4 3
05 00
ю ю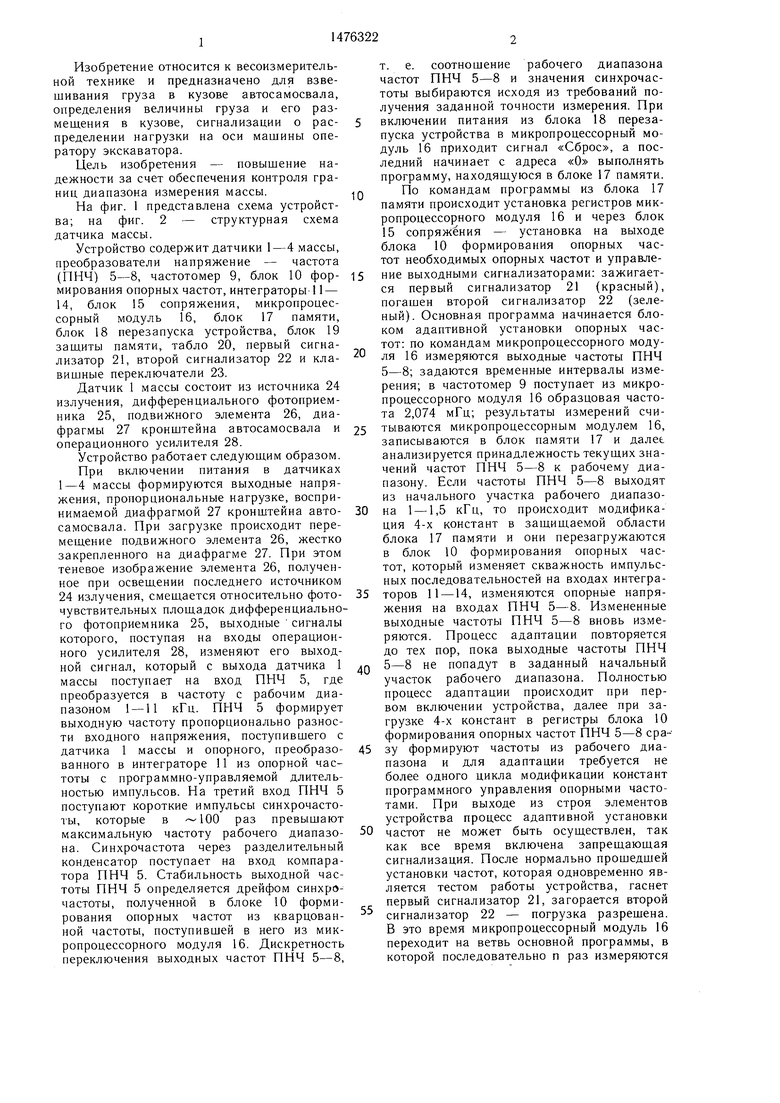
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы груза в кузове автосамосвала | 1986 |
|
SU1372196A1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1985 |
|
SU1290085A1 |
| Способ контроля массы груза и устройство для его осуществления | 1988 |
|
SU1550328A1 |
| УСТРОЙСТВО КОНТРОЛЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО САМОСВАЛОМ, И ПОДВЕСКИ КАРЬЕРНОГО САМОСВАЛА | 2005 |
|
RU2311620C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Цифровой вискозиметр | 1984 |
|
SU1213383A1 |
| Устройство для измерения температуры | 1989 |
|
SU1589078A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
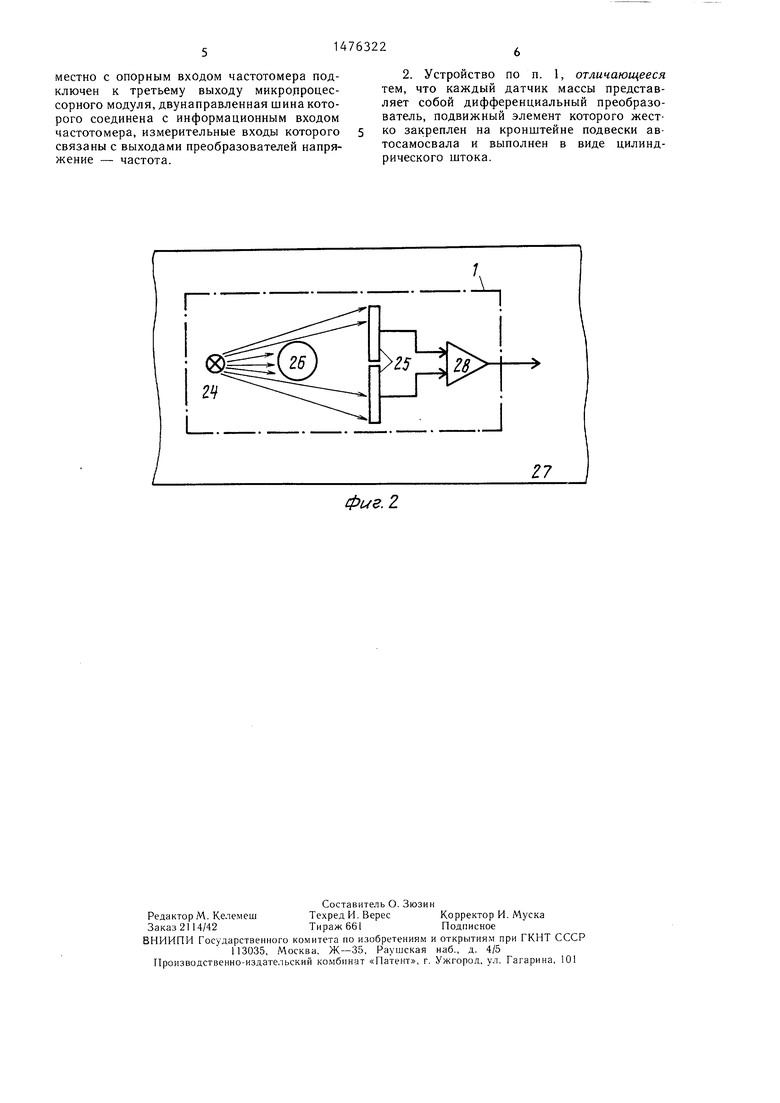
Изобретение относится к весоизмерительной технике и позволяет повысить надежность за счет исключения выхода сигналов датчиков масс из рабочего диапазона. Сигналы с датчиков 1-4 масс поступают в преобразователи 5-8 напряжение-частота, управляемые сигналами с интеграторов 11-14 и блока 10 формирования опорных частот. Блок 10 управляется сигналами с блока 15 сопряжения и микропроцессорного модуля (МПМ) 16. МПМ 16 анализирует результаты измерения в частотомере 9 сигналов с преобразователей 5-8. Результаты измерений из МПМ 16 заносятся в блок 17 памяти, выводятся на табло 20 и управляют сигнализаторами 21 и 22. 1 з.п. ф-лы, 2 ил.
Фиг. J
Изобретение относится к весоизмерительной технике и предназначено для взвешивания груза в кузове автосамосвала, определения величины груза и его размещения в кузове, сигнализации о распределении нагрузки на оси машины оператору экскаватора.
Цель изобретения - повышение надежности за счет обеспечения контроля границ диапазона измерения массы.
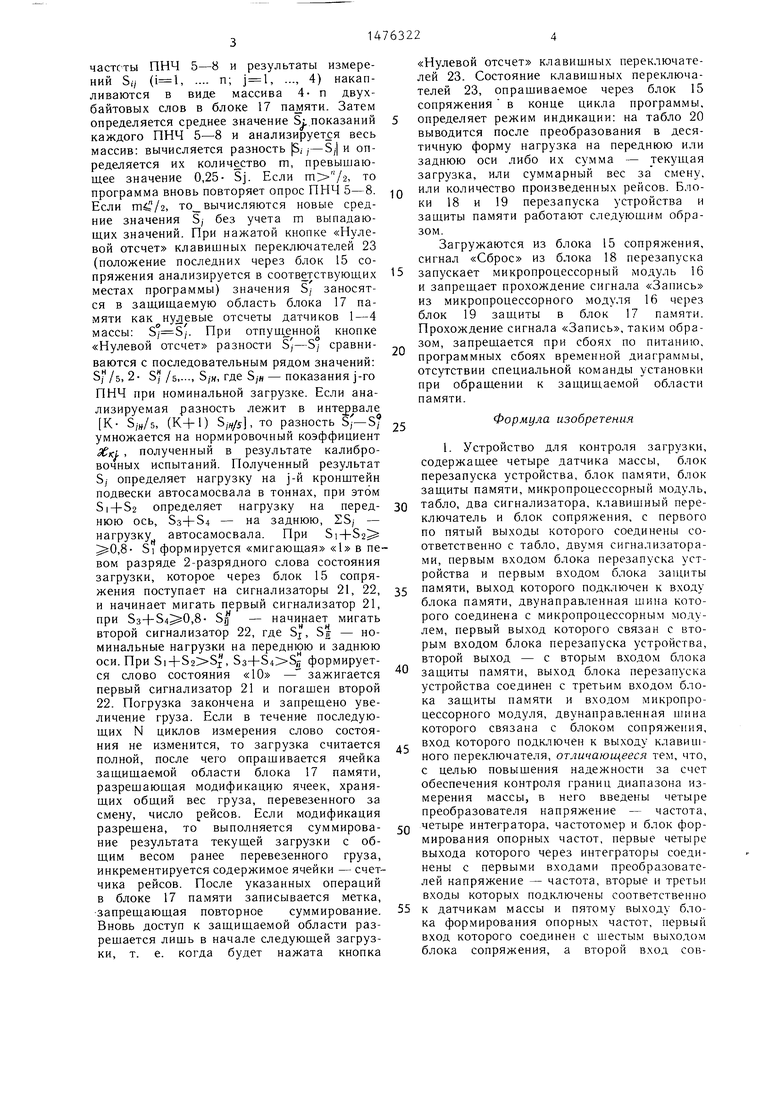
На фиг. 1 представлена схема устройства; на фиг. 2 - структурная схема датчика массы.
Устройство содержит датчики 1-4 массы, преобразователи напряжение - частота (ПНЧ) 5-8, частотомер 9, блок 10 формирования опорных частот, интеграторы-11 - 14, блок 15 сопряжения, микропроцессорный модуль 16, блок 17 памяти, блок 18 перезапуска устройства, блок 19 защиты памяти, табло 20, первый сигнализатор 21, второй сигнализатор 22 и клавишные переключатели 23.
Датчик 1 массы состоит из источника 24 излучения, дифференциального фотоприемника 25, подвижного элемента 26, диафрагмы 27 кронштейна автосамосвала и операционного усилителя 28.
Устройство работает следующим образом.
При включении питания в датчиках 1-4 массы формируются выходные напряжения, пропорциональные нагрузке, воспринимаемой диафрагмой 27 кронштейна автосамосвала. При загрузке происходит перемещение подвижного элемента 26, жестко закрепленного на диафрагме 27. При этом теневое изображение элемента 26, полученное при освещении последнего источником 24 излучения, смещается относительно фоточувствительных площадок дифференциального фотоприемника 25, выходные сигналы которого, поступая на входы операционного усилителя 28, изменяют его выходной сигнал, который с выхода датчика 1 массы поступает на вход ПНЧ 5, где преобразуется в частоту с рабочим диапазоном 1 -11 кГц. ПНЧ 5 формирует выходную частоту пропорционально разности входного напряжения, поступившего с датчика 1 массы и опорного, преобразованного в интеграторе 11 из опорной частоты с программно-управляемой длительностью импульсов. На третий вход ПНЧ 5 поступают короткие импульсы синхрочасто- ты, которые в 100 раз превышают максимальную частоту рабочего диапазона. Синхрочастота через разделительный конденсатор поступает на вход компаратора ПНЧ 5. Стабильность выходной частоты ПНЧ 5 определяется дрейфом синхро- частоты, полученной в блоке 10 формирования опорных частот из кварцован- ной частоты, поступившей в него из микропроцессорного модуля 16. Дискретность переключения выходных частот ПНЧ 5-8,
т. е. соотношение рабочего диапазона частот ПНЧ 5-8 и значения синхрочас- тоты выбираются исходя из требований получения заданной точности измерения. При
включении питания из блока 18 перезапуска устройства в микропроцессорный модуль 16 приходит сигнал «Сброс, а последний начинает с адреса «О выполнять программу, находящуюся в блоке 17 памяти.
