(54) ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ НА ВАЛУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель мощности | 1980 |
|
SU901859A1 |
| Измеритель мощности | 1983 |
|
SU1081447A1 |
| Измеритель мощности | 1980 |
|
SU960556A1 |
| Дискретный измеритель мощности | 1977 |
|
SU690339A1 |
| Цифровой измеритель мощности | 1977 |
|
SU673874A1 |
| Измеритель мощности | 1983 |
|
SU1093925A1 |
| Измеритель мощности | 1988 |
|
SU1527522A1 |
| Адаптивный цифровой частотомер | 1980 |
|
SU917117A1 |
| Цифровой частотомер | 1980 |
|
SU928245A1 |
| Измеритель мощности | 1977 |
|
SU711389A1 |

1
Изобретение относится к контрольно-измерительной технике и может быть использовано япя измерения мощности, передаваемой вращающимися валаалм,
известен цифровой измеритель моад-. ности, содержащий фазовый измеритель деформации, блок синхронизации и схему управления, связанные посредством элементов И со входами счетчика измерения деформации, и устройства возведения в квадрат, выходы которых через свои анализаторы нуля соединены с соответствующими командными входами схемы управления 1.
Однако такой измеритель мощности не обеспечивает требуемой точности измерения.
Наиболее близким к предлагаемому является цифровой измеритель мощнос,ти на валу, содержащий фазовый измеритель деформации, блок синхронизации, схему управления, счетчики деформации, угловой скорости и результата измерения, связаннь1е через, свои анализаторы нуля с соответствующими командными входами схемы управления, логические схемы И и ИЛИ, посредством которых вычитающий вход счетчика деформации и входы, счетчиков результата измерения и угловой
скорости соединены с соответствую1ЦИМИ режимными выходами схеьсл управления и выходс1ми блока синхронизации, и входной блок счетчика деформации и с элементами И первые и вторые входы которых связаны соответственно с блоком синхронизации и соответствующим режимным выходом схемы управления 2.
10
Недостатком известного измерителя является низкая точность измерения, обусловленная влиянием нестабильности скорости вращения вала в процессе измерения.
15
Цель изобретения - повышение точности измерения.
Указанная цель достигается за счет того, что во входной блок счетчи.ка-деформации введены делители на
20 три, триггер и два элемента .ИЛИ, при этом вход триггера связан через делитель с измерителем деформации, первый разрядный выход делителя соединен с управляющим вводом схемы
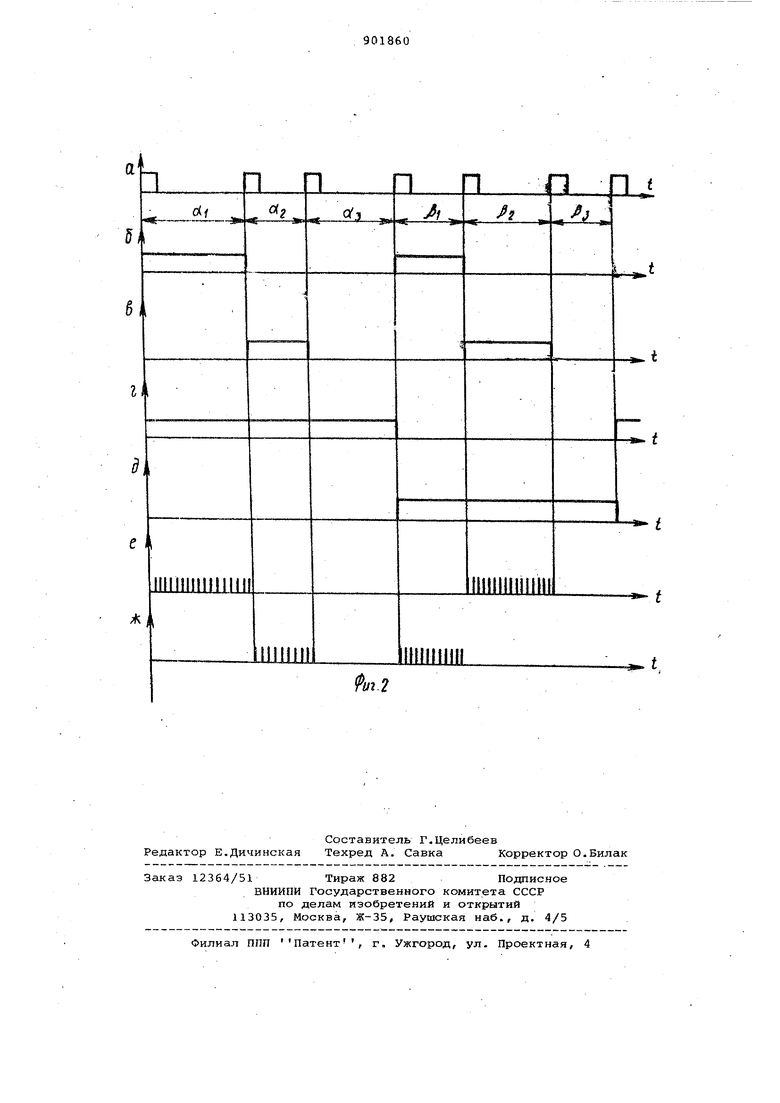
25 управления и третьими входами первого и третьего злементов И, второй разрядный выход - с третьими, входами- второго и четвертого элементов И, а единичный и нулевой выходы тригге30ра связаны соответственно с четверTi.JMH входами первого, четвертого и второго, третьего элементов И, причем выходы первого, второго и третьего, четвертого элементов И соединены через соответствующие элемен ты ИЛИ с суммирующим и вычитающим входами счетчика деформации. На фиг.1 представлена функциональная схема предлагаемого измерителя; на фиг.2 - временная диаграмма работы основных узлов измерителя Цифровой измеритель (мощности на валу содержит фазовый измеритель 1 деформации, индукторы 2 и 3, чувствительный элемент 4, формирователь импульсов, высокочастотный кварцевы задающий генератор 6, делитель 7 ча тоты, схему 8 управления, входной блок 9 счетчика деформации, делитель 10 на три, триггер 11, эле менты И 12 - 15, логические схемы 16 - 18, элементы ИЛИ 19 и 20, логи ческие схемы ИЛИ 21 и 22, реверсивный счетчик 23 деформации/ счетчик результата измерения, счетчик 25 уг ловой скорости, регистр 26 и анал заторы 27 - 29 нуля. фазовый измеритель деформации 1 содержит размещенные на валу индукторы 2 и 3, чувствительный элемент выход которого соединен со входом формирователя 5 импульсов. ,Одни то цы цилиндрических индукторов 2 и 3 жестко закреплены в контрольных сеч ниях вала, а другие снабжены дискам с зубьями и пазами и опираются на подц,гипники. Зубья одного индуктора расположены в пазах другого с периметрическим зазором и поочередно взаимодействуют.