(54) ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель мощности на валу | 1980 |
|
SU901860A1 |
| Измеритель мощности | 1980 |
|
SU960556A1 |
| Измеритель мощности | 1983 |
|
SU1093925A1 |
| Измеритель мощности | 1983 |
|
SU1081447A1 |
| Цифровой измеритель мощности | 1977 |
|
SU673874A1 |
| Измеритель мощности | 1988 |
|
SU1527522A1 |
| Дискретный измеритель мощности | 1977 |
|
SU690339A1 |
| Устройство синхронизации сигналов | 1981 |
|
SU1021005A2 |
| Цифровой измеритель мощности | 1978 |
|
SU763705A2 |
| Устройство фазовой автоподстройки частоты | 1984 |
|
SU1352645A1 |
I
Изобретение относится к контрольно-измерительной технике и может быть (Использовано для измерения мощности, передаваемой вращающимися валами. .
Известен цифровой измеритель мощности, содержащий фазовый измеритель деформации, блок синхронизации и схему управления, связанные посредство элементов И со входами счетчика измерения деформации, и устройства возведения ,в квадрат, выходы которых через свои анализаторы нуля соединены с соответствующими командными входами схемы управления 1.
Однако такой измеритель не обеспечивает требуемой точности измерения.
Наиболее близким к предлагаемому является цифровой измеритель мощности, содержащий фазовый измеритель деформации вращающегося веша, блок управления, блок синхронизации в виде последовательно соединенных генератора импульсов и делителя, счетчики определения деформации, угловой скорости и результата измерения, связанные через свои анализаторы нуля с соответствующими управляющими входа ми блока управления синхронизирую.щий вход которого соединен с выходом генератора блока синхронизации, блок
вентилей, связанный с разрядными входами счетчика угловой скорости, и элементы И и ИЛИ, посредством которых выход делителя блока синхронизации И режимные выходы блока управления х :оединены с соответствующими счетчиками 2}.
Недостатком известного измерителя является низкая точность измерения,
10 обусловленная неидентичностью изготовления зубьев индукторов фазового измерителя деформации и использованием фиксированного |штервала време-, ни измерения, а также некратностью
5 времени измерения и периода следования импульсов с измерителя деформацииЦель изобретения - повышение точности измерения.
20
Указанная цель достигается тем, что в измеритель введены счетчик . числа зубьев индукторов измерителя деформации, первый и второй управляющие триггеры, ограничитель длитель25 яостй, вспомогательный,счетчик, дополнительный элемент ПЛИ и два допол.ннтельных элемента И, а счетчик угловой скорости снабжен вычитающим входом, при этом вход счетчика числа
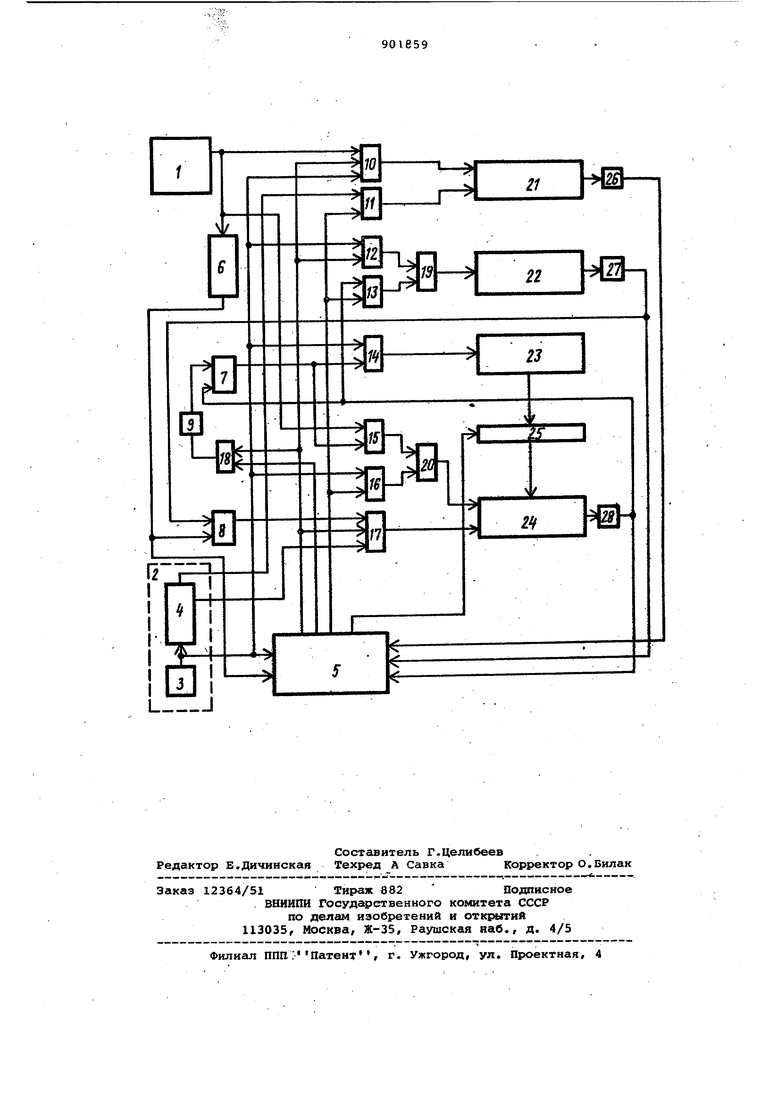
30 зубьев соединен с измерителем деформации, а выход связан с нулевым входом второго управляющего триггера и дополнительным синхро.низирующим входом блока .управления, нулевой вход первого управляющего триггера соединен через ограничитель длительности с выходом дополнительного элемента ЛИ, первый и второй входы которого связаны с соответствующими режимными выходами блока управления, вход вспомогательного счетчика, соединенного выходом с блоком вентилей, связан через один дополнительный элемен И с выходом генератора импульсов бло ка синхронизации и выходом первого управляющего триггера, причем единич ные входы первого и второго управляю щих триггеров соединены соответствен но с выходом анализатора нуля счетчи ка угловой скорости и выходом анализатора нуля счетчика результата, а вычитающий вход счетчика угловой ско рости через другой дополнительный элемент И связан с выходом второго управляющего триггера, соответствующим реж -1мным выходом блока управления и дополнительным выходом делителя блока синхронизации. На чертеже представлена блок-схема предлагаемого измерителя. Цифровой измеритель мощности содержит фазовый измеритель, 1 деформации, блок 2 синхронизации, включаю1ДИЙ задающий генератор -3 опорных импульсов и делитель 4, блок 5 управ ления, счетчик б числа зубьев индукторов, первый и второй управляющие триггеры 7 и 8, ограничитель 9 длительности, элементы И 10 - 13, один дополнительный элемент И 14, элемен ты И 15 и 16, другой дополнительный элемент И 17, дополнительный . -элемент ИЛИ 18, элементы ИЛИ 19 и 20, счетчик 21 определения деформации, счетчик 22 результата измерения, вспомогательный счетчик 23, счетчик 2.4 угловой скорости, блок 25 ве тилей и анализаторы 26 - 28 нуля. Выход фазового измерителя 1 дефор мации связан с первыми входами элементов И 10 и 15, а также со входом счетчика б, выход которого подключен к нулевому входу второго управляюще го триггера 8 и к дополнительному синхронизирующему входу блока 5 управления. Выход задающего генератора 3 связан со входом делителя 4, .. с синхронизирующим входом блока 5 у равления, а также с третьим входом элемента И 10 и с первыми входами элементов И 12, 14 и 16. Основной в ход делителя 4 соединен с первым вх дом элемента И 11, а дополнительный выход - с третьимвходом элемента И 17. Первый режимный выход блока 5 управления подключен ко вторым входам элементов И 10, 12 и 17, а такж к первому входу элемента ИЛИ 18. Вт ой режимный выход блока 5 управления оединен со вторым входом элемента ЛИ 18, выход которого через ограниитель длительности 9 подключен к нуевому входу первого управляющего триггера 7, чей нулевой выход связан со BTopfcjMH входами элементов И 14 и 15. Третий режимный выход блока 5 управления подключен ко вторым входам элементов И 11, 13 и 16. Выходы элементов И 10 и 11 связаны соответственно с суммирующим и вычитаю1дим входами счетчика 21, выход которого через анализатор 26 нуля подключен к первому управляющему входу блока 5 управления. Выходы элементов И 12 и 13 связаны через элемент ИЛИ 19 со входом счетчика 22, чей выход через анализатор 27 нуля подключен ко второму управляющему входу блока 5 управления и к единичному входу триггера 8. Выход элемента И 14 связан со входом счетчика 23. Выходы элементов И 15 и 16 связаны через эле- мент ИЛИ 20 с суммирующим входом счетчика 24, чей вычитающий вход.