(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ОШзЕКТА
Изобретение относится к области приборостроения и может быть использовано для определения угла отклонения объекта от плоскости горизонта.
Известен наклономер, содержащий поплавковую камеру, соединённую с маятником, который посредством плоской пружины соединен с корпусом, и oTCj eTHoe устройство, состоящее из стрелки на маятнике и шкалы на корпусе 1 . . .
К недостаткам такого устройства следует отнести недостаточную разрешающую способность, визуальный съем результатов измерений, зависимость показаний от температуры.
Известно устройство для опреде- , ления угла наклона, содержащее подвешенную в корпусе на торсионной пружине ампулу, заполненную жидкостью с воздушным пузырьком, оправа которой связана с электромагнитной системой, и дифференциальный конденсатор, электрически соединенный с электронным устройством управ, ления электромагнитной системой .
При наклоне корпуса происходит перемещение пузырька, вызывающее
изменение емкости конденсатора, которое преобразуется электронным устройством в напряжение, подаваемое на электромагнитную систему
и измерительный прибор. Электромагнитная система возвращает ампулу в исходное положение, а развиваемый ею момент уравновешивается упругим 10 моментом торсионной пружины. По величине напряжения, подаваемого на электромагнитную систему, судят об угле наклона.
К недостаткам такого устройства следует отнести следунвдее;
15
низкая эксплуатационная надежность, так как на торсион действуют силы инерции; обусловленные массой ампулы и перегрузками, приводящие к изменению его жесткости;
20
недостаточная точность и разрешающая способность из-за наличия , явления гистерезиса торсионной пружины. Разрешающая способность выход2f ного устройства ограничена размерами пузырька, диэлектрической проницаемостью электролита и расстоянием между обкладками. На точность оказывает влияние явление старения 20 торсиона; диапазон измерений yrrioiaorpaHH ен величиной взаимного перемещения ротора относительно статора электромагнитной системы приведения. Известны также На1слбн6мёры,«ма;ятни ковые массы которых выполнены в виде резервуара, частично заполненные жидкостью р . Ближайшим к изобретению по технической сущности и достигаемому результату является HaKJrbHOMep, выполненный по схеме интегрирующего аксе лёрометра 4 , Устройство содержит подвижную пдплавковую камеру (поплавок ), центр масс которого смещен отно сительно оси вращения. Поплавок с по 1Й5щью цапф подвешен в корпусе. Пространство между поплавком и корпусом за полнено жидкостью, плотность которой подбирается равной средней плотностиТ1«5пЛавка. На поплавке размещены датчи угла, преобразующий угловое перемещение поплавка в электрическое напряжение, и датчик момента, который используется как исполнительный элемент цепи обратной связи. Величина трк в (Эбмотке датчика мо мё нта является мерой углового отклонения поплавка. Для поддержания.постоянства температу ры жидкости и поплавка предусмотрено автоматическое термостатирование. Для компенсации расшйрения поддержива щей жидкости. при изменении температур 6т рабочей до температуры,при которой прибор хранится, предусмотрен сильфон Устройство работает следующим образом. При наклоне корпуса на угол о относительно оси Подвеса поплавка происходит поворот поплавка вместе с кбрпусом за счет вязкого трения попла ка и к(пуса о жидкость. При этом воз никает вращающий момент М , Йтрёмящий ся вернуть поплавок в Прежнее Обложение (нижняя маятниковость), величина которого определяегся выражением .- -. -- - - f. . М m 1 S i поС , где m - приведенная масс, 1 - расстояние от оси вращения до центра приведенной массн. Под действием м 5мента М поплавок пово рач11вае тся относительно оси подвеса в сторону уменьшения угла Ы , при этом в сигнальной обмотке датчика;угл воз никает сигнал, усйлйвается усилителем обратной связи и прикладывается к датчику момента. Датчик моме та возвращает поплавок в такое положение, при котором нет относительного рас сргласования между статором и рото ром датчика угла (нулевое положение), при этом датчик момента развивает момен.т по модулю равный моменту М, но . направленный встре гнб моменту М. величина угла отклонения от плоскости ТорйзбнтабцениваетсйПо величине тока датчика момента.
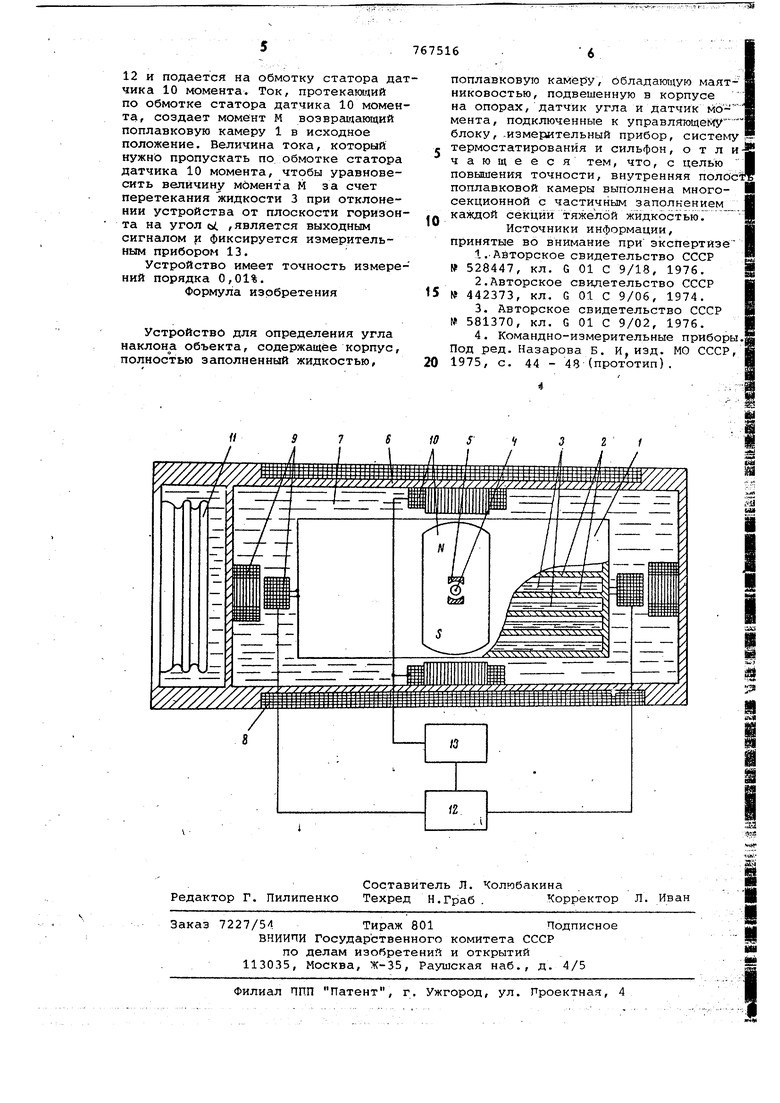
:-:j 5te iC«trvi%- j-Ni iSij«К недостаткам такого устройства следует отнести недостаточную точность. Целью изобретения является повышение точности устройства. Это достигается тем, что поплавковая камеоа выполнена многосекционной с частичным заполнением каждой секции тяжелой жидкости (1 г/см) .Толщина слоя жидкости выбирается из условия обеспечения линейности в желаемом иапазоне измерений углов, при этом толщина слоя должна быть такой,.чтобы на пределе диапазона измерений было полное нижней поверхности каждой из секций поплавковой камеры. На чертеже показана функциональная схема устройства. Устройство содержит поплавковую камеру 1, внутренняя полость которой состоитиз п герметичных секций 2, каждая секция частично заполнена тяжелой жидкостью 3. Поплавковая камера 1 с помотиью цапф 4 подвешена в камневых опорах 5 корпуса 6. Пространство между поплавком и корпусом заполнено жидкостью 7, которая обеспечивает гидростатическую разгрузку опор 5 и создает совместно с внутренней поверхностью корпуса 6 и наружной поверхностью поплавке 1демпфирующий момент. Корпус . устройства тер мостатирован системой 8. На корпусе жестко закреплены датчик 9 угла и датчик 10 момента. Сигнальные обмотки датчика 9 угла соединены последовательно с целью компенсации родиальных перемещений поплавка. Устройство содержит сильфон 11 . Работает устройство следующим образом. При наклоне корпуса 6 на угол 0 относительно плоскости горизонта поплавок 1 тоже наклоняется на УГОЛ oi (относительного перемещения поплавка и корпуса нет из-за вяз-, кого, трения поплавка и корпуса о жидкость). При этом под действием сил гравитации жидкость 3 секций 2перемещается в сторону наклона поплавка до тех пор, пока ее поверхность не станет параллельна плоскости горизонта. При этом жидкость создает вращающий момент относительно оси подвеса поплавка. Величина момента М для каждой из секций 2, имеющих вид прямоугольного параллелепипеда с размерами 1-длина, Ь-ширина, h-высота, определится по формуле м4-ЬТ--bg -2ST « (г/см), где 5( - плотность жидкости 3 (г/см) Под действием момента М поплаво 1 отклоняется относительно корпуса 6 ь сторону увеличения угла d. , при ,зтрм снимается напряжение с дг ка 9 угла. Это напряжение усиливаь ся электронным управляющим блоком
