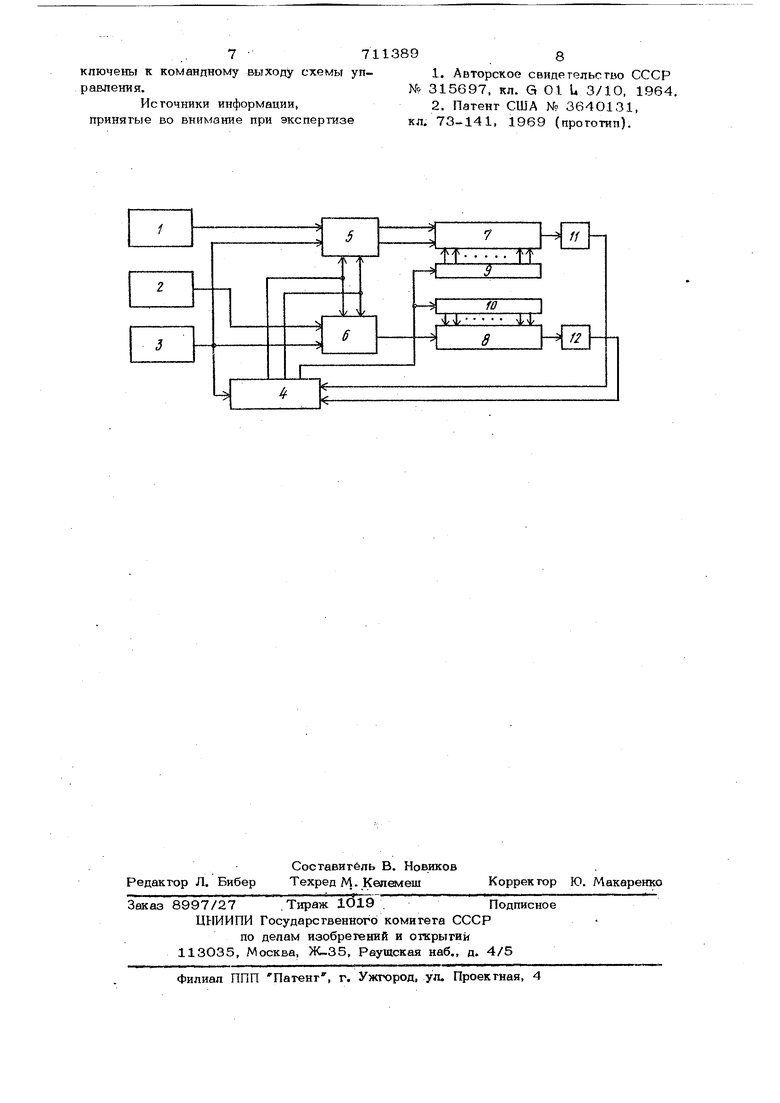
Изобретение относится к области конт рольно-измерительной техншЙ и предназначено для измерения мощности, передава емой Вращающимися валами. Известен измеритель мощности, передаваемой вращающимися валами, содержащий измеритель деформации, связанный с генератором, счетчик измерения деформации и результата, логические схемы, не обеспечивает требуемой точности измерения мощности l . Наиболее, близким по технической сущности к изобретению является измеритель мощностей, содержащий фазовый измеритель деформации, соединенный через пер.вую логическую схему с входами реверсивного счетчика измерения деформации,измеритель скорости вращения вала, связанный через вторую логическую схему с входом счетчика результата, схему управ ления, подключенную своими режимными выходами к входам обеих логических схем, задающий генератор, подключенный к синхронизирующим входам схемы управления и обеих логических схем, а также анализаторы О, связанные своими входами с выходами соответствующий счетчиков, а выходами - с входами схемы управления. К недостаткам известного измерителя относится низкая точность измерения мощности. Цепью изобретения является повышение точности измерения мощности. Указанная цель достигается за счет того, что в него введены два блока внесения уставок, выходы каждого из которых соединены соответственно с разрядными входами счетчика измерения деформации и счетчика результата, а входы указанных блоков внесения уставок подключены к командном выходу схемы управления. На чертеже представлен предлагаемый измеритель мощностей, состоящий из фазового измерителя деформации 1, измерителя скорости вращения пала 2, высокочастотного задающего генграгора 3, схе37мм управления 4, первых и вторых логических схем 5 и б, реверсивного счегчика 7 измерения деформации, счегчика 8 резульгата, блоков внесения уставок 9 и 10, анализаторов О 11 и 12. Выход фазового измерителя деформации 1 соединен с измерительным входом первой логической схемы 5, а выход измерителя скоросг-й 2 связан с измерительным входом второй логической схемы 6. Выход задающего генератора 3 подклю чен к синхронизирующим входам схемы управления 4 и логических схем 5 и 6. Первый и второй режимные выходы схемы управления 4 связаны соответственно с первыми и режимными входами логи ческих схем 5 и 6. Первый и второ и выходы первой логической схемы 5 соединены со огветсгветго с суммирующим и вы читающим входами счетчика 7. Выход второй логической схемы 6 подключен к входу счетчика 8. Разрядные входы счетчиков 7 и 8 связаны с выходами своих блоков внесения ус тавок 9 и 10, входы которых подключены к командному выходу схемы управления 4. -Выходы счетчиков 7 и 8 через свои анализаторы О 11 и 12 связаны с первым и вторым командными входами схемы управления 4. На выходе фазового измерителя деформации 1 формируются импульсные сигналы, длительность которых Т пропорциональна отношению утла закручивания сечений пр передаче валом Крутящего .