть обойму 4 в исходное положение. При дальнейшем вращении кулачок 15 занижением своего профиля подходит под тело 14 качения и оно вместе с обоймой 3 и телом 12 качения под действием силы сжимающейся пружины 10 поворачивается в исходное положение, которое определяют положением упора 9, ограничивающего величину, угла поворота обоймы 3.
При дальнейшем вращении кулачок 15 начинает вновь вести тело 14 ка чения с обоймой 3 и телом 12 качения, и таким образом цикл повторяют. Предлагаемая /конструкция обеспечивает возможность бесступенчатого изменения величины угла поворота ведомого звена.
Формула изобретения
1.Механизм для преобразования непрерывного вращательного движения
в прерывистое, содержащий корпус, рмещенные в нем кулачок, ведомое зве фиксатор и ведущее тело качения, о т л и ч а ю.Щ и и с я тем, что, с целью расширения кинематических возможностей механизма за счет бесступенчатого регулирования величины угла- поворота ведомого звена, он. . снабжен муфтой свободного хода, наружная Обойма которой является ведомым звеном, а внутренняя - подпружинена относительно корпуса в направлении вращения и вь полнена с пазами, установленными на корпусе. с возможностью перемещения щ окружном направлении и фиксации упором, взаимодействующим с гранями одного из пазов внутренней обой1«ы, фиксатор-выполнен в виде размещенных йа, корпусе клиньев и взаимодействующих с ними дополнительных тел качения, одно из которых подпружинено в направлении заклинивайия, а йедущее и дополнительные тела качения размещены в других пазах внутренней обоймы..
2.Механизм по п. 1, отличщ и и с я тем, что грани паза для размещени.я ведущего тела качения расположеньг относительно плоскости, йроходящёй через оси вращения кулачка и ведущего тела качения, под углом О - 30.
Источники информации, принятые в внимание при экспертизе
1.Авторское свидетельство СССР № 335475, кл. F 1б Н 31/00, 1972.
2.Датент Швейцарии . 426419, кл. 47 Н 21, 1965. 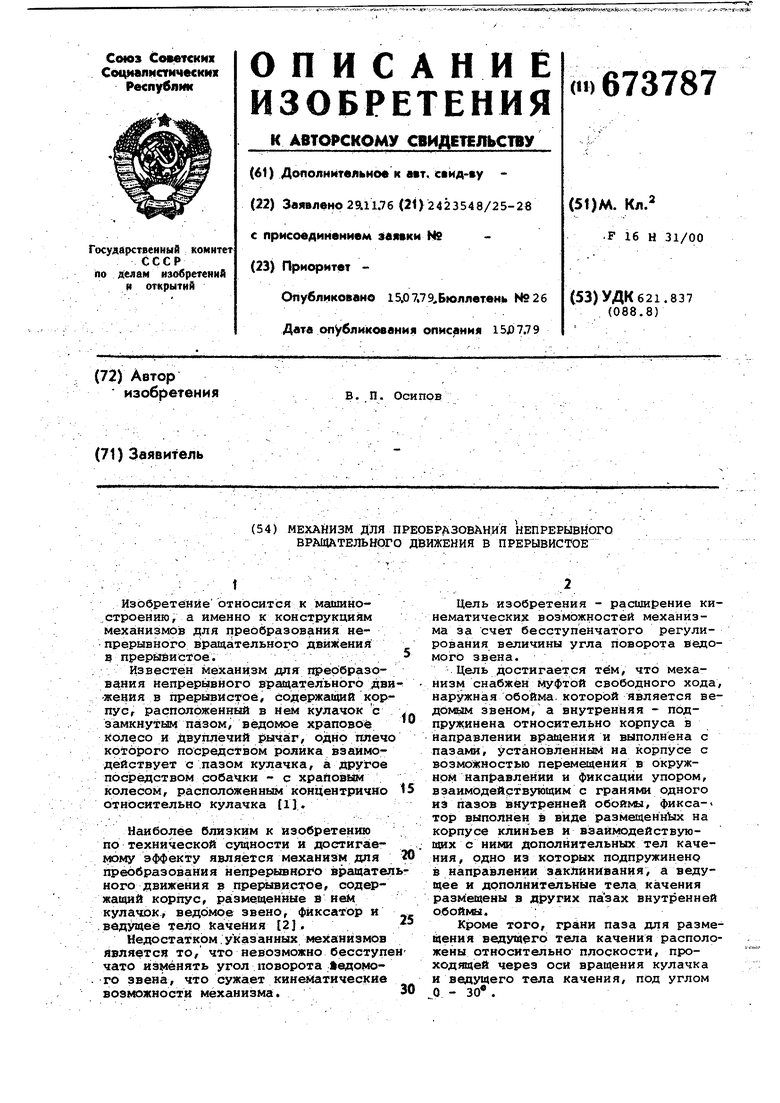
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2084727C1 |
| СООСНАЯ ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ ЗВЕНЬЯМИ | 2003 |
|
RU2241879C1 |
| ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ РОЛИКОВЫМИ ЗВЕНЬЯМИ | 2006 |
|
RU2323378C2 |
| ПЕРЕДАЧА СО СВОБОДНОЙ ОБОЙМОЙ | 2006 |
|
RU2327068C1 |
| Механизм преобразования вращательного движения в сложные | 1989 |
|
SU1733776A1 |
| СООСНАЯ ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ РОЛИКОВЫМИ ЗВЕНЬЯМИ | 2003 |
|
RU2247882C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Пространственный кулачковый механизм | 1984 |
|
SU1252578A1 |
| ФРИКЦИОННО-ПЛАНЕТАРНЫЙ МЕХАНИЗМ С КОСОЙ ШАЙБОЙ И БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА НА ЕГО ОСНОВЕ | 2000 |
|
RU2179671C1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |