(54) ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МСЩНОСТИ


| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный измеритель мощности | 1977 |
|
SU690339A1 |
| Цифровой измеритель мощности на валу | 1980 |
|
SU901860A1 |
| Цифровой измеритель мощности | 1980 |
|
SU901859A1 |
| Измеритель мощности | 1983 |
|
SU1081447A1 |
| Измеритель мощности | 1977 |
|
SU711389A1 |
| Измеритель мощности | 1983 |
|
SU1093925A1 |
| Цифровой фазометр | 1979 |
|
SU798622A1 |
| Адаптивный цифровой частотомер | 1980 |
|
SU917117A1 |
| Измеритель мощности | 1980 |
|
SU960556A1 |
| Многоканальный измеритель мощности | 1977 |
|
SU690338A1 |
Изобретение относится к контрольно|измерительной технике и может быть использовано для измерения мощности, передаваемой вращающимися валами.
Известный цифровой измеритель мощности, содержащий датчики крутящего, момента, угловой скорости, схемы ИЛИ, формир жатели, не обеспечивает необхоДИМОЙ точности измерения til
Наиболее близким по технической сущности, к изобретению является цифровой измеритель мощности, содержащий фазовый измеритель деформации с формирователями, схему управления, соединенную с блоком синхронизации, схемами И, ИЛИ, систему измерения деформации и счетчик результата с анализаторами О fi).
К недостаткам известного цифрового измерителя мощности относится низкая точность измерения мощности.
Цель изобретения заключается в по- вьяиении точности измерения мощности.
Указанная цель достигается за счет того, что в предлагаемый измеритель
введены регистр, счетчик измерения угловой скорости с блоком вентилей, разрядные входы которого через указанный блок вентияей подключены к обратнь м выходам регистра, входы которогочерез
20 схемы управления.
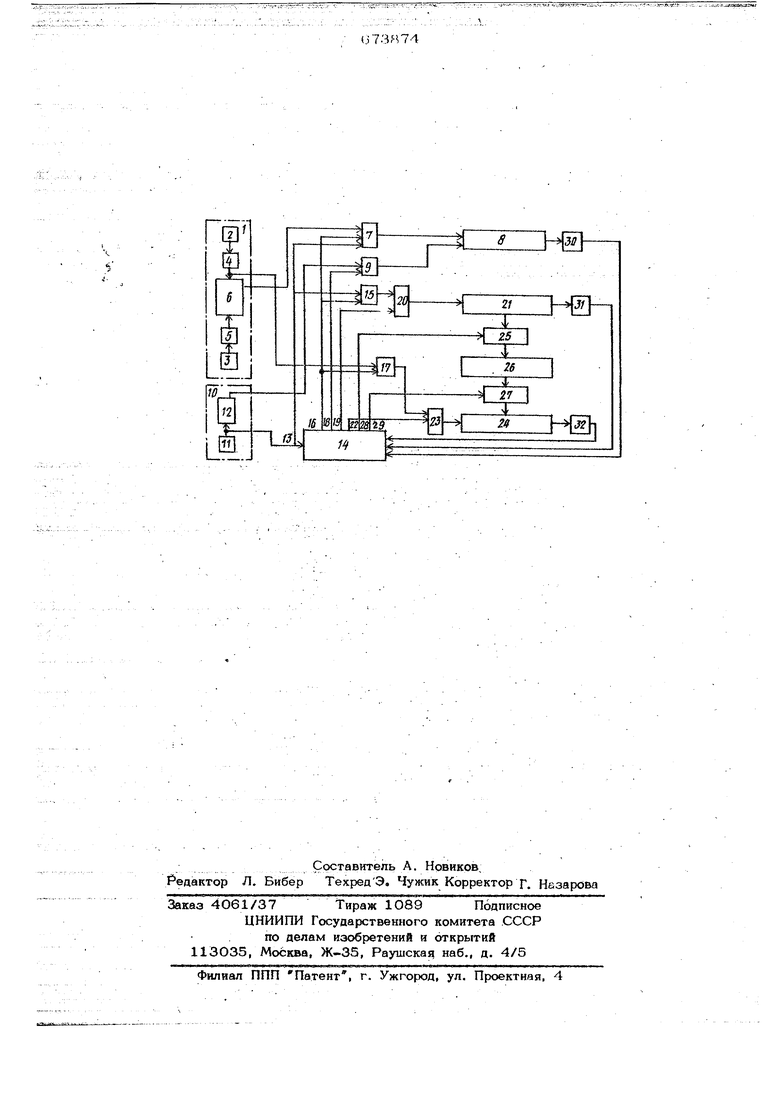
На чертеже приведен опнсьшаемый измеритель мощности, включающий в себя фазовый измеритель деформацни 1, содержащий датчики деформации 2 и 3, выходы каждого из которых через формирователи импульсов 4 и 5 связаны с входами фазового дискриминатора 6, выход которого соединен с первым входом трехвходовой схемы И. Вы ход схемы И 7 подключен к суммирующему входу реверсивного счетчика 8, вычитающий вход которого связан с выходом схемы И 9. Блок синхронизации 10 содержит высокочастотный кварцевы задающий генератор 11, соединешшй своим выходом с входом делителя частоты 12, а также с синхронизирующим входом 13 схемы управления 14, с тре им входом схемы И 7 и первым входом схемы И 15. Выход делителя частоты 12 подключен к первому входу схемы И 9. Первый режимный выход 16 схемы управления 14 связан со вторыми входами схем И 7, 15, 17, а второй режимный выход 1 в - со вторым вводом схемы И 9. Первый командный выход 19 схемы управления 14 соединен со вторым входом схемы ИЛИ 20, первый вход которой связан с выходом И 15, а выход схемы ИЛИ 2О подключен к счетному входу счетчика 21. Вто рой командный выход 22 связан со вторым входом схемы ИЛИ 23, чей первый вход соединен с выходом схемы И 17, а выход схемы