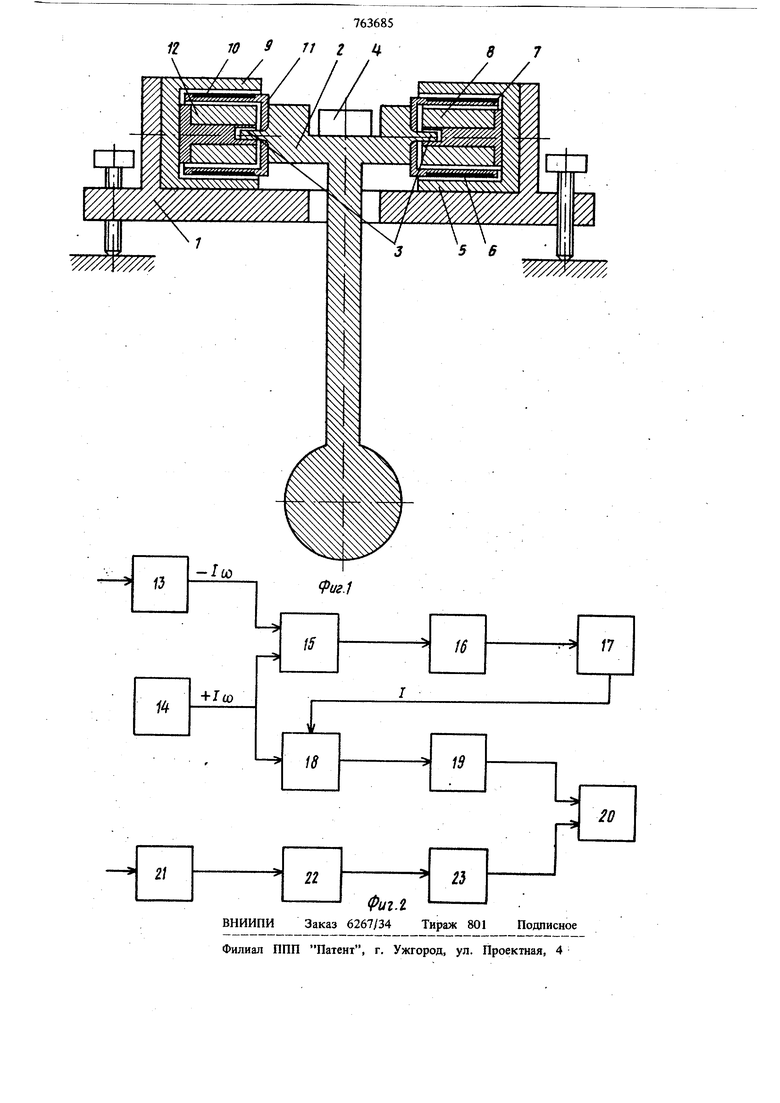
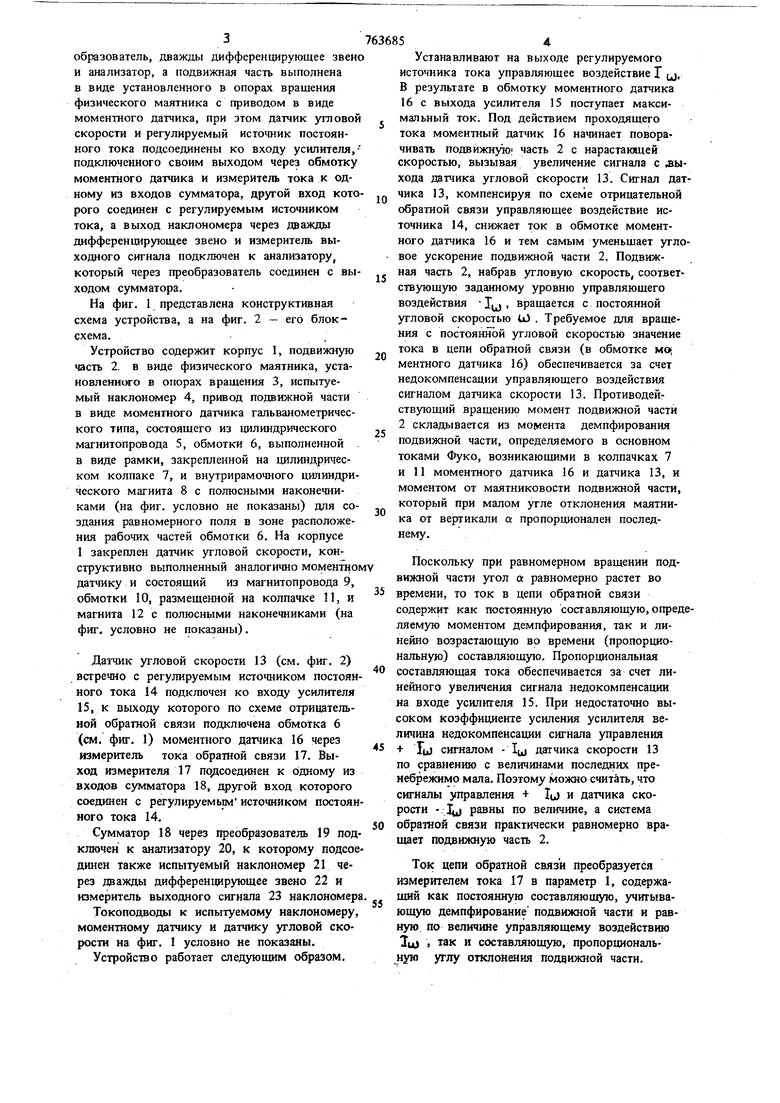
Изобретение относится к области измерительной техники и предназначено для исполь зования при проверке параметров прецизионных измерителей угла наклона. Известны устройства для испытаний наклоно меров с помощью оптической делительной головки, содержащие корпус, подвижную часть с испытуемым наклономером, измерители угло вых перемещений подвижной части и выходного сигнала наклономера 1. Эти устройства обладают нелинейной харак теристикой задания углов наклона, что затруд ет их использование. Известны также устройства для проверки наклономеров, содержащие корпус, подвижную часть с испытуемым наклономером, привод подвижной части, преобразователь и индикатор 2. Ближайщим по технической сущности и до сгигаемому результату является устройство для испытаний наклономеров, которое содержит корпус, подвижную часть с испытуемым наклономером, привод подвижной части и изм ритель выходного сигнала наклономера 3. Обладая простотой, известное устройство не обеспечивает надлежащую точность определения нелинейности характеристики прещ зионных наклономеров в силу значительной погрешности задания реперных углов наклона при снятии статической характеристики накпономера, а также погрещность вычисления нелинейности, обусловленную сползанием характеристики наклономера из-за дрейфов нуля и масщтабного козффициента в результате воздействия дестабилизирующих факторов в течение трудоемкого и длительного процесса снятия по точкам статической характеристики наклономера. Целью изобретения является повышение точности определения нелинейности наклономера. Указанная цель достигается тем, что в устройство,- содержащее корпус, подвижную часть с испытуемым наклономером, привод подвижной части и измеритель выходного сигнала наклономера, введены датчик-угловой скорости, регулируемый источник постоянного тока, усилитель, измеритель тока, сумматор, преобразователь, дважды дифференцирующее звен и анализатор, а подвижная часть выполнена в виде установленного в опорах вращения физического маятника с приводом в виде моментного датчика, при этом датчик угловой скорости и регулируемый источник