момента Мкрк угловой скорости вращения вала OU- Эти . сигналы поступают на измерительный вхо логической схемы 5. В первом режиме на первых регкимных входах логических схем 5 и 6 с выхода схемы управления 4 формируется разрешающий потенциал. При этом первой логической схемой 5 с помощью сигналов от задающего генератора 3 (период следования которых Т ь) каждый период дТ преобразуется в пач ку импульсов с количеством Т, , П-.(1) Эти сигналы поступают на суммирующий вход реверсивного счетчика 7, где производится накопление всех пачек импульсов за весь интервал измере1Шя T Интервал измерения формируетсй сче чиком 8 путем накопления до переполнения синхрони дируюших импульсов задающего генератора 3, поступающих в первом режиме через вторую логическую сх му 6. Время измерения будет равно: с -Т где Cg - число импульсов, подсчитываемых счетчиком 8. Так как период следования каждой пачки импульсов равен периоду следования сигналов измерителя скорости вращения вала 2 (), то число импульсов, зафиксированное счетчиком 7 будет равно -тОБ(3) Учитывая выражения (1) и (2), получим1д у ОБ(4) Сигнал переполнения счетчика 8 через анализатор О 12 поступает на второй командный вход схемы управления 4. При этом происходит переключение разрешающего потенциала на второй режимный выход схемы управления 4, в результате чего прекращается счет пачек в счетчике 7, и первая логическая схема 5 подключает к его вычитающему входу сигналы, следующие от задающего генератора 3, а вторая логическая схема 6 вместо сигналов подключает к входу счетчика 8 сигналы, следующие от измерителя скорости 2, с периодом . Время отсчета импульсов в счетчике 7 до его обнуления составит число импульсов, зафиксированное при этом счетчиком 8, будет равно м- с учетом выражения (4): N , (8) ОБ (JL) - коэффициенты пропорциональгде К., Кл JL ности, то результат измерения может быть представлен ЛЛкрШ Так как мо1:1ность, передаваемая валом, равна: P-MKpU); ,.. (Ю) К..С, то, принимая 1получимН Кз, откуда следует, что полученное в счетчи57ке 8 число импульсов пропорционально мощности, передаваемой валом. Описанный порядок работы устройсгва соответствует функционированию измерителя мощности аналогично прототипу при условии отсутствия погрешностей, огфеделясмых неточностью начальной установ ки датчиков деформации и различием жесткостей валов у различных агрегатов. Неточность начальной установки датчиков по углу приводит к тому, что изме ряемое значение сдвига фаз ЛТ отличается от реального ДТр на некоторую величину uiC и будет равно (12 В этом случае, подетавив. (12) в (4) получим, что число импульсов, зафиксиро ванное счетчиком 7, будет равно йТрСд VI --Р-8 Т - Т Л i06ОБ где второе слагаемое является ошибкой, определяемой неточностью начальной уста новки датчиков деформации по углу. Коррекция этой ошибки в предлагаемом устройстве может быть осуществлена путем предварительного внесения до начала измерения с помощью вводимого в устройство блока внесения уставки 9 в счет чик 7 уставки, величина которой равна дополнительному коду от значения ошибки Тоб Это значение ошибки в предлагаемом устройстве может быть достаточно просто определено при отсутствии нагрузкк на валу (т.