ИЛИ 23 прдключел к счетному входу счетчика 24. Разрядные выходы счетчика 21 через блок вентилей 25 связаны с разрядными входами счетчика 26, разрядные выходы которо. го через блок вентилей 27 связаны с разрядными входами счетчика 24. Третий и четвертый командные выходы 28 и 29 схемы управления 14 соединены соответственно с импульсными входами блоков вентилей 25 и 27. Выходы счет чиков 8, 21, 24 через свои анализаторы О 30, 31, 32 сЬязаны соответственно с третьим, вторым и первым к6- мандными входами схемы управления 1 Цепи начальной установки счетчиков 8, 21, 24 и 26 на чертеже не показаны. Процесс определения мощности сосtTOHT из двух режимов; первый режим измерение, второй - вычисление. Датчики деформации 2 и 3 вырабаты вают сигналы, временной сдвиг и Т между которыми пропорционален отношению угла закручивания сечений при передаче валом крутящего момента Мкр к угловой скорости вращения валасо и сигналы поступают на формирователи импульсов 4 и 5, на выходе которых образуются определенной формы импульс) с частотой следования, пропорциональной угловой скорости вращения вала tt , причем временной СДВИГ между последовательностями импульсов, полученных на выходе формирователей 4 и 5, равны временному сдвигудТ между сигналами датчиков деформации 2 и 3. Поступившие на входы фазового дискриминатора в последовательности импульсов преобразуются на его выходе в новую последовательность импульсов, длительность которых равна измеряемому временному сдвигу между сигналами датчиков лТ , а период их следования обратно пропорционален скорости вращения вала: г X to где К, - коэффициент пропорциональности. В режиме измерение на первом режимном выходе 16 схемы управления 14 формируется разрешающий потенциал. При этом на счетчике 21 через схемы И 15, ИЛИ 20 поступают импульсы от задающего генератора 11с периодомТо). Фиксированное число этих импульсов определяет время измерения, которое рав- но: . . : Тмзм с -Тсо , где С - коэффициент пропорциональности. В это Же время на суммирующий вход реверсивного счетчика 8 в момент поступления импульсов от фазового дискриминатора 6 через схему И 7 поступают импульсы от задающего генератора 11, число которых за один периодТ состава за все время измерения -Д1 -Т«) Учитьшая Т, „j , получим: ti Al .г т JВременной сдвиг лТ между сигналами датчиков пропорционален отношению угла закручивания вала f к угловой скорости вращения вала Ш : tf лТ Кг.- f где Hi - коэффициент пропориионйльности
Гак как угол закручиваЕшя сечения вала пронораионялон величине крутящего кюмента М((р , переааваемог о валом, т. е.:
f - К.-М
кр
где К 5 - коэффициент пропорциональности то измеренное в счетчике 8 число импульсов будет равно:
Х -Ка-с
м
к
Р
Одновременно с этим импульсы от формирователя 5 с периодом Toi поступают через схемы И 17, ИЛИ 23 на вход счетчика 24. Интервал времени работы счетчика 24 выбирается меньше всего режима измерение (Тмзлл ). Тогда при переполнении счетчика 24 через анализатор О 32 поступает сиг. нал на первый командный вход схемы управления 14, по которому на выходе 28 формируется импульс, поступающий на импульсный вход блок вентилей 25. При этом в регистре 26 запоминается текущее значение счетчика 21.