QПо командам программы из блока 17
памяти происходит установка регистров микропроцессорного модуля 16 и через блок 15 сопряжения - установка на выходе блока 10 формирования опорных частот необходимых опорных частот и управле5 ние выходными сигнализаторами: зажигается первый сигнализатор 21 (красный), погашен второй сигнализатор 22 (зеленый). Основная программа начинается блоком адаптивной установки опорных частот: по командам микропроцессорного моду0 ля 16 измеряются выходные частоты ПНЧ 5-8; задаются временные интервалы измерения; в частотомер 9 поступает из микропроцессорного модуля 16 образцовая частота 2,074 мГц; результаты измерений счи5 тываются микропроцессорным модулем 16, записываются в блок памяти 17 и далее анализируется принадлежность текущих значений частот ПНЧ 5-8 к рабочему диапазону. Если частоты ПНЧ 5-8 выходят из начального участка рабочего диапазо0 на 1 -1,5 кГц, то происходит модификация 4-х констант в защищаемой области блока 17 памяти и они перезагружаются в блок 10 формирования опорных частот, который изменяет скважность импульсных последовательностей на входах интегра5 торов 11 -14, изменяются опорные напряжения на входах ПНЧ 5-8. Измененные выходные частоты ПНЧ 5-8 вновь измеряются. Процесс адаптации повторяется до тех пор, пока выходные частоты ПНЧ
Q 5-8 не попадут в заданный начальный участок рабочего диапазона. Полностью процесс адаптации происходит при первом включении устройства, далее при загрузке 4-х констант в регистры блока 10 формирования опорных частот ПНЧ 5-8 сра5 зу формируют частоты из рабочего диапазона и для адаптации требуется не более одного цикла модификации констант программного управления опорными частотами. При выходе из строя элементов устройства процесс адаптивной установки
0 частот не может быть осуществлен, так как все время включена запрещающая сигнализация. После нормально прошедшей установки частот, которая одновременно является тестом работы устройства, гаснет первый сигнализатор 21, загорается второй
сигнализатор 22 - погрузка разрешена. В это время микропроцессорный модуль 16 переходит на ветвь основной программы, в которой последовательно п раз измеряются
чаете ты ПНЧ 5-8 и результаты измерений Siy (, .... n; , ..., 4) накапливаются в виде массива 4- п двухбайтовых слов в блоке 17 памяти. Затем определяется среднее значение SL показаний каждого ПНЧ 5-8 и анализируется весь массив: вычисляется разность |S,,-S,j и определяется их количество т, превышающее значение 0,25- Sj. Если , то программа вновь повторяет опрос ПНЧ 5-8. Если mtf/2, то вычисляются новые средние значения S, без учета m выпадающих значений. При нажатой кнопке «Нулевой отсчет клавишных переключателей 23 (положение последних через блок 15 сопряжения анализируется в соответствующих местах программы) значения S, заносятся в защищаемую область блока 17 памяти как нулевые отсчеты датчиков 1-4 массы: . При отпущенной кнопке «Нулевой отсчет разности сравниваются с последовательным рядом значений: S,H/5, 2- S, /в,--., S,-, где SjH - показания j-ro ПНЧ при номинальной загрузке. Если анализируемая разность лежит в интервале К- SjH/5, (K+1) S,«/5, то разность S/- S умножается на нормировочный коэффициент 3Јк1 . полученный в результате калибровочных испытаний. Полученный результат S, определяет нагрузку на j-й кронштейн подвески автосамосвала в тоннах, при этом Si+S2 определяет нагрузку на переднюю ось, Ss-f-S4 - на