на датчик 13 исходного положения дви жителя тюбинга, запускается триггер 28, выходной сигнал которого включает коммутатор 39, обеспечивающий прохождение выходного сигнала второго задатчика 26 на первый вход комму татора аналоговых сигналов 22 и далее в управляющую камеру аналогового усилителя давления 40, выход кото- .рого связан с входом пневмодвигателя 41 насосной станции 17. Одновременно выходной сигнал триггера 28 включает гидрораспределитель 8 привода движиИзобретение относится к пневматическим устройствам управления гид- ро- и пневмодвигателями различных грузоподъемных машин и механизмов.
Цель изобретения - расширение функциональных возможностей путем управления тюбинговыми крепеукладчика- ми и повышение производительности кр пеукладчика,
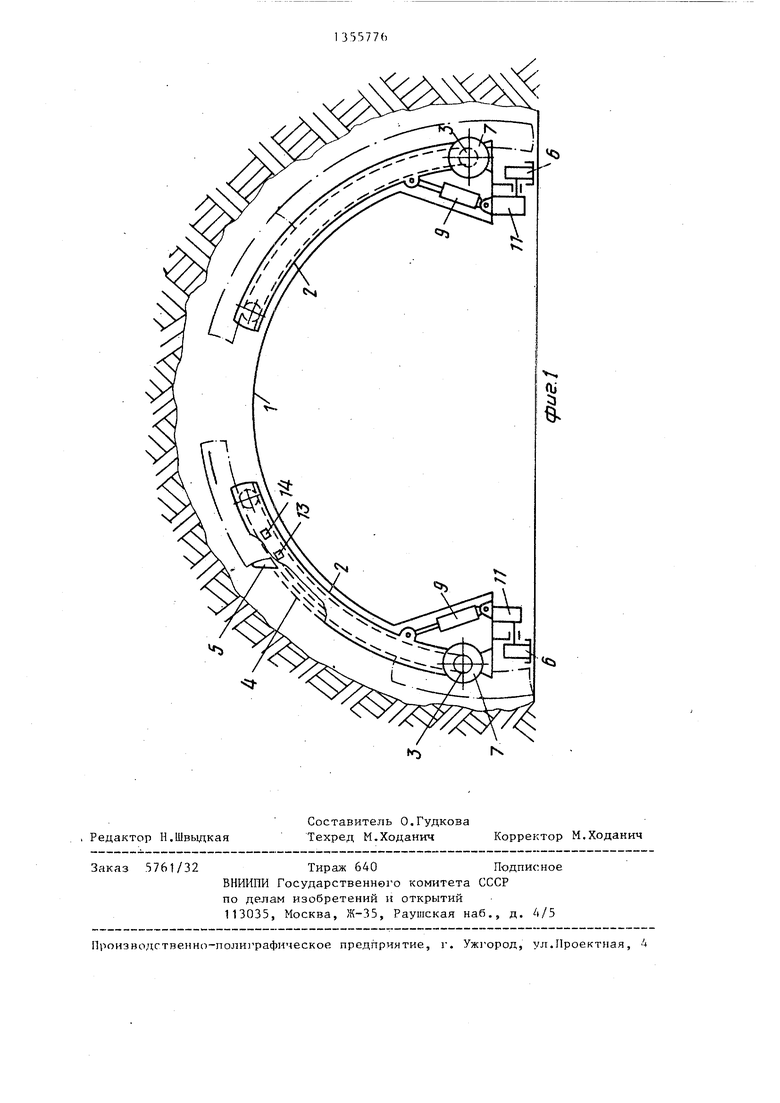
На фиг,1 схематически изображен тюбинговый крепеукладчик, предназначенный для механизации процесса возведения арочной тюбинговой крепи в горных выработках при .комбайновой проходке; на фиг,2 - схема пневмати- ческого устройства управления тюбинговым крепеукладчиком.
Тюбинговый крепеукладчик (фиг,1) состоит из рамы 1 с установленными на ней полушаблонами 2 с возможность их поворота вокруг шарнирного соединения 3, Каждый из полушаблонов 2 снабжен движителем тюбинга, выполненным, например, в виде замкнутой цепи 4 с шарнирно установленным на ней кулаком-упором 5,
Рама 1 снабжена механизмами 6 перемещения.
Пневматическое устройство управ
ления тюбинговым крепеукладчиком
(фиг,2) содержит привод 7 движителя тюбинга с трехпозиционным четырехлинейным распределителем 8, привод 9 поворота полушаблона с трехпозиционным четырехлинейным распределите- лем 10, 11 перемещения рамы с трехпозиционным четырехлинейным
5577fi
теля тюбинга. При этом скорость перемещения движителя тюбинга определяется уровнем выходного сигнала второго задатчика давления 26. Оператор может вмешиваться в автоматический режим и увеличивать скорость перемещения движителя тюбинга воздействием на первый задатчик давления 20, выходной сигнал которого поступает на второй вход коммутатора аналоговых сигналов 22, и в случае превышения сигнала на его первом входе - далее к аналоговому усилителю давления 40. 2 ил.
распределителем 12, датчик 13 исходного положения движителя тюбинга, датчик 14 приема тюбинга, пульт 15 управления, блок 16 управления, мас- лостанцию 17, первый канал 18 питания сжатым воздухом цепей управления и второй канал питания силовой цепи 19,
Выход первого задатчика 20 давления соединен с 15,х:одом элемента 21 сравнения и первым входом коммутатора 22 аналоговых сигналов „Первый выход 23 трехпозиционного переключателя 24 соединен с первым информационным входом двухканального коммутатора 25, каналами питания элемента 21 сравнения, второго задатчика 26 давления, элемента ЗАПРЕТ 27, триггера 28, датчика 13 исходного положения движителя тюбинга и датчика 14 приема тюбинга, а второй выход 25 - с входом многопозиционного переключателя 30, выход 31 которого соединен с первым входом элемента ИЛИ 32, подключенного своим выходом через двух- канальный коммутатор 25 к управляющей камере распределителя 8 привода движителя тюбинга. Выходы 33-37 многопозиционного переключателя 30 соединены соответственно с камерами управления распределителя 10 привода перемещения полушаблона, распределителя 12 привода- перемещения рамы и распределителя 8 привода движителя тюбинга питающие входы которых сооб- щень с напорной магистралью насосной
станции 17, а выходы - с входами гидродвигателей 7,9 и 11,
Выход датчика 13 исходного положения движителя тюбинга соединен с первым входом элемента И 38, прямым входом элемента ЗАПРЕТ 27 и с вторым управляющим входом двухка- нального коммутатора 25, а выход датчика 14 приема тюбинга - с вторым входом элемента И 38, выход которого соединен с инверсным входом элемента ЗАПРЕТ-27 и S-входом триггера 28, R-вход которого подключен к выходу элемента ЗАПРЕТ 27. Выход триггера 28 соединен с вторым входом элемента ИЛИ 32 и управляющим входом одноканального коммутатора 39, информационный вход которого соединен с выходом второго задатчи- ка 26 давления. При этом выход одноканального коммутатора 39 соедине с вторым входом коммутатора аналоговых сигналов 22, подключенного своим выходом к управляющей камере аналогового усилителя 40 давления, выход которого подключен к входу пневмодвигателя 41, кинематически связанного с насосом 42. При этом первый канал 18 питания соединен с входом трехпозиционного переключателя 24, а второй 19 - с входом аналогового усилителя 40 давления.
В исходном состоянии трехпозици- онный переключатель 24 установлен в позиции 43, а многопозиционный переключатель - в позиции 44.
Устройство обеспечивает работу крепеукладчика в двух режимах, ручном и полуавтоматическом.
В ручном режиме устройство работает следующим образом.
Трехпозиционный переключатель 24 (переключатель режимов) устанавливася в позицию 29 (Ручное). При этом подается питание на вход многопозиционного переключателя 30 (переключателя операций). Оператор переводит переключатель 30 в позицию 31, вследствие чего его выходной сигнал через элемент ИЛИ 32, нормально открытый контакт двухканального коммутатора 25 поступает в камеру управления распределителя 8 привода движителя тюбинга. Распределитель 8 переключается, рабочие камеры привода 7 движителю тюбинга соединяются соответственно с напорной и сливной магистралями насосной станции 17, Затем
3557764
оператор первым задатчиком 20 давления формирует аналоговый сигнал, который через коммутатор 22 аналоговых сигналов поступает в управляющую камеру аналогового усилителя 40 давления. Его выходной сигнал, пропорциональный давлению в управляющей камере, поступает на вход пневмодвигате- 10 ля 41 насосной станции 17, При этом заданному давлению нагрузки насоса 42 и давлению в управляющей камере аналогового усилителя 40 давления соответствует определенная частота вра- 15 щения пневмодвигателя 41, а следовательно, и определенная подача насоса 42. Изменением давления в управляющей камере аналогового усилителя 40 давления при постоянном давлении 20 нагрузки насоса 42 можно пропорционально изменять подачу насоса 42, а следовательно, и скорость привода 7 движителя тюбинга, подключенного через распределитель 8 к напорной и 25 сливной магистралям насосной станции . 17.
Таким образом, наблюдая визуально за перемещением движителя тюбинга, оператор устанавливает кулак-упор 5 30 в исходное положение. При помощи крепедоставщика (не показан) тюбинг подается на полушаблон 2 до упора в кулак-упор 5. Воздействуя на первый задатчик давления 20, оператор транспортирует тюбинг до упора в почву, выработки или ранее уложенный.тюбинг. Процесс повторяется до полной загрузки полушаблонов. Управление приводом 9 перемещения полушаблона и приводом 11 перемещения рамы производится установкой многопозиционного переключателя 30 соответственно в позиции 33, 34 и 35, 36 и воздействием-на первый задатчик 20 давления,
В полуавтоматическом режиме работы загрузка полушаблонов 2 тюбингами производится автоматически.
Для этого Трехпозиционный переключатель 24 переводится в позицию 23 (Автомат). При этом первый канал 18 питания коммутируется с первым информационным входом двухканального коммутатора 25, каналами питания второго задатчика 26 давления, элемента 5g ЗАПРЕТ 27, тригг.,ера 28, датчика 13
35
40
45
50
исходного положения движителя тюбинга и датчика 14 приема тюбинга. Оператор первым задатчиком 20 давления формирует аналоговый сигнал, который поступает на вход элемента 21 сравнения, выполненного с пружиной задания уровня срабатывания, при этом на его выходе по достижении порога срабатывания устанавливается единичный сигнал, который поступает на первый управляющий вход двухка- нального коммутатора 25 и переключает его. На выходе двухканального ком-ю Движитель транспортирует тюбинг к месмутатора 25 формируется единичный сигнал, который переключает распределитель 8 привода движителя тюбинга 7. Кроме того, аналоговый сигнал с вьрсода задатчика 20 поступает через коммутатор аналоговых сигналов 22 в управляющую камеру аналогового усилителя 40 давления и включает насосную станцию 17. Движитель тюбинга при этом перемещается до момента срабатывания датчика 13 исходного положения движителя тюбинга, выходной сигнал которого поступает на первый вход элемента И 38 и второй управляющий вход Двухканального коммутатора 25 и снимает сигнал с управляющей камеры распределителя 8, который занимая нейтральное положе35
40
асосной станции 17 от привода двиителя тюбинга 7. Привод 7 останавлиается, движитель тюбинга готов к риему, тюбинга. Затем крепедоставщи- ом тюбинг подается к движителю до упора в кулак-упор 5 и воздействует на датчик 14 приема тюбинга, с выхода которого поступает сигнал на . второй вход элемента И 38.Выходной сигнал элемента И 33 поступает на инверсный вход элемента.ЗАПРЕТ 27 и S-вход триггера 28 и включает его. Выходной сигнал триггера 28 через элемент ИЛИ 32 поступает на второй информационный вход двухканального коммутатора 25, на выходе которого устанавливается единичньй сигнал, включающий распределитель 8. Кроме того, выходной сигнал триггера 28 поступает на управляющий вход однока- нального коммутатора 39, который обес-gQ печивает прохождение выходного сигнала второго задатчика давления 26 на второй вход коммутатора аналоговых сигналов 22 и далее - в управляющую камеру аналогового усилителя 40 давления. Его выход соединен с входом пневмодвигателя 41 насосной станции 17. Движитель тюбинга начинает перемещаться со скоростью, пропор30
45
55
циональной уровню выходного сигнала второго задатчика 26 давления, который устанавливается предварительно. При смещении движителя с тюбингом с исходного положения прекращается воздействие на датчики исходного положения и приема тюбинга, на выходах которых устанавливаются нулевые сигналы.
5
0
gQ
ту установки, сбрасывает его и продолжает движение по замкнутой траектории до прихода кулака-упора 5 в исходное положение. Срабатывает дат5 чик-13 исходного положения движителя тюбинга. Его выходной сигнал поступает на прямой вход элемента ЗАПРЕТ 27, выходной сигнал которого выключает триггер 28. Снимается управляющий сиг0 нал с одноканального коммутатора 39. Управляющая камера аналогового усилителя 40 давления через коммутатор 27« аналоговых сигналов сообщается с атмосферой. Двигатель 41 останавливает5 ся, прекращается подача насосной станции 17, останавливается привод движителя тюбинга 7. Кроме того, управляющая камера распределителя 8 через двухканальный коммутатор 25, элемент
0 ИЛИ 32 и многопозиционный переключатель 30 также сообщается с атмосферой. Распределитель В, занимая нейтральное положение, отключает напорную магистраль насосной станции 17 от привода движителя тюбинга 7. Цикл завершен. Устройство готово к приему следующего тюбинга.
В случае необходимости увеличения скорости перемещения движителя тюбинга оператор может вмешиваться в автоматический режим загрузки, воздействуя на первый задатчик 20 давления. При этом с его выхода сигнал поступает на первый вход коммутатора 22 аналоговых сигналов. Как только этот сигнал превысит уровень сигнала, формируемого вторым задатчиком 26 давления, он поступает в - управляющую камеру аналогового усилителя 40 давления и таким образом увеличивает подачу насосной станции 17, а следовательно, скорость перемещения движителя тюбинга.
Использование в данном устройстве датчиков исходного положения-дни- жителя и приема тюбингов, второго задатчика давления, двухканального и одноканального коммутаторов. Коммутатора аналоговых сигналов, логи45
55
ческих элементов И, ЗАПРЕТ и триггера позволяет обеспечить режим автоматической укладки тюбингов, а также оперативно вмешиваться в управление крепеукладчиком в автоматическом режиме путем увеличения скорости перемещения движителя тюбинга, что расширяет функциональные возможности устройства и обеспечивает повышение производительности крепеукладчика.
Формула изобретения
Пневматическое устройство управления многоприводным агрегатом, содержащее пульт с установленными на нем многопозиционным переключателем, первым задатчиком давления и трехпо- зиционным переключателем, вход которого соединен с первым каналом питания, пневмодвигатель насосной станции, трехпозиционные четырехлинейные распределители, аналоговый усилитель давления, выход которого соединен с входом пневмодвигателя насосной станции, а вход - с вторым каналом питания, гидродвигатели исполнительных механизмов, блок управления, состоящий из элемента ЗАПРЕТ, элемента ИЛИ и элемента сравнения, элемент сравнения выполнен с пружиной задания уровня срабатывания, причем выходы многопозиционного переключателя соединены с камерами управления трехпозиционных четырехлинейных распределителей, питающие входы которых сообщены с напорной магистралью насосной станции, а выходы - с входами гидродвигателей исполнительных механизмов, при этом первый задатчик давления подключен своим выходом к входу элемента сравнения, отличающееся тем, что, с целью расширения функциональных возможностей путем управления тюбинговым крепеукладчиком и повьппения прозводительности крепеукладчика, устойство снабжено приводом движителя тюбинга и подключенным камерой управения к одному из выходов многопозиионного переключателя трехпозицион- ым четырехлйнейным распределителем.
0
5
0
5
0
5
0
5
0
выходы которого сообщены с входами npir вода движителя тюбинга, а также датчиком приема тюбинга и датчиком исходного- положения движителя тюбинга, в блок управления установлены, двухка- нальный и одноканальный коммутаторы, коммутатор аналоговых сигналов, элемент И, триггер с раздельными входами и второй задатчик давления,причем пер- вый выход трехпозиционного переключателя соединен с первым информационным входом двухканального коммутатора, каналами питания элемента сравнения, второго задатчика давления, элемента ЗАПРЕТ, триггера, датчика исходного положения движителя тюбинга и датчика приема тюбинга, а второй выход - с входом многопозиционного переключателя, один из выходов которого соединен с первым входом элемента ПЛИ, подключенного своим выходом к второму информационному входу двухканального коммутатора, выход которого соединен с другой камерой управления трехпознционного четырех- линейного распределителя привода движителя тюбинга, при этом выход первого задатчика давления связан с первым входом коммутатора аналоговых сигналов, выход элемента сравнеЕшя соединен с первым управляющим входом двухканального коммутатора, а выход , датчика исходного положения движителя тюбинга - с вторым управляющим входом двухканального коммутатора, первым входом элемента П и прямым входом элемента ЗАПРЁТ, при этом выход датчика приема тюбинга соединен с вторым входом элемента И, подключенного своим выходом к инверсному входу элемента ЗАПРЕТ и S-входу триггера, R-вход которого соединен с выходом элемента ЗАПРЕТ, а выход - с вторым входом элемента ИЛИ и управляющим входом одноканального коммутатора, информационный вход которого соединен с выходом второго задатчика давления, выход - с вторым входом коммутатора аналоговых сигналов, а гидродвигатели исполнительных механизмов являются приводами поворота полушаблона и перемещения рамы.
ча
Ci
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования уровня жидкости в резервуаре | 1985 |
|
SU1298724A1 |
| Пневматическое устройство для дистанционного управления грузоподъемной машиной | 1985 |
|
SU1286832A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство управления режимами работы выемочного агрегата | 1985 |
|
SU1240893A2 |
| Устройство управления режимами работы выемочного агрегата | 1983 |
|
SU1137200A1 |
| Гусеничный трактор | 1987 |
|
SU1446017A2 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Многоканальная электрогидравлическая система | 1989 |
|
SU1707289A1 |
| Устройство для автоматического управления приводами насосных агрегатов многоступенчатой гидротранспортной трубопроводной установки | 1982 |
|
SU1104083A1 |
| Электрогидравлическая система совмещенного управления | 1988 |
|
SU1548363A1 |
Изобретение относится к устройствам управления горными машинами, предназначенными для возведения тюбинговой арочной крепи при комбайновой проходке капитальных горных выработок в условиях повышенной взрыво- опасности. Устройство обеспечивает 5 .11 7 расширение функциональных возможностей путем управления тюбинговым кре- пеукладчиком и повышение производительности за счет введения автоматического режима укладки тюбингов в полушаблоны крепеукладчика. Устройство содержит пульт управления 15 с переключателем режимов работы Ручное- Автомат, переключателем 30 операций и первым задатчиком 20, датчик 13 исходного положения движителя тюбин га, датчик 14 приема тюбинга, масло- станцию 17, управляемые гидрораспределители 8,10,12, привод 7 движителя тюбинга, привод 9 перемещения полушаблонов, привод 11 перемещения рамы и блок управления 16. Устройство может работать в ручном и полуавтоматическом режимах. В автоматическом режиме тюбинг воздействует на датчик 14 приема тюбинга, а движитель тюбинга с кулаком-упором воздействует I (Л 10 77 00 СП СП vj 05
Редактор Н.Швыдкая
Составитель О.Гудкова Техред М.Ходанич
Заказ 5761/32Тираж 640Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.Проектная, 4
Корректор М.Ходанич
| Авторское свидетельство СССР по заявке № 3848080/24,кл.Р 15 В 11/20, 1985. |