соединен с выходом элемента И 17. Выход счетчика 24 через анализатор 28 нуля подключен к третьему управляющему входу блока 5 упра вления, к первому входу элемента И 13 и к единичному входу триггера 7. Разрядные выходы счетчика 23 через блок 25 вентилей связан с разрядными входами счетчика 24, а командный вход блока 25 вентилей соединен с командным выходом блока 5 управления. Единичный выход триггера 8 подключен к первому входу элемента И 17 (цепи начальной установки всех счетчиков и триггеров не показаны). Измеритель работает следующим образом. На выходе фазового измерителя 1 деформации формируются импульсы, длительность которых Т соответствует величине фазового сдвига сигналов датчиков деформации и пропорциональна отношению угла закручивания вала при передаче крутящего момента Мкр к угловой скорости вращения вала и. Период следования этих импульсов равен То и определяется расстоянием между двумя соседними зубьями индукторов датчиков деформации. Процесс определения мощности устройства состоит из трех режимов: Р1 - измерение; Р2 - коррекция; РЗ - вычисление. в режиме Р1 на первом режимном выходе блока 5 управления ..формируется разрешающий потенциал, поступающий на вторые входы элементов И 10, 12 и 17, а также через элемент ИЛИ 18 и ограничитель длительности 9 ,на нулевой вход триггера 7, с нулевого выхода которого подается разрешающий потенциал на вторые входы элементов И 14 и 15. При этом на счетчик 21 по суммирующему входу через элемент И 10 поступают пачки импульсов от задающего . .генератора 3 с числом импульсов в каждой пачке,
равном , где - период следования импульсов от задающего генератора 3j на счетчике 22 поступлением импульсов от задающего генератора 3 через элементы И 12 и ИЛИ 19 формируется время измерения TUSM С, Тр, , где С - емкость счетчика 22.
Одновременно аналогичным образом (через элемент И 14) производится счет времени в счётчике 23, а в счет чике 24 по суммирующему входу через элементы И 15 и ИЛИ 20 осуществляется подсчет импульсов с выхода фазового измерителя 1 деформации с перио,дом следования Tj. Эти импульсы поступают также на вход счетчика б числа зубьев индукторов датчиков деформации. Счетчик 6 настроен та1«им образом, что его переполнение происходит после отсчета числа импульсов (с периодом Та), соответствующего числу зубьев одного индуктора, т.е после каждого полного оборота вала. Начало режима Р1 синхронизируетсн сигналом переполнения счетчика б, поступающим на до по 4J нательный синхронизирующий вход блока 5 управления. Этим-же сигналом триггер 8 устанавливается в нулевое состояние, формируя запретный потенциал на первом входе элемента И 17. В молюнт переполнения счетчика 22 (окончания процесс подсчета импульсов в счетчике 21 не прекращается, а продолжается до завершения режима Р1, которьй оканчивается в момент ближайшего Переполнения счетчика 6.
