В настоящее время в авиации получили распространение дистанционные электрические тахометры двух типов:
1)тахометр переменного тока с датчиком однофазным синхрончым генератором и указателем - вольтметром;
2)дистанционный магнитный тахометр с датчиком трехфазным синхронным генератором и указателем, содержащим синхронный моторчик и магнитный тахометр.
Прибор первого типа недостаточ-но точен. Во втором приборе затруднительно изменение диапазона измерений. Оба имеют недостаток - малый устанавливающий момент, что затрудняет использование в системе автоматических регулирующих устройств.
Предлагаемый дистанционный электрический тахометр обеспечиза. ет получение на оси указателя значительного вращающего момента, отличается высокой чувствительпостью и надежностью действия, удобной регулировкой и установкой раз-личных диапазонов измерения. Температурная стабилизация может выполняться обычными методами.
Тахометр выполнен по типу известных дистанционных электрических тахометров с датчиком двухфазным .генератором и с приемником - двухфазным фазометром, обмотки
которого присоединены к обмоткам датчика через различные сопротивления. Новизна его заключается в том, что одна из обмоток приемника присоединена непосредственно к одной фазе датчика, а другая - к другой фазе через последовательный резонансный контур с переменной настройкой. При этом орган управления настройкой контура может быть механически связан с осью фазометра. Такое применение резонан. сного контура повыщает чувсгвительность прибора.
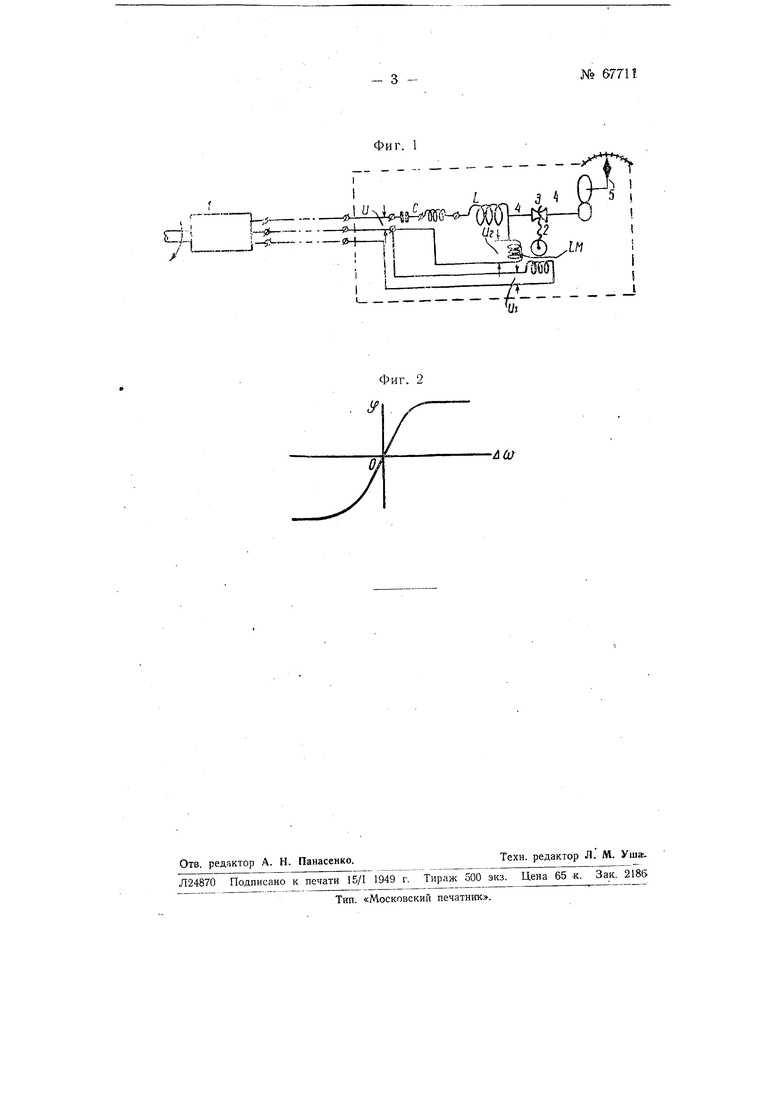
Для пояснения дан чертеж, на фиг. 1 которого изображена электрическая схема предлагаемого тахометра, а на фиг. 2 - пояснительная диаграмма.
Как указывалось выше, датчиком является двухфазный синхронный генератор /.В указателе имеется последовательный резонансный контур CL, в состав которого входит и индуктивность одной из фаз двухфазного фазометра-приемника 2, представляющего собой асинхронный двигатель. Вторая фаза фазометра питается непосредственно от генератора. Двигатель 2 через редуктор 5 перемещает подвижной элемент, служащий для плавного изменения индуктивности или емкости контура.
Принцип действия прибора заключается в следующем.
Напряжение L, подводимое к одной из обмоток двигателя, имеет постоянную фазу. При резонансе нагрузка для другой цепи, идущей от датчика, носит чисто активный характер, тогда как напряжение U в этой цепи сдвинуто по фазе по отношению к Ui на 90°:
,
Следовательно, напряжение LJ., на второй обмотке двигателя совпадает по фазе с Ui:
f -;r К
jaUi . , ,, y.;.L, , . ..
При этом ротор двигателя 2 неподвижен.
При всяком отклонении на величину Д ш частоты напряжения от резонансной частоты контура баланс фаз нарушается вследствие изменения фазы 9 напряжения Uz. Фаза изменяется в соответствии с кривой на фиг. 2. В зависимости от знака изменения ротор двигателя приходит во враш,ение в правом или левом направлении, перемещая ось 4 и элемент, изменяющий индуктивность L или емкость С контура до тех пор, пока вновь не наступит резонанс.
Каждому значению частоты, т е. скорости врапХения ротора датчика генератора, соответствует определенное устойчивое положение оси 4.
,С этой осью через соответствующую передачу связывается стрелка 5, показывающая по шкале любой протяженности значение измеряемой величины. Значительная величина вращающего момента позволяет ари водить от той же оси элементы авторегулирующей аппаратуры.
Сокращение, расширение или смена диапазона измерения производится подключением в контур по-стоянных индук-тивностей или емкостей.
Предмет изобретения
1.Дистанционный электрический тахометр, в котором двухфазный генератор-датчик, число оборотов; которого равно или пропорционально измеряемой скорости, питагт двухфазный фазометр-приемник, обмотки которого присоединены к обмоткам датчика через различные сопротивления, отличающий: я тем, что одн-а, из обмоток приемника присоединена непосредственно к одной фазе датчика, и другая - к другой фазе через последовательный резонансный контур с переменной настройкой.
2.Форма выполнения тахометра по п. 1, отличающаяся тем, что фазометр-приемник механически связан со стрелкой указателя оборотов и с орган-ом управления настройкой резонансного контура.
Фиг.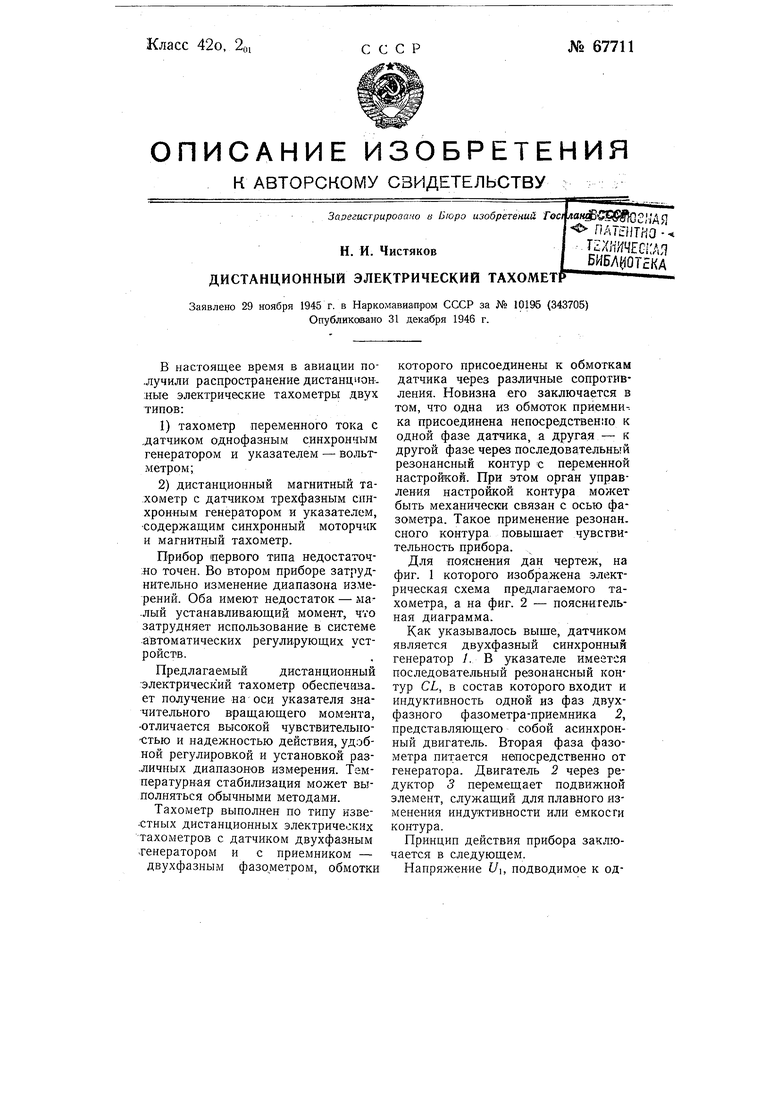

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла поворота | 1943 |
|
SU67547A1 |
| СИНХРОННЫЙ АГРЕГАТ | 1991 |
|
RU2076437C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Ротационный электровискозиметр | 1982 |
|
SU1055995A1 |
| Способ регулирования датчика угловых перемещений | 1989 |
|
SU1781672A1 |
| Устройство для дистанционной передачи скорости вращения | 1961 |
|
SU148735A1 |
| Устройство для дистанционной передачи углового перемещения | 1985 |
|
SU1275512A1 |
| УСТРОЙСТВО ГРУППОВОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ШИНАХ ЭЛЕКТРОСТАНЦИИВСЕСОЮЗНАЯ | 1971 |
|
SU316170A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕННОГО УЧАСТКА ЭЛЕКТРИЧЕСКОЙ СЕТИ | 1973 |
|
SU375594A1 |
| Устройство для дистанционного измерения линейных перемещений | 1979 |
|
SU877318A2 |
Фиг. 2
&Ш
