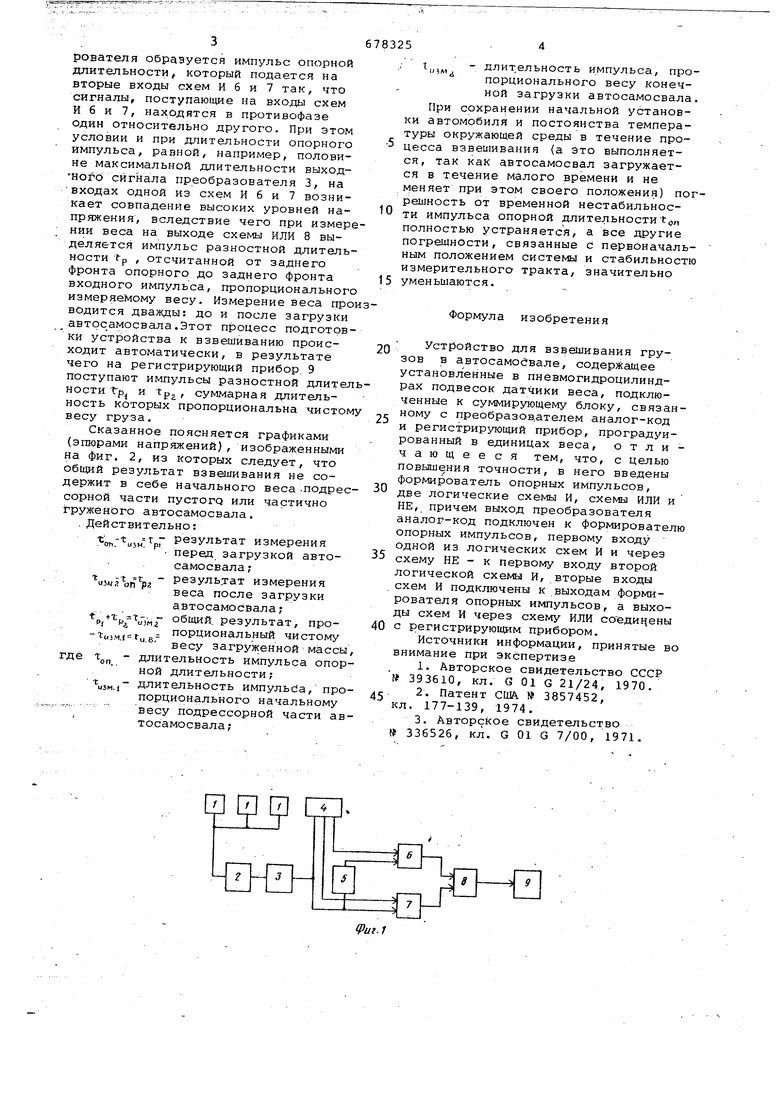
рователя образуется импульс опорной длительности, который подается на вторые входы схем И б и 7 так, что сигналы, поступающие на входы схем И 6 и 7, находятся в противофазе один относительно другого. При этом условии и при длительности опорного импульса, равной, например, половине максимальной длительности выходного сигнала преобразователя 3, на входах одной из схем И 6 и 7 возникает совпадение высоких уровней напряжения, вследствие чего при измер нии веса на выходе схемы ИЛИ 8 выделяется импульс разностной длитель ности Гр , отсчитанной от заднего фронта опорного до заднего Фронта входного импульса, пропорциональног измеряемому весу. Измерение веса про водится дважды: до и после загрузки автрс амосвала.Этот процесс подготов ки устройства к взвешиванию происходит автоматически, в результате чего на регистрирующий прибор. 9 поступают импульсы разностной длите ности t-p и tpj, суммарная длительность которых пропорциональна чисто весу груза. Сказанное поясняется графиками (эпюрами напряжений), изображенными на фиг. 2, из которых следует, что общий результат взве1ливания не содержит в себе начального веса-подре сорной части пустого или частично Груженого автосамосвала. . Действительно: - -т: t- результат измерения перед загрузкой автосамосвала;- результат измерения измгьп рг веса после загрузки автосамосвала; общий, результат, проT. .. - порциональный чистому tuiM.J tu gVU 1М 1 - Гц к весу загрузкенной масс гдё т,, - длительность импульса опо ной длительности длительность импyльda, пр порционального начальному - весу подрессорной части а тосамосвала; - длит,ельность импульса, пропорционального весу конечной загрузки автосамосвала. При сохранении начальной установки автомобиля и постоянства температуры окружающей среды в течение процесса взвешивания (а это выполняется, так как автосамосвал загружается в течение малого времени и не меняет при этом своего положения) погpeuJHOCTb от временной нестабильности импульса опорной длительности г,,, полностью устраняется, а все другие погрешности, связанные с первоначальным положением системы и стабильностю измерительного тракта, значительно уменьшаются. Формула изобретения Устройство для взвешивания грузов в автосамобвале, содержащее установленные в пневмогидроцилиндрах подвесок датчики веса, подключенные к суммирующему блоку, связанному с преобразователем аналог-код и регистрирующий прибор, проградуированный в единицах веса, отличающееся тем, что, с целью повышения точности, в него введены формирователь опорных импульсов, две логические схемы И, схемы ИЛИ и НЕ, причем выход преобразователя аналог-код подключен к Формирователю опорных импульсов, первому входу одной из логических схем И и через схему НЕ - к первому входу второй логической схемы И, вторые входы схем И подключены к выходам формирователя опорных импульсов, а выходы схем И через схему ИЛИ соедицены с регистрирующим прибором. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 393610, кл. G 01 G 21/24, 1970. 2.Патент США № 3857452, кл. 177-139, 1974. 3.Авторское свидетельство № 336526, кл. G 01 G 7/00, 1971.