е. при нулевом значении Мцр и, следовательно, при ДТр - О ), так как в этом случае из выражения (13) следует, что число импульсов, зафиксированное счетчиком 7, -будет равно то есть число, соответствующее величине ошибки начальной установки датчиков деформации. Ошибки от различия жесткости валов и неточности начальной осевой установки датчиков возникают в связи с тем, что угол скручивания сечений пропорционален АЛц.р г то есть , А - коэффициент пропорциональ кости, зависящей от модуля упрутости материала вала 89 (жесткости), расстояния между сечениями и полярного момента инерции вала. Так как временный сдвиг фаз датчиков деформации л Т пропорционален углу скручивания, то отличия углов скручивания в различных валах ( оС, и сЛ.2) приводят к соотаететвуюи1ему различию временных сдвигов лТ и , . Из выражения (7) следует, что при одинаковых Мкри Uj различие дТ и различных валах определяется различием коэффициента KJ . Таким образом, для получения однозначного результата о величине переда- . ваемой различными валами мощности N при одинаковых значениях tl) из выражения (9) следует, что из-за разбросов величины k для различных экземпляров валов необходимо соответствующее изменение C-g .для сохранения постоянства величины произведения . Это изменение числа импульсов Cg , подсчитываемых в счетчике 8, возможно реализовать в измерителе путем предварительного внесения в счетчик 8 с помощью блока внесения уставок 10 определенного .значения уставки, которое определяется по результатал г тарировочныхиспытаний. Формула изобретения Измеритель мощности, содержащий фазовый измеритель деформации, соединенный через первую логическую схему с входами реверсивного счетчика измерения деформации, измеритель скорости вращения вала, связанный через вторую логическую схему с входом счегчика результата , схему управления, подключенную своими режимными выходами к входам обеих логических схем, задающий генератор, подключенный к синхроиизируюш.им входам схемы управления и обеих логических схем, а также анализаторы О, связанные своими входами с выхода ш соответствующих счстиков, а вьроэдами - с входами схемы управления, отличающийся тем, что, с целью повышения точности измерения, в него введены два блока внесения увтавок, выходы каждого из которых соединены соответственно с разрядными входами счегчкка измерения доформации и счетчика розульгата, а входы указанных блоков внесения усгавок попключены к командному выходу схемы управления.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 315697. кл. Q 01 U 3/10, 1964.
2.Патент США № 3640131, кл. 73-141, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный измеритель мощности | 1977 |
|
SU690338A1 |
| Измеритель мощности | 1980 |
|
SU960556A1 |
| Цифровой измеритель мощности | 1978 |
|
SU763705A2 |
| Цифровой измеритель мощности на валу | 1980 |
|
SU901860A1 |
| Измеритель мощности | 1983 |
|
SU1081447A1 |
| Дискретный измеритель мощности | 1977 |
|
SU690339A1 |
| Цифровой измеритель мощности | 1977 |
|
SU673874A1 |
| Цифровой измеритель мощности | 1980 |
|
SU901859A1 |
| Измеритель мощности | 1983 |
|
SU1093925A1 |
| Устройство для измерения активной мощности | 1990 |
|
SU1781628A1 |
