Изобретение относится к области измерительной техники и может быть использовано для определения параметров наклона объекта: полного угла наклона и направления наклона, - маятниковым компенсационным наклономером.
Известен способ определения углового положения объекта маятниковым компенсационным наклономером путем установки наклономера на контролируемый объект и регистрации выходных сигналов наклономера.
Недостатком этого способа является недостаточная точность контроля углового положения контролируемого объекта, так как данный способ не позволяет определять полный угол и направление наклона объекта.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является способ определения параметров наклона объекта путем установки на контролируемый объект двух маятниковых компенсационных наклономеров в положение с взаимно перпендикулярными измерительными осями и измерения выходных сигналов наклономеров.
Недостатком данного способа является увеличение габаритно-массовых характеристик измерителя, так как необходимо использование двух наклономеров, а также необходимость наличия именно двух наклономеров. Что же касается выходной информации одного наклономера, то она также обладает недостаточной точностью для определения углового положения объекта, так
XI
СЬ О
Сл
ч
как не позволяет определять полный угол и направление наклона объекта.
Целью изобретения является повышение точности при одновременном повышении информативности за счет определения направления наклона при определении углового положения объекта маятниковым компенсационным наклономером.
Сущность изобретения заключается в том, что в способе определения углового положения объекта, включающем установку маятникового компенсационного наклономера с вертикальной осью подвеса, горизонтальной измерительной осью и масштабным коэффициентом lg на объект, измерение выходного сигнала И наклономера в исходном положении при согласованном контуре обратной связи и обработку результатов измерения, - после измерения сигнала И вводят рассогласование в контур обратной связи и последовательно отклоняют маятник относительно исходного положения на углы + у,±у,+2у и 2 у, дополнительно измеряют выходные сигналы 2, з, Ц и Is наклономера, соответственно, в каждом из положений, а направление наклона / и угол наклона в вертикальной плоскости «определяют из выражений:
/8 arctg
2 h (I2 + з)
2 (I2 - l3) - (l4 l5)
2 sin у
а arcsin
2 Ь - (Г2 + з)
4lg sin/3 sin2 I
.при
или
a arcsin
2 (I2 - з) - (l4 - is)
8 Igcos sinysln2
при р 90°.
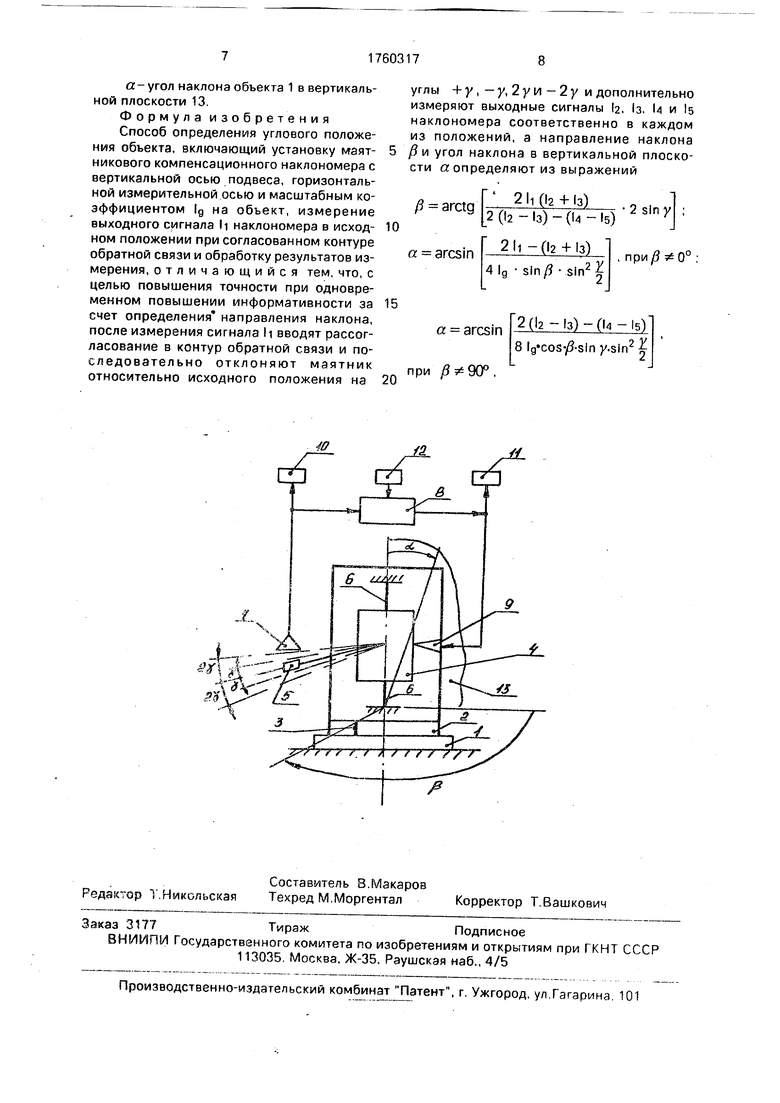
На чертеже изображена блок-схема устройства для реализации способа определения углового положения объекта.
Блок-схема содержит объект 1, параметры наклона которого подлежат определению, корпус 2 наклономера с ориентационной риской 3. подвижную систему 4 с маятником 5 наклономера, установленную на подвесе 6 в корпусе 2, датчик 7 угла, усилитель 8 обратной связи и датчик 9 момента наклономера, измеритель 10 выходного сигнала датчика 7, измеритель 11 выходного сигнала наклономера и блок 12 смещения нуля усилителя 8.
На Черт, также условно показаны:
вертикальная плоскость 13 наклона объекта 1,угол а-угол отклонения оси подвеса наклономера от вертикали, угол наклона объекта в вертикальной плоскости, угол / угол отклонения маятника 5 наклономера от вертикальной плоскости 13 наклона оси подвеса, азимутальный угол наклона объекта 1, характеризующий направление наклона, контрольный угол у и удвоенный
контрольный угол 2 у, на которые отклоняют подвижную систему 4 с маятником 5 при введении рассогласования в контур обратной связи.
Изобретение осуществляется путем выполнения следующих операций:
1.Устанавливают корпус 2 наклономера на объекте 1 в исходное положение, при котором ось подвеса наклономера вертикальна, а измерительная ось горизонтальна,
при этом наклономер устанавливают на объекте 1 базовой плоскостью, имеющейся на корпусе 2 наклономера. Кроме этого, на корпусе 2 наклономера имеется контрольная риска 3, соответствующая направлению маятника 5 в режиме с замкнутой обратной связью в исходном положении (при согласованном контуре обратной связи наклономера), когда положение подвижной системы 4 на подвесе 6 в корпусе 2 относительно датчика 7 угла соответствует нулевому уровню выходного сигнала датчика 7, контролируемого измерителем 10.
Эта риска 3 координирует положению наклономера в азимутальной плоскости и может быть совмещена либо с какой-либо осью условно заданной системы координат, например, определенным образом связанной с объектом 1, либо может быть совмеще- на, например, с направлением на Север, или еще с каким-то направлением, относительно которого необходимо определить направление наклона объекта 1.
2.С помощью измерителя 11 измеряют выходной сигнал И наклономера в исходном
положении, который можно представить выражением
H AV +lg sin a sin/,, где И - величина измеренного выходного сигнала наклономера:
А V - смещение нуля наклономера; А - крутизна изменения смещения нуля; ty - угол отклонения подвижной системы 4 вокруг оси подвеса в наклономере от положения, при котором смещение нуля соответствует нулевому уровню;
lg - масштабный коэффициент наклономера, выходной сигнал наклономера, соответствующий воздействию на маятник 5
полного вектора ускорения гравитационного поля Земли (g 9.81 м/сек2);
а-угол отклонения оси подвеса наклономера от вертикали, угол наклона объекта 1 в вертикальной плоскости 13;
/3 - угол отклонения маятника 5 наклономера от вертикальной плоскости 13 наклона оси подвеса, азимутальный угол наклона объекта 1, характеризующий направление наклона объекта 1, или угол между вертикальной плоскостью 13 наклона оси подвеса и вертикальной плоскостью, проходящей через маятник 5 и риску 3, совмещенную в исходном положении наклономера с определенным направлением, относительно которого требуется определить угловое положение объекта 1.
3.Введением рассогласования в контур обратной связи наклономера путем смещения нуля усилителя 8 с помощью блока 12 отклоняют подвижную систему 4 с маятником 5 вокруг оси подвеса на контрольный угол + у.
При этом, практически, отклоняют подвижную систему 4, контролируя выходной сигнал датчика 7 угла наклономера измерителем 10, до положения, соответствующего определенной контрольной величине выходного сигнала датчика 7 угла. Контрольная величина выходного сигнала датчика 7 угла выбирается исходя из конкретной конструкции наклономера, типа и схемы датчика угла, с учетом разрешающей способности датчика угла, его линейного диапазона, и углового диапазона перемещения подвижной системы в наклономере, определяемого расположением ограничительных упоров. Контрольная величина выходного сигнала датчика 7 угла определяется выражением:
Ug.y. K -у,
где Ug.y. - контрольная величина выходного сигнала датчика 7 угла;
К - крутизна датчика 7 угла (основная техническая характеристика наклономера, которая фиксируется в технической документации при калибровке наклономера).