tpj ton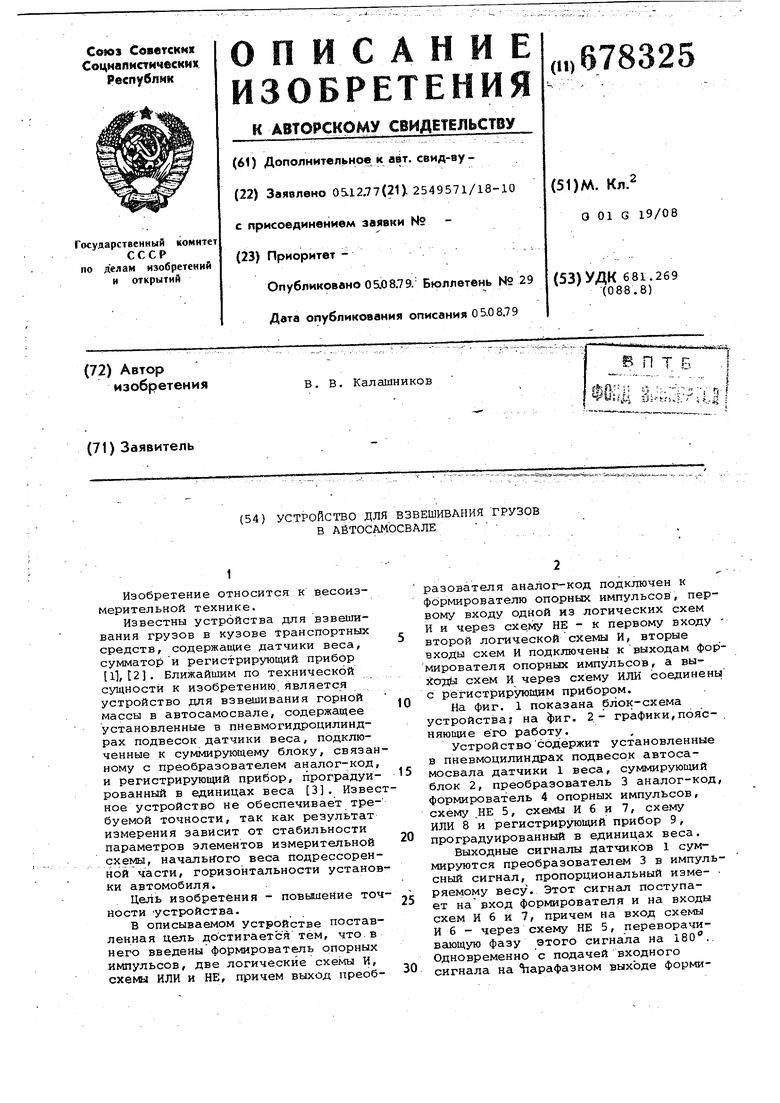
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания груза в автосамосвале | 1982 |
|
SU1049751A1 |
| Устройство для измерения массы | 1983 |
|
SU1476332A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Устройство для взвешивания груза в автосамосвале | 1984 |
|
SU1190203A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Весоизмерительное устройство | 1988 |
|
SU1583751A1 |
| Способ взвешивания автомобилей в движении и устройство для его осуществления | 1983 |
|
SU1276916A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
| Устройство для контроля загрузки | 1987 |
|
SU1476322A1 |
| Тензометрическое устройство для взвешивания грузов в динамических условиях | 1985 |
|
SU1268961A1 |
-| г-.в.
(-
fPut 2
