1
Изобретение относится к контрольно-измерительной технике и предназначено для измерения мощности, передаваемой вращающимися валами.
Известный измеритель мощности, передаваемой вращающимся валом, содержащий фазовый измеритель деформации, датчик скорости вращений вала и измерительную схему, не обеспечивает требуемой точности измерения 1 }.
Наиболее близким по технической Сущности и достигаемому результату к изобретению является измеритель мощности, содержащий фазовый измеритель деформации, состоящий из упругого вала, с концами базового участка которого связаны два индуктора с сопряженными с периметрическим зазором зубьями, и первого чувствительного элемента, расположенного в зоне зубьев индукторов и соединенного через первый формирователь импульсов с измерительной схемой 2.
Недостатком такого измерителя также является низкая точность измерения, обусловленная зависимостью результата измерения от периодически изменяющихся колебаний круговой скорости вращения вала.
Цель изобретения - повышение точности измерения.
Указанная цель достигается тем, что в измеритель введены последова10тельно соединенные второй чувствительный элемент и второй формирова тель импульсов, выход которого связан с измерительной схемой, причем второй чувствительный элемент сме15щен относительно первого элемента в плоскости перпендикулярной оси ваО ТГ
ла на угол- i, где Z - суммарное число зубьев индукторов, ai - целое 20 нечетное число.
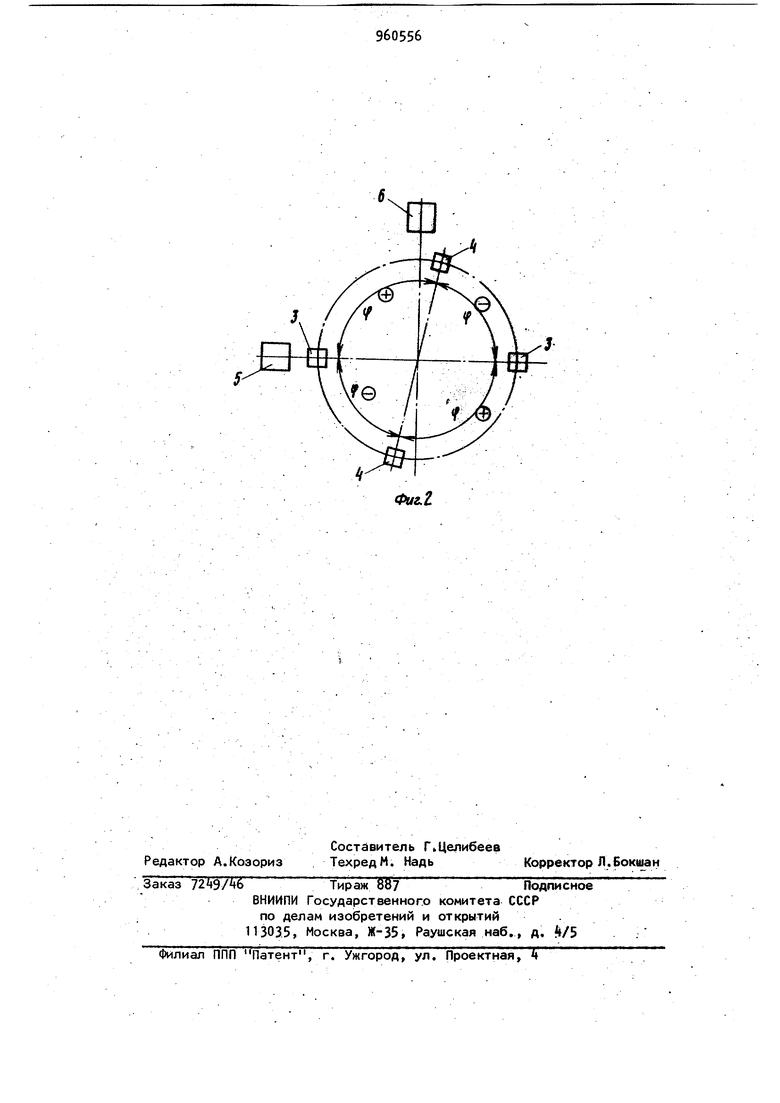
На фиг. 1 представлена функциональная схема предлагаемого измерителя; на фиг. 2 - пример расположения чувствительных элементов в зо не зубье.в индукторов. Измеритель мощности (фиг, 1) содержит вал 1 и вхо/;(ящие в состав фа зового измерителя деформации 2 индукторы 3 и , первый 5 и второй 6 чувствительные элементы, выходы которых соединены соответственно с вх дами первого 7 и второго 8 формирователей импульсов. Одни концы индук торов 3 и 4 закреплены в контрольных сечениях вала 1, а другие концы выполнены в виде дисков с зубья ми и пазами, причем зубья одного индуктора расположены в пазах друго го с периметрическим зазором и взаимодействуют поочередно с двумя чувствительными элементами 5 и 6, которые расположены в зоне зубьев индукторов и смещены относительно друг друга на указанный выше угол в плоскости, перпендикулярной оси в ла (фиг. 2). Измерительная схема 9 состоит из задающего генератора 10, делителя 11 частоты, формирователя 12 синхросигналов, схемы 13 управления, упра ляющих триггеров И и 15, элементов . И 16-21, элементов ИЛИ 22-2%; логической схемы , реверсивного счетчика 26 деформации, счетчика 27 результата, анализаторов 28 и 29 нуля Выход формирователя 7 через первы1 вхсСд измерительной схемы 9 связан со счетным входом первого управ ляющего Триггера И с измерительным входом логической схемы 25. Выход формирователя В .через второй вход измерительной схемы 9 соединен со счётным входом второго управляющего триггера 15. Единичный выход три гера И подключен к первому входу элемента И 17. Единичный выход триггера 15 связан с первыми входами элементов И 1 и 18 и с первым управляодим входом схемы 13 управления. Нулевой выход триггера 15 подключен к первому вхо ду элемента И 20. Нулевой выход три гера.И подключен к первому входу элемента И 19 и к второму упра.вляющему входу схемы 13 управления.
Выход задающего генератора 10 связан с входом формирователя 12 синхроимпульсов и через делитель 11 частоты - с первым входом элемента И 21. Первый выход форми рователя 12 связан с вторыми входами элементов И 17 и 19 и с синхронизирующими вхорезультаты измерении регистрируются схемой, соответственно, со знаками + или -.
При смещении чувствительных элементов на угол i (Z - число зубьев, ,,7,...) каналы одновременно измеряют разноименные времен0
и t
т.е. если в