у- величина контрольного угла отклонения подвижной системы 4 с маятником 5.
4.С помощью измерителя 11 измеряют выходной сигнал г наклономера, который можно представить выражением
l2 A()+ lg since sin(i6+y), где 2 - величина измеренного выходного сигнала наклономера;
у- величина контрольного угла.
5.Введением рассогласования в контур обратной связи наклономера с помощью
блока 12 отклоняют подвижную систему 4 с маятником 5 вокруг оси подвеса относительно исходного положения на контрольный угол - у
56 С помощью измерителя 11 измеряют
выходной сигнал з наклономера который можно представить выражением:
10
з A()+ lg sin a sin (fl - у).
где з - величина измеренного выходного сигнала наклономера.
7.Введением рассогласования в контур обратной связи наклономера с помощью
блока 12 отклоняют подвижную систему 4 с маятником 5 вокруг оси подвеса относительно исходного положения на удвоенный контрольный угол + 2 у.
8.С помощью измерителя 11 измеряют выходной сигнал 14 наклономера, который
можно представить выражениемl4 A (t/ + 2y) + lg sin a sin# + 2y),
где Ц - величина измеренного выходного сигнала наклономера.
9.Введением рассогласования в контур обратной связи наклономера с помощью блока 12 отклоняют подвижную систему 4 с
маятником 5 вокруг оси подвеса относительно исходного положения на удвоенный контрольный угол -2 у.
10.С помощью измерителя 11 измеряют выходной сигнал Is наклономера, который
можно представить выражением:
ls A () + lg sin a sin у),
где Is - величина измеренного выходного сигнала наклономера.
11. Из соотношения измеренных величин определяют параметры наклона объекта 1, - угол и Направление наклона, - по формулам
,#4%-Н
21,-&±1з)
« arcsm
s.n2Ј
а arcsm
4lg -sln/3
2(b-l3)-(U-i5)
8 Ig COS/ Sin у Sin2
для В 903.
где р -азимутальныйугол наклона объекта
1, характеризующий направление наклона.
а- угол наклона объекта 1 в вертикальной плоскости 13.
Формула изобретения Способ определения углового положения объекта, включающий установку маятникового компенсационного наклономера с вертикальной осью подвеса, горизонтальной измерительной осью и масштабным коэффициентом Ig на объект, измерение выходного сигнала И наклономера в исходном положении при согласованном контуре обратной связи и обработку результатов измерения, отличающийся тем, что, с целью повышения точности при одновременном повышении информативности за счет определения направления наклона, после измерения сигнала Н вводят рассогласование в контур обратной связи и последовательно отклоняют маятник относительно исходного положения на
углы +у, -у, 2у и - 2у и дополнительно измеряют выходные сигналы la, з, U и Is наклономера соответственно в каждом из положений, а направление наклона / и угол наклона в вертикальной плоскости а определяют из выражений
/ arctg
2 h (I2 + з)
2 (I2 - з) - (14 - Is)
2 slny
а arcsm
2h -(12 + 1з)
а - arcsm
4lfl sin21
2(l2-l3)-(U-l5)
ПрИ/3 5 0C
8 lg cos-/ -sln y.sin2 Ј
20
при 90°.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения изменения параметров маятникового поплавкового компенсационного акселерометра | 1990 |
|
SU1755205A1 |
| Способ определения параметров маятникового компенсационного акселерометра | 1979 |
|
SU866482A1 |
| Наклономер | 1990 |
|
SU1812427A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2012 |
|
RU2504735C1 |
| Устройство для определения углов наклона подвижных объектов | 1976 |
|
SU727992A1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
Использование: измерительная техника, при определении параметров наклона объекта: полного угла наклона и направления наклона, - маятниковым компенсационным наклономером. Сущность изобретения: способ включает следующие операции: установка маятникового компенсационного наклономера на объекте в исходное положение, при котором ось подвеса вертикальна, а измерительная ось горизонтальна, измерение выходного сигнала наклономера, отклонение введением рассогласования в контур обратной связи наклономера подвижной системы с маятником на равные и с противоположным знаком контрольные углы, а затем на удвоенные контрольные углы, измерение в каждом угловом положении подвижной системы выходных сигналов наклономера, определение из соотношения измеренных величин параметров наклона объекта, угла и направления наклона. 1 ил. со с
| Белкин И.М | |||
| Средства линейно-угловых измерений | |||
| Справочник, М., Машиностроение, 1987, с.274-277 | |||
| Shinko Electric Jornai, 1988, 33, № 4, с.127-132. |