Режим измерение, заканчивается по сигналу, поступающему при переполнении счетчика 21 через анализатор О 31 н второй командный вход схемы управления 14. При этом осуществляется переход к режиму вычисление.
В режиме вычисление разрешающий потенциал переключается на второй ре-, жимный вход 18 схемы управления 14. В этом случае осуществляется подача Ка вычитающий вход счетчика 8 через схему И 9 с выхода делителя 12 импульсов с периодом следования КТ, где К коэффициент деления делителя.
Одновременно с помощью формируемых схемой управления 14 командных сигналов реализуются циклические действия, заключающиеся в том, что число импульсов из регистра 26 по сигналу с выхода 29 схемы управления 14 пересылается в дополнительном коде через блок вентилей 27 в счетчике 24, на счетный вход которого с выхода 22 схемы управления 14 через схему ИЛИ 23 подается серия импульсов. По сигналу переполнения, поступающему через анализатор О 32 на первый командный вход схемы; управления 14, на ее выходе 19 формируется импульс, который через схему ИЛИ 2О ггоступает на счетный вход счетчика результата 21, и одновременно с этим пересылкой числа из регистра 26 в счет 24 начинается следующий цикл. Таким образом, на счетный вход счетчика результата 21 поступает последовательность командных импульсов. Режим вычисление заверщается при поступлении на третий командный вход- схемы управления 14 сигнала с выхода анализатора О 30, свидетельствующего об обнулении счетчика 8. В результате этого число импульсов, зафиксированное счетчиком результата 21, .будет пропорционально мощности передаваемой валом.
Формула изобретения
20
Цифровой измеритель мощности, содержащий ({йзовый измеритель деформации с формирователями, схему управления, соединенную с блоком синхронизации, схемами И, ИЛИ, счетчик измерения деформации и счетчик результата с.анализаторами О, отличающийся тем, что, с целью повышения точности намерения мощности, в него введены регистр, счетчик измерения угловой скорости с блоком вентилей, разрядные входы которого через указанный блок вентилей подключены к обратным выходам регистра, входы которого через свой блок вентилей связаны с разрядными выходами счетчика результата, счетный вход которого через схему ИЛИ соединен с первым командным выходом схемы управления, при этом выход счетчика измерения угловой скорости через анализатор О подключен к первому командному входу схемы управления, а его счетный вход соединен с выходом схемы ИЛИ, первый вход которой через схему И связан с выходом одного из формирователей фазового измерителя деформации, а также с первым режимным выходом схемы управления, а второй вход схемы ИЛИ связан со вторым командным выходом схемы управления.
Источники информации, принятые bo внимание при экспертизе
Ш