постоянного тока подсоединены ко входу усилителя, подключенного своим выходом через обмотку моментного датчика и измеритель тока к одному из входов сумматора, другой вход кото рого соединен с регулируемым источником тока, а выход наклономера через дважды дифференцирующее звено и измеритель выходного сигнала подключен к анализатору, который через преобразователь соединен с вы ходом сумматора. На фиг. 1 представлена конструктивная схема устройства, а на фиг. 2 - его блоксхема. Устройство содержит корпус 1, подвижную часть 2. в виде физического маятника, установленного в опорах вращения 3, испытуемый наклонсмер 4, привод подвижной части в виде моментного датчика гальванометрического типа, состоящего из цилиндрического магнитопровода 5, обмотки 6, выполненной в виде рамки, закрепленной на цилиндрическом колпаке 7, и внутрирамочного цилиндрического магнита 8 с полюсными наконечниками (на фиг. условно не показаны) для создания равномерного поля в зоне расположения рабочих частей обмотки 6. На корпусе 1 закреплен датчик угловой скорости, конструктивно выполненный аналогично моментно датчику и состоящий из магнитопровода 9, обмотки 10, размещенной на колпачке 11, и магнита 12 с полюсными наконечниками (на фиг. условно не показаны). Датчик угловой скорости 13 (см. фиг. 2) встречно с регулируемым источником постоян ного тока 14 подключен ко входу усилителя 15, к выходу которого по схеме отрицательной обратной связи подключена обмотка 6 (см. фиг, 1) моментного датчика 16 через измеритель тока обратной связи 17. Выход измерителя 17 прдсоединен к одному из входов сумматора 18, другой вход которого соединен с регулируемым источником постоян ного тока 14, Сумматор 18 через преобразователь 19 под ключен к анализатору 20, к которому подсое динен также испытуемый наклономер 21 через дважды дифференцирующее звено 22 и измеритель выходного сигнала 23 наклономер Токоподводы к испытуемому наклономеру, моментному датчику и датчику угловой скорости на фиг. I условно не показаны. Устройство работает следующим образом. Устанавливают на выходе регулируемого источника тока управляющее воздействие Г и, В результате в обмотку моментного датчика 16 с выхода