ные интервалы 64 дами логической схемы 25 и схемы 13 управления, а второй выход формирователя 12 подключен к вторым входам элементов И 18 и 20. Первый командный выход схемы 13 управления подключен к единичному входу триггера 15, а второй командный выход схемы 13 связан с вторым входом элемента И 16, выход которого подключен к нулевому входу триггера 1. Первый и второй режимные выходы схемы 13 управления через элемент ИЛИ 2Ц связаны с третьими входами элементов И 18, 20, третий режимный выход схемы 13 подключен к третьим входам элементов И 17 и 19 и к первому р жимному Входу логической схемы 25, четвертый режимный .выход схемы 13 связан с вторым входом элемента И 21 и с вторым режимным входом логической схемы 25. Выходы элементов И 17 и 18 через элемент ИЛИ 22 подключены к суммирующему входу счетчика 26 реформации, а выходы элементов И 19 и 21 через элемент ИЛИ 23к вычитающему входу счетчика 26. Выход логической схемы 25 подключен к входу счетчика 27 результата. Выходы счетчиков 26 и 27 через свои анализаторы 28 и 29 нуля связаны соответственно с первым и вторым командными входами схемы 13 управления, Цепи начальной установки счетчиков 26 и 27 на фиг. 1 не показаны. Начальная установка индукторов 3 и k друг относительно друга выполнена так, что при всех возможных значенийх крутящего момента М|ср удовлетворяются неравенства (фиг. 2) Поскольку относительные смещения зубьев, вызванные скручиванием вала, обычно невелики, указанные неравенства Легко удовлетворяются. Для определения угла скручивания вала в каждом канале схемы за неизменное время Т,зццрОсуЩествляется измерение целого числа пар временных интервалов t®, t®, отвечающих повороту вала на углы , причем первом канале измеряются - 1-0 втором - t и наоборот. При этом по лезная информация, поступающая по обоим измерительным каналам, суммируется, а погрешности вызванные периодическими изменениями скорости вращения вала 1, вычитаются. Измеритель работает, следующим об разом. При вращении вала 1 зубья индукторов взаимодействуют поочередно с чувствительными элементами 5 и 6. Временные сдвиги между соседними им пульсами (t®, t®) на выходах формирователей 7 и 8 пропорциональны гео метрическим углам (ч®, ) между соответствующими зубьями индукторов При наличии М и возникновения угла скручивания вала 1 взаимное расположение зубьев индукторов 3 и изменяется и происходит относительное смещение импульсов, генерируемых одним и индуктором. При этом изменение разности/ -Ч © однозначно характеризует величину угла скручивания- (деформацию) вала. Процесс определения мощности в предлагаемом устройстве состоит из режимов синхронизации, измерения МНР и измерения мощности. В режиме синхронизации производится измерени двух соседних временных интервалов t® и t® и обеспечивается исходная установка (синхронизация) управляющих триггеров 14 и 15 для получения в режиме измерения М р положительно разности ®-if®), 0. Начало этого режима синхронизировано передним фронтом импульса на единичном выход триггераJ5 (формируемого при прохож дении зуоа индуктора 3 или ч под чу ствительным элементом 6), поступающ го на первый управляющий вход схемы 13 управления. При этом происходит f установка в нуль счетчика 2б, на пе вом режимном выходе схемы 13 управления формируется разрешающий потен циал, который через элемент ИЛИ 24 постуnaef на третьи входы элементов И 18 и 20, на вторые входы которых поступает опорная частота от задающего генератора 10 через формирователь 12. За. интервал времени до про хождения следующего зуба индуктора под чувствительным элементом 6 триг гер 15 сохраняет единичное, состояни элемент И 18 открыт и опорная часто через элементы И 18, ИЛИ 22 поступает на суммирующий вход реверсивно 9 « го счетчика 26, Очередным импульсом с выхода чувствительного элемента 6 и формирователя 8 триггер 15 устанавливается в нулевое состояние в импульсы опорной частоты поступают через элементы И 20, ИЛИ 23 на вычитающий вход счетчик а 26. К моменту начала режима синхронизации, в общем случае триггер 15 может находиться в произвольном состоянии, т.е, период его нахождения в единичном состоянии может соответствовать как t®, так и t®.. Если в режиме синхронизации едия ничному состоянию триггера 15 соотBeTcTByet интервал t®, а нулевому то результат квантования этих интервалов и подсчет соответствующих импульсов реверсивным счетМиком 26 будет положительным () и переполнение счетчика 26 не произойдет. Если же начальное положение триггера 15 таково, что единичному состоянию отвечает t, а нулевому t , то результат счета в сметчике 26 отрицательным (-Ч®+Ч ® 0), рчетчик 26 переполнится и черезанализатор нуля 28 на первый командный вход схемы 13 управления поступит сигнал, по которому с первого командного выхода схемы 13 управления на единичный вход триггеры 15 поступит импульс, переведя его в единичное состояние , чем обеспечивается изменение его фазировки относительно последовательности угловЧ®,ЧЭ, , Ч®,... и положительный знак разности Ч®-Ч 0 при последующих измерениях. Затем импульсом с второго командного выхода схемы 13 управления, поступающим на второй вход элемента И 1б, на первом входе которого находится разрешающий потенциал с единичного выхода триггера 15, триггер 14 устанавливается f f ( Л trt чл ft нулевое состояние и таким образом обеспечивается синхронизация работы обоих каналов измерения - от чувствительных элементов 5 и 6. Режим синхронизации заканчивается после формирования очередного сигнала на единичном выходе триггера 15, поступающего на первый управляющий вход схемы 13 управления. Таким образом, длительность режима синхронизации не превышает интервала времени, равного t®+t®. Режим измерения М,срРеализуется на зафиксированное время Т змер 7. считываемое счетчиком 27, накоторый через логическую схему 25, управ ляемую сигналом с третьего режимного выхода схемы 13 управления, пост пают импульсы с первого выхода формирователя 12 синхросигналов от задающего генератора 10. Перед началом данного режима осуществляется начальная установка счетчиков 26 и 27. Счетчик 27 обеспечивает отсчет времени счетчик 26 вносит ся уставка, пропорциональная углу начальной установки индукторов 3 и . С помощью счетчика 26 осуществляется подсчет числа импульсов, пропорциональных величине деформации вала 1. Информация о величине поступает на счетчик 26 одновременно по двум указанным измерительным каналам. Для исключения дополнительных погрешностей в каждом канале производится измерение целого числа пар интервалов t®, t®. Для этого начало режима измерение тракту чувствительного элемента 6 синхронизировано передним фронтом сигнала с единичного выхода триггера 15, поступающего на первый управ ляющий вход 13 управления, на втором режимном выходе которой фор1 1руется при этом разрешающий потен циал, поступаю1ций через элемент ИЛИ 2k на третьи выходы элементов И 18 и 20.. Начало режима измерение f по тракту чувствительного элемента 5 синхронизировано передним фронтом сигнала с нулевого выхода триггера 1, поступающего на второй управляющий вход схемы 13 управления, на третьем режимном выходе которой в этот момент формируется разрешающий потенциал, поступающий на третьи вх ды элементов И 17 и 1$, Для подсчета импульсов квантования измеряемых временных интервалов по двум измерительным трактам с помощью одного счетчика 26 в схеме измерителя использован формировател 12 синхросигналов, на вход которого поступает частота с выхода задаю щего генератора 10, а на двух его выходах формируются две серии синхроимпульсов, сдвинутых по фазе на п ловину периода квантующей частоты. Импульсы с первого выхода формиро ватёля Ц являются квантующими им6пульсами первого измерительного ка- . канала, а имцульсы с второго выхода квантующими импуль ами второго измерительного канала. Так как квантующие импульсы каждого измерительного канала сдвинуты по фазе на половину периода, то при их поступлении на одноименные или разноименные входы счетчика 26 они просчитываются без потерь. Процесс подсчета разности t -t® в счетчике 26 (в каждом измерительном канале) аналогичен работе схемы в режиме синхронизации. Так как измеряемая разностьЧ -Ч равна сумме угла начальной установки индукторов 3 и Ц и измеряемого угла деформации вала 1, то внесенная в счетчик 26 начальная уставка равная величине угла начальной установки индукторов в дополнительном коде) вычитается и результатом в режиме измерения является величина, пропорциональная только углу.