(54) НАКЛОНОМЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания наклономеров | 1977 |
|
SU731291A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Устройство для определения угла наклона объекта | 1978 |
|
SU767516A1 |
| Устройство для контроля наклономеров | 1990 |
|
SU1788437A1 |
| Электролитический датчик горизонта | 1977 |
|
SU646198A1 |
| Устройство для испытаний наклономеров | 1978 |
|
SU763685A1 |
| ДАТЧИК УГЛОВ НАКЛОНА ОБЪЕКТА | 2007 |
|
RU2330241C1 |
| Волоконно-оптический инклинометр | 2024 |
|
RU2831930C1 |
| Способ определения углового положения объекта | 1990 |
|
SU1760317A1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
Изобретение относится к измерительной технике, а именно к прецизионным измерителям угла наклона оснований относительно горизонта.
Известные наклономеры, содержащие частично заполненную электролитом ампулу и злектро- 5 ды, вклн)че1шые в мостовую измерительную схему, характеризуются низкой точностью из-за отсутствия цепи отрицательной обратной связи 1. .10
Известны также наклономеры с электролитическими преобразоватёлями,включенными в мостовую схему и цепь обратной связи 2 и 3.
По технической сущности к предлагаемому наклономеру наиболее близко устройство, содер-15 жащее корпус с расположенным Б нем датчиком горизонта в виде заполненной электролитом ампулы с электродами, включенными в мостовую схему и цепь обратной связи 3.
Однако такое устройство не обеспечивает 20 требуемой точности вследствие нелинейности характеристикисилового датчика цепи обратной связи.
Целью изобретения является повышение точноста устройства путем снижения погрешности линейности статической характеристики.
Цель достигается тем, что в наклономер, содержащий корпус с расположенным в нем датчиком горизонта в виде частично заполненной электролитом ампулы с электродами, включенными в мостовую схему и цепь обратной связи, введены преобразователь линейного перемещения датчика горизонта в его угловое перемещение относительно корпуса, выполненный, например, в виде двух наклонных к горизонту плоскостей, контактирующих через опоры скольжения с датчиком горизонта, и измеритель линейных перемещений датчика горизонта относительно корпуса, а цепь обратной связи выполнена в виде задемпфированного датчика силы, подключенного через усилитель к мостовой схеме.
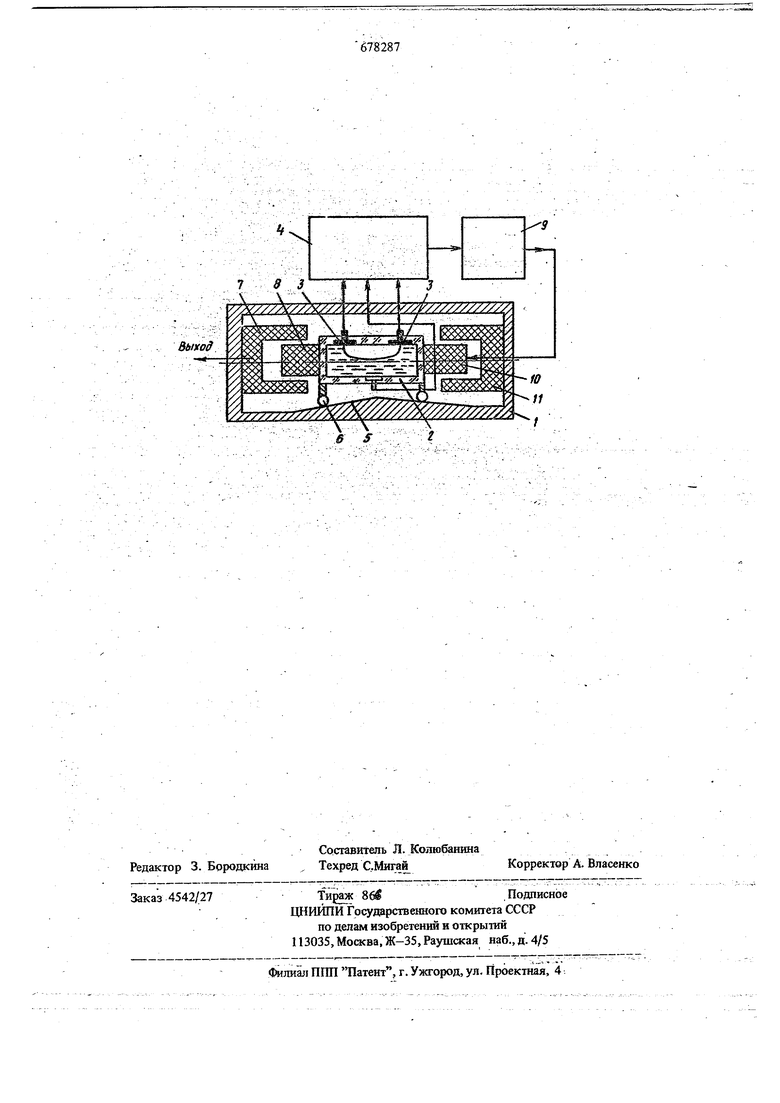
На чертеже схематически изображен предлагаемый наклономер.