усилителя 15 поступает максимальный ток. Под действием проходящего тока моментный датчик 16 начинает поворачивать подвижную: часть 2 с нарастающей скоростью, вызывая увеличение сигнала с дыхода датчика угловой скорости 13. Сигнал датчика 13, компенсируя по схеме отрицательной обратной связи управляющее воздействие источника 14, снижает ток в обмотке моментного датчика 16 и тем самым уменьшает угловое ускорение подвижной части 2. Подвижная часть 2, набрав угловую скорость, соответствующую заданному уровню управляющего воздействия , вращается с постоянной угловой скоростью U) . Требуемое для вращения с постоянной угловой скоростью значение тока в цепи обратной связи (в обмотке мо; ментного датчика 16) обеспечивается за счет недокомпенсации управляющего воздействия сигналом датчика скорости 13. Противодействующий вращению момент подвижной части 2 складывается из момента демпфирования подвижной части, определяемого в основном токами Фуко, возникающими в колпачках 7 и И моментного датчика 16 и датчика 13, и моментом от маятниковости подвижной части, который при малом угле отклонения маятника от вертикали а пропорционален последнему. Поскольку при равномерном вращении подвижной части угол а равномерно растет во времени, то ток в цепи обратной связи содержит как постоянную составляющую, определяемую моментом демпфирования, так и линейно возрастающую во времени (пропорциональную) составляющую. Пропорциональная составляющая тока обеспечивается за счет линейного увеличения сигнала недокомпенсации на входе усилителя 15. При недостаточно высоком коэффициенте усиления усилителя величина недокомпенсавди сигнала управления + Ты сигналом - датчика скорости 13 по сравнению с величинами последних пренебрежимо мала, Позтому можно считать, что сигналы управления + Тц) и датчика скорости -.1 равны по величине, а система обратной связи практически равномерно вращает подвижную часть 2. Ток цепи обратной связи преобразуется измерителем тока 17 в параметр 1, содержащий как постоянную составляющую, учитывающую демпфирование подвижной части и равную по величине управляющему воздействию 1ц) , так и составляющую, пропорциональную углу отклонения подвижной части.