с чувствительным эл ментом 4. Выход формирователя 5 импульсов связан с первым входом схемы И 18 и со входом делителя 10 на три, входящего в состав входного блока 9 счетчика деформации, куда входят также триггер 11, элементы И 12 - 15, элементы ИЛИ 19.и 20. Вы ход делителя 10 связан со счетным входом триггера 11, единичный и нулевой выходы которого соединены с четвертыми входами,соответственно элементов И 12 - 15 и элементов И 13 и 14. Первый и второй разрядные выходы делителя 10 соединены с третьими входами соответственно элемен тов И 12 и 14 и элементов И 13 и 15 причем первый разрядный выход делителя 10 связан также с управляющим входом схемы 8 управления, первый режимный выход которой подключен ко вторым входам элементов И 12 - 15, к первому входу схемы И 17 и ко вто входу схемы И 18. Второй режим ный выход схемы 8 управления соединен с первым входом схемы И 16. Выход задающего генератора 6 связан с первыми входами элементов и 12 - 1 со вторым входом схемы И 17, с синх ронизирующим входом схемы -8 управления и через делитель 7 частоты - со вторым входом схемы И 16. Выходы элементов И 12 и 13, а также элементов И 14 и 15 и логической схемы И 16 соответственно через элементы ИЛИ 19 и 20 подключены к суммирующему и вычитающему входам реверсивного счетчика 23 деформации, выход которого через анализатор 27 нуля связан с первым командным входом схемы 8 управления. Выход схемы И 17 и информационный выход схемы 8 управления через схему ИЛИ 21 подключены ко входу счетчика 24 результата, выход которого через анализатор 28 нуля связан со вторым командным входом схемы 8 управления, первый и второй командные выходы которой соединены соответственно со входом переписи информации из счетчика 24 в регистр 26 и со входом переписи информации из регистра 26 в счетчик 25. Разрядные выходы счетчика 24 через регистр 26 связаны с разрядными входами счетчика 25. Выход схемы И 18 И тактия рующий выход схемы 8 управления через схему ИЛИ 22 подключены ко входу счетчика 25, выход которого через анали-затор 29 нуля связан с третьим командным входом схемы 8 управления (цепи начальной, установки счетчиков 23 - 25 не показаны). Принцип снижения погрешности измерения, положенный в .основу измерителя, заключается в том, что процесс обработки информации об угле скручивания вала (вычисление разности временных интервалов, сформированных при прохождении под чувствительным элементом двух соседних пар зубьев индукторов) реализован по алгоритму, при котсэром формируемые фазовым измерителем 1 деформации интервалы времени разбиваются на триады ( oCjt/ cCj,, ) ; ( jjj, PI , pj ) ; . . . и т .д. (фиг.2),. а результат вычисляется суммированием следующих разностей ((j,) + ( f,i- р,) + .... Измеритель ..работает следующим образом. При вращении вала зубья индукторов 2 и 3 взаимодействуют поочередно с чувствительным элементом 4 (например, катушкой индуктивности с сердечником из постоянного магнита). Временной сдвиг между соседними импульсами на выходе формирователя 5 пропорционален геометрическому углу сдвига между соответствующими зубьями индукторов (фиг,2а). Начальная установка индукторов 2 и 3 на валу выполняется так, что при всех BOS-можных значениях крутящего момента М,(р удовлетворяется условие (оС fof-t) , (oCjvfe) и т.