деформации вала 1, т.е. величине крутящего момента . Режим измерения завершается после переполнения счетчика 27 и поступления сигнала через анализатор нуля 29 на второй командный вход схе№ 13 управления, по которому после прихода сигналов с выходов триггеров 1й и 15 на первый и второй управляющие входы схемы 13 управления снимаются разрешающие потенциалы с соответствующих (второго и третьего) режимных выходов схемы 13 управления и подсчет импульсов в счетчике 26 прекращается. Этим обеспечивается завершение режима измерения МНР по каждому измерительному каналу только после реализации подсчета целого числа пар разностей |®-t®. При переходе к режиму измерения мощности на четвертом режимном выходе схемы ,13управления форми1зуется разрешающий потенциал, в результате чего на вычитающий вход счетчика 2б через элементы ИЛИ 23, И 21 и делитель 11 частоты подключаются сигналы 31адающего генератора 10,а на вход счетчика 27 через логическую схему 25 подключаются сигналы от формирователя 7 импульсов чувствительного элемента 5, частота следования которых пропорциональна скорости вращения вала 1. При этом в режиме измерения мощности в счетчике 27 за 9 время, пропорциональное крутящему мо менту, подсчитывается число импульсов, пропорциональное скорости вращения вала, что соответствует измер емой мощности, передаваемой вращающимся валом 1. Данный режим завершается при обнулении счетчика 26 по сигналу, поступающему с выхода анализатора нуля 28 ма первый командный вход схемы 13 управления. При этом разрешаю щий потенциал на четвертом режимном выходе схемы 13 управления снимается и цикл измерения завершается. Использование в измерителе второ го чувствительного элемента, смещен ного oтнocJjтeльнorb первого элемент iJi . на угол - t , позволит повысить то ность измерения за счет снижения по грешности, вызванной периодически повторяющимися при каждом обороте вала изменениями его скорости вращения. Формула изобретения Измеритель мощности, содержащий фазовый измеритель деформации, состоящий из упругого вала, с концами базового участка которого связаны два индуктора с сопряженными с периметрическим зазором зубьями, и первого чувствительного элемента , расположенного в зоне зубьев индукторов и соединенного через первый формирователь импульсов с измерительной схемой, отличающий г/ с я тем, что, с целью повышения точности измерения, в него введены последовательно соединенные второй чу ветви тел элемент и второй .формирователь импульсов, выход которого связан с измерительной схемой, причем второй чувствительный элемент смещен относительно первого элемента в плоскости перпендикулярной оси вала на угол - , где Z - суммарное «1сло зубьев индукторов, а i целое нечетное число. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 711389, кл. G 01 L З/2t, 01.08.77. 2.Авторское свидетельство СССР по заявке № 29W191/18-10 (), кл. G 01 L 3/2ч, 1б.0б.80 (прототип),

| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель мощности | 1983 |
|
SU1093925A1 |
| Измеритель мощности | 1983 |
|
SU1081447A1 |
| Цифровой измеритель мощности на валу | 1980 |
|
SU901860A1 |
| Измеритель мощности | 1988 |
|
SU1527522A1 |
| Цифровой измеритель мощности | 1980 |
|
SU901859A1 |
| Цифровой измеритель мощности | 1978 |
|
SU763705A2 |
| Устройство для измерения углов | 1984 |
|
SU1210055A1 |
| Цифровой измеритель мощности | 1977 |
|
SU673874A1 |
| Адаптивный цифровой частотомер | 1980 |
|
SU917117A1 |
| Дискретный измеритель мощности | 1977 |
|
SU690339A1 |