Наклономер содержит корпус 1, в котором расположен датчик горизонта в виде заполненной электролитом ампулы 2 с электродами 3, включенными в мостовую схему 4 переменHoro тока, преобразователь линейного перемещения датчика горизонта в его угловое перемещение отаосительно корпуса 1, выполненный в виде двух наклонных к горизонту плоскостей 5, контактирующих через опоры 6 скольжения с датчиком горизонта, измеритель линейных перемещений датчика горизонта относительно корпуса 1 в виде неподвижного статора 7 и скрепленного с ампулой ротора 8. Выход мостовой схемы через усилитель 9 подключен к датчику силы, состоящему из скрепленного с ампулой ротора 10 и неподвижного статора 11.
Наклономер работает следующим образом.
В исходном положении ампула располагается в корпусе так, что электролит наполовину омы вает верхние электроды, размещенные на поверхности с большим радиусом кривизньь Благодаря тому, что электролитические сопротивг ления между нижним и верхним электродами равны, сигналы на выходах мостовой схемы и усилителя 9 равны нулю.. -
Датчик силы (например, магнитоэлектрического типа) не оказывает Силового воздействия; ш ампул, (Жгнал на вькоде датчика перемещений равен нулю. Наклон корпуса вызывает перемещение электролита относительно верзсних электродов, что,пр1шодит к разбалансировке мостовой схемы. Сигнал управления с последней по цега обратной связи через усилитель и датайк силь перемеЙ1ает ампулу вдоль ее осидо тех пор, пока угол наклона ампулы, вызванный ее перемещением по плоскостям преобразователя линейных перемещенш ампулы в угловое перемещение, не скомпенсирует угол наклона корпуса. В результате ампула займет новое положение равновесия относительно корпуса, при котором электролит снова наполовину будет омывать верхние электроды, а шгнал управлещш положением ампулы будет равен нулю. При этом выходной сигнал прецизионного датчика перемещений будет пропорщюнален углу наклона корпуса. Коэффициент преобразо.вакия наклономера равен коэфф|циенту передачи преобразователя линейных перемещений ампулы в ее угловое отклонение и составляет
2 а
рад
К
мм
где У - измеряемый угол наклона корпуса; X - линейное перемещение ампулы, необходимое для компенсации угла наклона корпуса;
а - угол наклона плоскости к горизонту;
Н - расстояниё между опорами скольжения.
Необходимьш запас устойчивости компенсационной измерительной схемы наклономера обеспечивается заполнением корпуса демпфирующей жидкостью. Компенсатор о&ьемного расщирения жидкости (например, сильфонного 1ипа) на чертеже не показан.
Преобразователь, линейных перемещений ампулы в ее угловое перемещение может бьггь выйолнён в виде цилйвдрической поверхности
больщего радиуса (вместо наклонных плоскостей 5) и притертых к ней опор скольжения, скрепленных с ампулой.
Благодаря введению в наклономер преобразователя линейного перемещения датчика горйзонта в его угловое перемещение относительно корпуса, который вьшолнен, например, в виде двух наклейных к го ризонгу плоскостей, котактирующих через опорь скольжения с датОДком тЬрйЗоята, и измерителя линейных пере-мещений датчика относительно корпуса и выполнению при этом цепи обратнбй связи в виде задемпфированнбго датчика силы, подключеяй)гр через усилитель к мостовой схеме, 1ЮrpeiiiHocTb линейности статической характериетики наклономера Moxef бьпь снижена на порядок при маль1х углах наклона ллоскрстей 5 (практически до десйтУх долей угл.сек). /
Ф О р м у л а изо б р е т ей и я
Наклойомер,содержащий корПуЬ с расйоЛоженйым в нем датчиком горизонта в виде частично заполйенной электролитом ампулы с
35 электродами, вклю енйь1мй в мосювую схему и цепь обратной связи, о т Л и ч а ю щ и йс я тем, что, с целью повьшёшй его точ- . ности, в него введены преобразователь линейногбпёремегценйй датчика горизонта в eh) угаово
40 перемещение относительно KOjpnyca, вьшолненный,например, в виде Двух.1наклойнь1Х к горизонту плоскостей, контактирующих через опоры скольжения с датчиком горизонта, и измеритель линейных перемещений датчика горизонта относительно корпуса, а цепь обратной связи вьпюлнена в виде задемпфировашюго датчика силы, подключенного через усилитель к мостовой схеме.
Источники информации, принятые во внима50 нйе при экспертизе,
55 3. Авторское свидетельство СССР № 415491, кл. G 01 С 9/18, 1971.
3