д. При наличии и возникновении угла скручивания вала, взаимное расположение индукторов 2 И 3 меняется и происходит относител нов смещение импульсов, генерирузмых одним и вторым индуктором. При этом изменение разности (t-aCi) однозначно характеризует величину угла скручивания (деформацию) вала. Импульсы с выхода чувствительног элемента 4 через формирователь 5 по ступают на вход делителя 10 на три, на первом (фиг.26) и втором (фиг.2в разрядных выходах которого формирую ся сигналы состояния. Так как счетный выход делителя 10 связан со сче ным входом триггера 11, то состояни триггера 11 (фиг.2г - единичный выход, фиг.2д - нулевой выход) меняет ся через каждый три импульса, посту пающих от фазового измерителя 1 деформации . Процесс определения мощности измерителем состоит из двух режимов: измерение и вычисление. В режиме Измерение в.счетчике 23 определя ется величина, пропорциональная , а с помощью счетчиков 24, 25 и регистра 26 определяется величина, про порционсшьная скорости враццения вала Входным блоком 9 счетчика деформации обеспечивается реализация вышеуказанного алгоритма измерения Мцр В режиме Измерение на первом режимном выходе схемы 8 управления фор мируется разрешающий-потенциал (син хронизирюванный сигнгшом, поступающим на управляющий вход схемы 8 управления с первого разрядного выхода делителя 10 на три), который поступает на вторые входы элементов И 12 - 15.На первые входы указанных элементов поступают импульсы от.зад щего генератора 6 с периодом следов ния Тр. В зависимости от состояния триггера 11 и разрешающих сигналов первом-и втором разрядных выходах де лителя 10 импульсы от задающего гене ратора 6 поступают то на суммирующий то на вычитающий входы счетчика 23,, причем каждый третий интервал времёни не используется для счета. В интервалах времени оС и р, импульсы опорной частоты поступают на суглмирующий вход (фиг.2е),- а в интервалах Xj и f - на вычитагадий вход (фиг.2ж счетчика 23. Начальная установка счетчика 23 соответствует дополнительному значению кода () при , что является условным нулем отсчета. При наличии аС. увеличи вается, а oCj уменьшается и разность ) характеризует реальную величину Muf (деформацию вала). Таким образом, в режиме Измерение счет чиком 23 регистрируется число пропорционсшьное Мкр h, К. Мкр., где Кл - коэффициент пропорциональности. Одновременно с этим в режиме Измерение определяется вели- чина, пропорциональная скорости вращения вала. Импульсы с выхода формирователя 5, частота следования которых пропорциональная скорости вращения вала, поступают через схему И 18 {на втором входе которой имеется разрешающий потенциал от первого режимного выхода схемы 8 управления) и через схему ИЛИ 22 на вход счетчика 25. :Начальной установкой счетчика 25 его емкость выбирается такой, чтобы интервал времени его работы (до обнуления) был меньше времени всего режима измерения. При обнулении счетчика 25 через анализатор 29 нуля поступает сигнал на третий команд ный вход схемы 8 управления, на первом командном выходе которой формируется импульс, осуществляющий пере- . пись- информации из счетчика 24 в регистр 26. К этому моменту в счетчике 24 содержится код текущего времени, регистрируемого импульсами опорной частоты с выхода задающего генератора 6 через схему И 17 (на первом входе которой имеется разрешающий потенциал от первого режимного .выхода схемы 8 управления) и через схему ИЛИ 21. Полученный таким образом в регистре 26 код обратно пропорционален скорости вращения вала. „ Кг. г где Kj - коэффициент пропорциональности. Сигнал на окончание режима -Измерение поступает при переполнении счетчика 24 через анализатор 28 нуля на второй командный вход схемы 8 управления. Этот сигнал не синхронизирован с входными импульсами формирователя 5 и для исключения низкочастотной составляющей погрешности схемой 8 управления осуществляется удлинение режима Измерение, который заканчивается при поступлении очередного сигнала на управляющий вход схемьт .8 управления с первого разрядного выхода делителя 10 на три,, обеспечивая отсчет целого числа триад. В этот момент