Сумматор 18 выделяет пропорциональную составляющую (путем вычитания из параметра 1 постоянной составляющей Ijj) и подает ее в преобразователь 19, с выхода которого на анализатор 20 поступают возрастающие значения угла отклонения подвижной части 2. части 2.
При равномерном вращении подвижной част на выходе испытуемого наклономера наблюдается непрерывное нарастание выходного сигнала. Ограничиваясь с достаточной для практических целей точностью учетом только квадратичной составляющей нелинейности статической характеристики наклономера, можно записать выражение для его выходного сигнала в виде
С ko + К. а + kj а
где ko - нулевой сигнал наклономера;
ki - коэффициент преобразования наклономера;
kj - коэффициент квадратичной нелинейности наклономера.
Сигнал наклономера С через дважды дифференцирующее звено 22 подается на измернтель 23 в виде
-.С А
Измеритель 23 преобразует квадратичную нелинейность наклономера в параметр ДС, который поступает на вход анализатора 20, который по значениям ДС и а определяет нелинейность характеристики испытуемого наклономера в интересующих точках его статической характеристики.
Устройство допускает определение (по реперным точкам) статической характеристики наклономера и порога его чувствительности., Для этого достаточно отсоединить от входа усилителя 15 датчик скорости 13, а от сумматора 18 регулируемый источник 14, закоротить дважды дифференцирующее звено 22 и, задавая от источника 14 надлежащие управляющие воздействия, определить указанные параметры наклономера.
Введение в устройство датчика скорости 13, регулируемого источника тока 14, усилителя 15, измерителя 17, сумматора 18, преобразователя 19, анализатора 20 и дважды дифференцирующего звена 22 и выполнение подвижной части 2 в виде установленного в опорах вращения физического маятника с приводом от моментного датчика 16 позволило на порядок повысить по сравнению.с известным устройством точность определения нелинейности характеристики наклономера за счет сокращения времени измерений и снижения погрецшости задания углов наклона.
Уменьшение времени измерений, достигнутое, благодаря исключению необходимости построения по точкам статической характеристики наклономера и последующего вычисления (с помощью математической обработки) . ее нелинейности, позволило пропорционально снижению времени измерений снизить погрещность от дрейфов нуля и масштабного коэффициента наклономера.
Формула изобретения
Устройство для испытаний наклономеров, содержащее корпус, подвижную часть с испытуемым наклономером, привод подвижной части и измеритель выходного сигнала наклономера, отличающееся тем, что, с целью повышения точности определения нелинейности наклономера, в него введены датчик угловой скорости, регулируемый источник прстояшого тока, усилитель, измеритель тока, сумматор преобразователь, дважщ дифференцир}тощее звено и анализатор, а подвижная часть выполнена в виде установленного в опорах вращения физического маятника с приводом в виде моментного датчика, при этом датчик угловой скрости и регулируемый источник постоянного тока подсоединены ко входу усилителя, подключенного своим выходом через обмотку моментного датчика и измеритель тока к одному из входов сумматора, другой вход которого соединен с регулируемым источником тока, а выход наклономера через .дважды дифференцир5тощее звено и измеритель выход ; кого сигнала подключен k анализатору, который через преобразователь соединен с выходом сумматора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 355569, кл. Q 01 Р 21/00, 1970.
2.Авторское свидетельство по заявке N 2563314/18-10, кл. 3 01 С 25/00, 1977.
3.Елисеев С. В. Геодезические инструменты и приборы. М., 1959, с. 338 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания наклономеров | 1977 |
|
SU731291A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Измеритель угла наклона подвижного объекта | 1985 |
|
SU1255858A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Нитеподающее устройство с электронным регулированием натяжения нити | 1987 |
|
SU1727535A3 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |