устройство и автоколлимационную измерительную систему, включающую автоколлиматор и кольцевое зеркало, укрепленное на торце ротора гиродвигателя, дополнительно введено жестко скрепленное с корпусом чувствительного элемента зеркало, причем угол между нормалями к отра каюи;им поверхностям кольцевого п дополнительного зеркал не превышает поля зрения автоколлиматора.
Кроме того, для достижения поставленной цели на корпусе гирокомпаса между автоколлиматором и кольцевым зеркалом, укрепленным на роторе гиродвигателя, размещена подвижная щторка.
Шторка может быть связана тягой с арретнрующим устройством гирокомпаса.
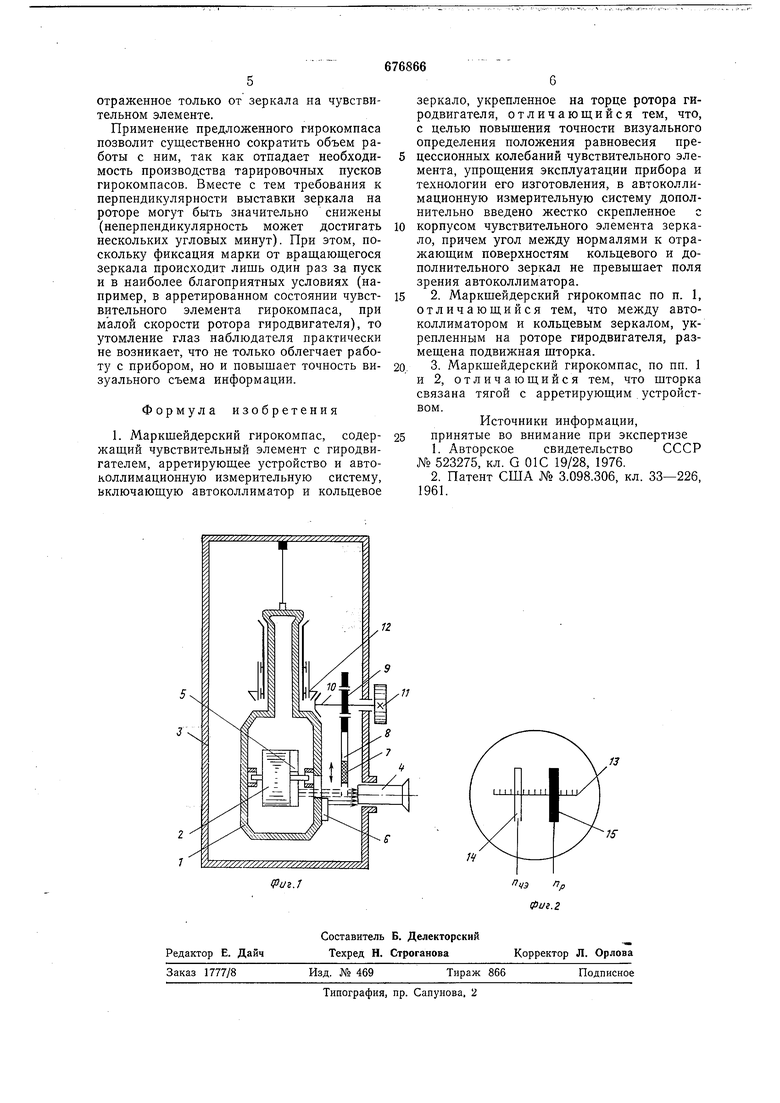
На фиг. 1 схематично изображен предлагаемый маркщейдерский гирокомпас; на фиг. 2 - изображение, наблюдаемое в поле зрения автоколлиматора.
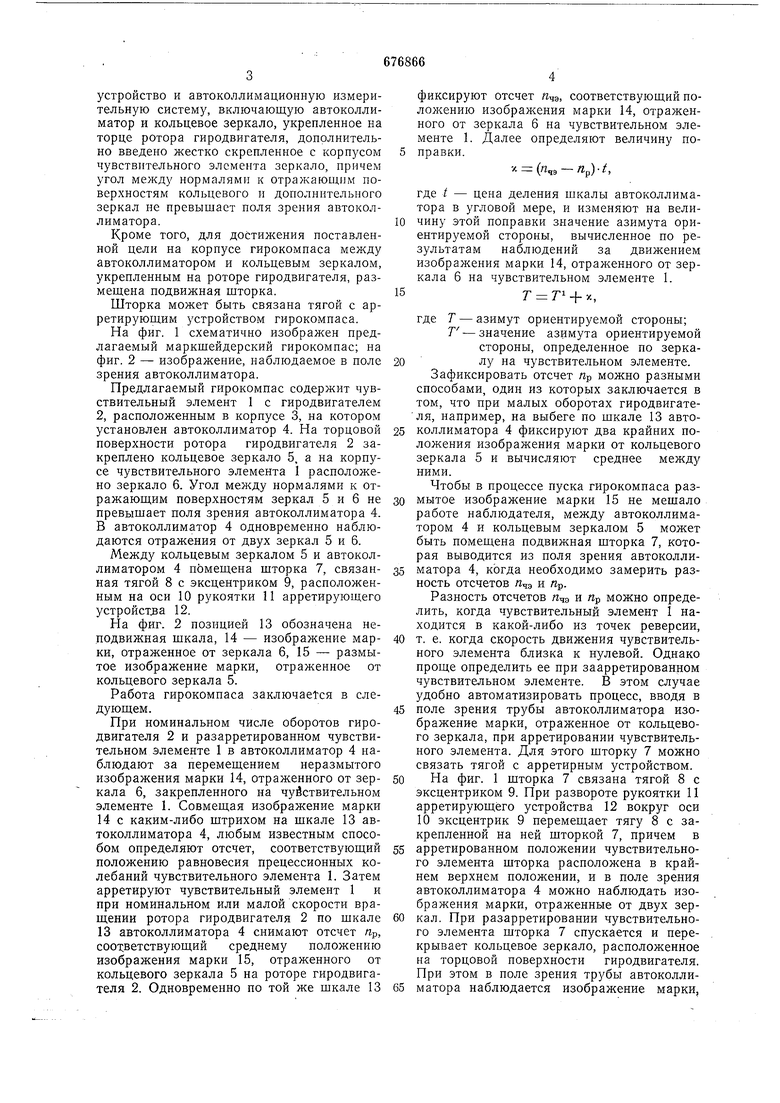
Предлагаемый гирокомпас содержит чувствительный элемент 1 с гнродвигателем 2, расположенным в корпусе 3, на котором установлен автоколлиматор 4. На торцовой поверхности ротора гнродвигателя 2 закреплено кольцевое зеркало 5, а на корпусе чувствительного элемента 1 расположено зеркало 6. Угол между нормалями к отражающим поверхностям зеркал 5 и 6 не превышает поля зрения автоколлиматора 4. В автоколлиматор 4 одновременно наблюдаются отражения от двух зеркал 5 и 6.
Между кольцевым зеркалом 5 и автоколлиматором 4 помещена шторка 7, связанная тягой 8 с эксцентриком 9, расположенным на оси 10 рукоятки 11 арретирующего устройст.ва 12.
На фиг. 2 позицией 13 обозначена неподвижная шкала, 14 - изображение марки, отраженное от зеркала 6, 15 - размытое изображение марки, отраженное от кольцевого зеркала 5.
Работа гирокомпаса зaключaetcя в следующем.
При номинальном числе оборотов гиродвигателя 2 и разарретированном чувствительном элементе 1 в автоколлиматор 4 наблюдают за перемещением неразмытого изображения марки 14, отраженного от зеркала 6, закрепленного на чуйствительном элементе 1. Совмещая изображение марки 14 с каким-либо штрихом на шкале 13 автоколлиматора 4, любым известным способом определяют отсчет, соответствующий положению равновесия прецессионных колебаний чувствительного элемента 1. Затем арретируют чувствительный элемент 1 и при номинальном или малой скорости вращении ротора гиродвигателя 2 по шкале 13 автоколлиматора 4 снимают отсчет Пр, соответствующий среднему положению изображения марки 15, отраженного от кольцевого зеркала 5 на роторе гиродвигателя 2. Одновременно по той же шкале 13
фиксируют отсчет Пчэ, соответствующий полол ению изобрал ения марки 14, отраженного от зеркала 6 на чувствительном элементе 1. Далее определяют величину поправки.
X ( - «р) А
где t - цена деления шкалы автоколлиматора в угловой мере, и изменяют на величину этой поправки значение азимута ориентируемой стороны, вычисленное по результатам наблюдений за движением изображения марки 14, отраженного от зеркала 6 на чувствительном элементе 1.
т Т + ,
где Т - азимут ориентируемой стороны; Т - значение азимута ориентируемой стороны, определенное по зеркалу на чувствительном элементе.
Зафиксировать отсчет % можно разными
способами, один из которых заключается в
том, что при малых оборотах гиродвигателя, например, на выбеге по шкале 13 автоколлиматора 4 фиксируют два крайних положения изображения марки от кольцевого зеркала 5 и вычисляют среднее между ними.
Чтобы в процессе пуска гирокомпаса размытое изображение марки 15 не мешало работе наблюдателя, между автоколлиматором 4 и кольцевым зеркалом 5 может быть помещена подвижная шторка 7, которая выводится из поля зрения автоколлиматора 4, когда необходимо замерить разность отсчетов Лчэ и %.
Разность отсчетов и % можно определить, когда чувствительный элемент 1 находится в какой-либо из точек реверсии,
т. е. когда скорость движения чувствительного элемента близка к нулевой. Однако проще определить ее при заарретированцом чувствительном элементе. В этом случае удобно автоматизировать процесс, вводя в
поле зрения трубы автоколлиматора изображение марки, отраженное от кольцевого зеркала, при арретировании чувствительного элемента. Для этого шторку 7 можно связать тягой с арретирным устройством.
На фиг. 1 шторка 7 связана тягой 8 с эксцентриком 9. При развороте рукоятки 11 арретирующего устройства 12 вокруг оси 10 эксцентрик 9 перемещает тягу 8 с закрепленной на ней щторкой 7, причем в
арретированном положении чувствительного элемента шторка расположена в крайнем верхнем положении, и в поле зрения автоколлиматора 4 можно наблюдать изображения марки, отраженные от двух зеркал. При разарретировании чувствительного элемента шторка 7 спускается и перекрывает кольцевое зеркало, расположенное на торцовой поверхности гиродвигателя. При этом в поле зрения трубы автоколлиматора наблюдается изображение марки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Угломерное устройство для наземного гирокомпаса | 1975 |
|
SU522413A1 |
| Угломерное устройство для наземного гирокомпаса | 1976 |
|
SU579544A2 |
| Чувствительный элемент гирокомпаса | 1983 |
|
SU1101676A1 |
| Датчик углового положения ротора гироскопа | 1973 |
|
SU468089A1 |
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| Маркшейдерский гирокомпас | 1990 |
|
SU1808119A3 |
| Оптический датчик углового положения ротора гироскопа | 1973 |
|
SU523275A1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| Способ фокусировки телескопического объектива и устройство для его осуществления | 1990 |
|
SU1760423A1 |
| Способ определения погрешностей изготовления прямых двугранных углов зеркально-призменных элементов и устройство для его осуществления | 1977 |
|
SU693110A1 |