осуществляется переход к режиму Вычисление, в котором реализуется подсчет в счетчике 24 результата числа импульсов, период следования которых обратно пропорционален угловой скорости л) , за интервал времени, пропорциональный крутящему моменту Мир. В режиме Вычисление разрешающий потенциал переключается с первого на второй режимный выход схемы 8 управления, В этом случае осуществляется подача на вычитающий вход счетчика 23 через схему И 16 и элемент ИЛИ 20 импульсов с выхода делителя 7 частоты с периодом следования Kj Тд (Кз - коэффициент деления делителя 7). Длительность режима Bbjv числение определяется формируемым счетчиком 23 интервала времени, равным n . Kj Tjj. . Одновременно с помощью формируемых схемой 8 управления сигналов реализуются циклические действия, заключающиеся в том, что число п из регистра 26 по сигналу со .второго командного выхода схемы 8 управления пересылается в счетчик 25 на вход которого с тактирующего выхода схемы 8 управления через схему ИЛИ 22 подается серия импульсов опорной частоты с периодом Тсс Отсчитав интервал времени , , счетгчик 25 обнуляется и с выхода анализатора 29 нуля на третий командный вход схемы 8 управления поступит си-гнал, по которому на информационном выходе схемы 8 управления формируется импульс, поступаю1цнй через схему ИЛИ 21 на счетный вход счетчика 24 результата, Одновременно с этим, пересылкой числа п из регистра 26 в счетчик 25, начинается следующий цикл, и описанные действия циклически повторяются. Таким образом, на вход счетчика 24 результата поступают импульсы.с периодом п, Tff в течение времени, равного п., Т(. Режим Вычисление завершается при поступлении на первый командный вход схемы 8 управления сигнала с выхода ангшизатора 27 Нуля, свидетельствующего об обнулении счетчика 23. В результате этого число импульсов, зафиксированное счетчиком 24 результата, будет равно
Ку1 -эМкр-и)
и,. и,.Тсч
N
, Т., К,
г- сч- г.
Так как мощность N, передаваемая валом, равна произведению , то полученный,в счетчике 24 код будет пропорционален измеряемой мощности.
Использование во входном блоке счетчика деформации делителя на три, триггера и двух элементов ИЛИ повышает точность измерения мощности при нестабильности скорости вращения вала.
Формула изобретения
Цифровой измеритель мощности на валу, содержащий фазовый измеритель деформации, блок синхронизации, схему управления, счетчики деформации, угловой скорости и результата измерения, связанные через свои анализаторы нуля с соответствующими командными входами схемы управления, логические схемы И и ИЛИ, посредством которых вычитающий вход счетчика деформации и входы счетчиков результата измерения и угловой скорости соединены с соответствующими . жимными выходами схемы управления и
5 выходами блока синхронизации, и входной блок счетчика деформации с элементами И, первые и вторые входы которых связаны соответственно с блоком синхронизации и соответствующим
0 режимным выходом схемы управления, отличающийся тем, что, с целью повьЕцения точности измерения, во входной блок счетчика деформации введены делитель на три, триггер и
5 два .элемента ИЛИ, при этом вход триггера.связан через делитель с из.мерителем деформации, первый разрядный выход делителя соединен с управляющим входом схемы управления и тре0тьими входами первого и третьего элементов И, второй разрядный выход - с третьими входами второго и четвертого элементов И, а единичный- и нулевой выходы триггера связаны соответственно с четвертыми входами первого,
5 четвертого и второго, третьего элементов и, причем выходы первого, второго и третьего, четвертого элементов И соединены через соответствующие элементы ИЛИ с суммирующим и вычитающим входами счетчика деформации.
Источники информации, принятые во внимание при экспертизе
5
690339, кл. G 01 L 3/24, 21.09.77,