В процессе реализации режима Р1 устройство работает следующим образом.
Предварительно в счетчик 24 вносится уставка, которая определяет жесткость вала. Эта уставка выбира- ется таким образом, чтобы переполнение счетчика 24 произошло раньше окончания времени измереш1я г отсчитываемого счетчиком 22. В момент переполнения счетчика 24 на выходе анализатора 28 нуля формируется сигнал, поступающий на единичный вход управляющего триггера 7 в результате чего на вторые входы элементов -И 14 и 15 подается запрещающий потенциал и счет импульсов в счетчиках 23 и 24 прекращается, fan как переполнение счетчика 24 произойдет от момента начёта Р1 через время, равно С., Т (С-, - емкость счетчика 24), то в счетчике 23 за это время будет зафиксировано число Cj-T,
а счетчик 24 после переполнения будет в нулевом состоянии. Затем, отсчитав время TUJH, , переполнится счетчик 22 и сигнал с выхода анализато-. ра 27 нуля установит второй управляющий триггер 8 в единичное состояние, в результате чего на первый вход элемента И 17 будет подан разрешающий потенциал и импульсы с дополнительного вьгхода делителя 4 будут поступать на реверсивный вход счетчика 24. Таким образом определяется величина приращения времени измеренияйТщм от момента окончания TUJM ДО момента окончания режима Р1, который завершается при очередном переполнении I счетчика 6, свидетельствующего о прохождении целого числа оборотов вала. При этом переполнении счетчика б сигнал с его выхода поступит на нулевой . вход триггера 8 и на дополнительный 0 синхронизирующий вход блока 5 управления. В результате счет импульсов в счетчике 24 прекратится, где по каналу вычитания /.будет отсчитано
А Тц5и
импульсов, где К, коэффициент деления на дополнительном выходе делителя 4, и разрешаюидай потенциал будет переключен да блоке 5 управлет ния с первого на второй режимный выход, чем обеспечивается переход к режиму Р2. За время реализации режима Р1 на счётчик 21 поступит
(Л Тщи .
пачек импульсов, в результате чего в нем будет зафиксировано следующее число, пропорциональное величине Мкр
,- Т- (Тщн ДТц5„1
Тец . Т, ,
.В режиме Р2 сигнал со второго режимного выхода блока управления через С элемент ИЛИ 18 и ограничитель 9 длительности установит триггер 7 в нулевое состояние, подавая разрешающие потенциалы яа вторые входы элементов И 14 и 15, через которые на вход
счетчика 23 поступят импульсы от задающего генератора 3 с периодом , а на суммирующий вход счетчика 24 импульсы от фазового из.мерителя 1 Деформации с периодом То . При этом, учитывая отсчитанное в режиме Р1 чиспо импульсов в счетчике 24, на нем формируется интервал времени
гп . Д Тщн m
К. 1
40 Одновременно с этим в течение режима Р2 в счетчик 23 поступит дополнительное число импульсов
дТиги Т9
-i
Лп, , Теч Режим Р2 завершится при переполнении счетчика 24, сигнал с выхода которого через анализатор 28 нуля поступит на третий управляющий вход блока 5 управления и на единичный вход триггера 7, запрещая поступле щ импульсов в счетчики 23 и 24. В режиме РЗ реализуется подсчет в счетчике 22 результата числа им-. пульсов, характеризующих величину из меряемой мощности, период следования которых обратно пропорционален угловой скорости (величина которой карактеризуется подсчитанным числом импульсов в счетчике 23), за интервал времени, пропорциональный крутящему моменту MXB С переходом на режим РЗ разрешаюищи потенциал переключается на третий рел имный выход блока 5 управления, подавая сигнал разрешения на вторые входы элементов И И, 13 и ,16. При этом на вычитающий вход счет чика 21 поступают импульсы с основ ного выхода делителя 4 с периодом следования Kj;T ( коэффициент деления). Формируемый счетчиком 21 интервал времени (длительность режима РЗ) равен . Одновременно схемой реализуются циклические действия, заключающиеся в том, что число п +Дп, хранимое в счетчике 23, по сигналу с командного выхода блока 5 управления через блок 25 вентилей пересылается в дополнительном коде в счетчик 24 , .на сугФшрующий вход кото рого через элементы И 16 и ИЛИ 20 поступают серии импульсов от задающего генератора 3 (число импульсов в каждой серии равно п +йп). Сигналы переполнения счетчика 24 посту пают через анализатор 28 нуля на вхо счетчика 22 результата (через элеме ты И 13 и ИЛИ 19) , а на третий управляющий вход Олока 5 управления по которому осуществляется реализация каждого следующего цикла, и описанные действия повторяются. Таким образом, на счетчик 22 результата поступают импульсы с периодом следо вания (п +йп ) Т(,ц в течение времени реализации режима РЗ, равного п, -К,-Т,,, . Режим РЗ завершается ft - при поступлении на первый управляющий вход блока 5 управления сигнала с выхода анализатора 26 нуля, свидетельствующего об обнулении счетчи ка 21. В результате этого число, за фиксированное счетчиком 22 результа та, будет пропорционально мощности, передаваемой вращающимся валом. Использование предлагаемого изме рителя позволит .повысить точность измерения мощности за счет обеспече ния определения величины деформации вала за целое число оборотов последнего, что приводит к устранению погрешности/ определяемой неидентичностью зубьев индукторов и некратно стью времени измерения и периода еле дования импульсоа с выхода фазового измерителя деформации. Формула изобретения Цифровой измеритель мощности, содержащий фазовый измеритель деформации вращающегося вала, блок управления, блок синхронизации в виде последовательно соединенных генератора импульсов и делителя, счетчики определения деформации, угловой скорости и результата измерения, связанные через свои анализаторы нуля с соответствующими управляющими вхо. дами блока управления/ синхронизирующий вход которого соединен с выходом генератора блока синхронизации, блок вентилей -связанными с разрядными входами счетчика угловой скорости, и элементы И и ИЛИ, посредством которых выход делителя блока синхронизации и режимные выходы блока управления соединены с соответствуюгдими счетчик-ами, отличаюийся тем, что, с целью повышения точности измерения, в него введены счетчик числа, зубьев индукторов HSMieрителя деформации, первый и второй управляющие триггеры, ограничитель/ длительности, вспомогательный счетчик, дополнительный элемент ИЛИ и два дЬполнительных элемента И, а счетчик угловой скорости снабжен вычитающим входом, .при этом вход счетчика числа зубьев соединен с измерителем деформации, а выход связан с нулевым входом второго управляющего триггера и дополнительным синхронизирующим входом, блока управления, нулевой вход первого управляющего триггера соединен через ограничитель длительности с выходом дополнительного элемента -ИЛИ,первый и второй входа которого связаны с соответствуюхдами режимными выходами блока у правления, вход вспомогательного счетчика, соединенного выходом с блоком вентилей, связан через один дополнительный элемент И с выходом генератора импульсов блока синхронизации и выходом первого управляющего триггера, причем единичные входы первого и второго управляющих триггеров соединены соот.ветственно с выходом анализатора нуля счетчика угловой скорости и выходом анализатора нуля счетчика результата, а вычитающий вход счетчика угловой скорости через.другой дополнительный элемент И связан с выходом второго управляющего триггера, соответствующим режимным выходом блока управления и дополнительным выходом делителя блока синхронизации. Истрчники информации, принятые во внимание при экрпертизе 1.Арторское свидетельство СССР 690339,.кл. G 01 L 3/24/21.09.77. 2,Авторское свидетельство СССР N5673874,кл.б 01 L 3/2 4,19. 05 . 77 (прототип.. ; 41 1