заднюю, ZS/ - нагрузку автосамосвала. При Si+Ss 0,8- Si формируется «мигающая «1 в левом разряде 2-разрядного слова состояния загрузки, которое через блок 15 сопряжения поступает на сигнализаторы 21, 22, и начинает мигать первый сигнализатор 21, при .S- S$ - начинает мигать второй сигнализатор 22, где Sj, Sf - номинальные нагрузки на переднюю и заднюю оси. При Si-f , 5з+54 5д формируется слово состояния «10 - зажигается первый сигнализатор 21 и погашен второй 22. Погрузка закончена и запрещено увеличение груза. Если в течение последующих N циклов измерения слово состояния не изменится, то загрузка считается полной, после чего опрашивается ячейка защищаемой области блока 17 памяти, разрешающая модификацию ячеек, хранящих общий вес груза, перевезенного за смену, число рейсов. Если модификация разрешена, то выполняется суммирование результата текущей загрузки с общим весом ранее перевезенного груза, инкрементируется содержимое ячейки - счетчика рейсов. После указанных операций в блоке 17 памяти записывается метка, запрещающая повторное суммирование. Вновь доступ к защищаемой области разрешается лишь в начале следующей загрузки, т. е. когда будет нажата кнопка
«Нулевой отсчет клавишных переключателей 23. Состояние клавишных переключателей 23, опрашиваемое через блок 15 сопряжения в конце цикла программы,
определяет режим индикации: на табло 20 выводится после преобразования в десятичную форму нагрузка на переднюю или заднюю оси либо их сумма - текущая загрузка, или суммарный вес за смену,
или количество произведенных рейсов. Блоки 18 и 19 перезапуска устройства и защиты памяти работают следующим образом.
Загружаются из блока 15 сопряжения, сигнал «Сброс из блока 18 перезапуска
5 запускает микропроцессорный модуль 16 и запрещает прохождение сигнала «Запись из микропроцессорного модуля 16 через блок 19 защиты в блок 17 памяти. Прохождение сигнала «Запись, таким образом, запрещается при сбоях по питанию, программных сбоях временной диаграммы, отсутствии специальной команды установки при обращении к защищаемой области памяти.
0
25
Формула изобретения
0 табло, два сигнализатора, клавишный переключатель и блок сопряжения, с первого по пятый выходы которого соединены соответственно с табло, двумя сигнализаторами, первым входом блока перезапуска устройства и первым входом блока защиты
5 памяти, выход которого подключен к входу блока памяти, двунаправленная шина которого соединена с микропроцессорным лем, первый выход которого связан с вторым входом блока перезапуска устройства, второй выход - с вторым входом блока
0 защиты памяти, выход блока перезапуска устройства соединен с третьим входом блока защиты памяти и входом микропроцессорного модуля, двунаправленная шина которого связана с блоком сопряжения,
с вход которого подключен к выходу клавишного переключателя, отличающееся тем, что, с целью повышения надежности за счет обеспечения контроля границ диапазона измерения массы, в него введены четыре преобразователя напряжение - частота,
Q четыре интегратора, частотомер и блок формирования опорных частот, первые четыре выхода которого через интеграторы соединены с первыми входами преобразователей напряжение - частота, вторые и третьи входы которых подключены соответственно
5 к датчикам массы и пятому выходу блока формирования опорных частот, первый вход которого соединен с шестым выходом блока сопряжения, а второй вход совместно с опорным входом частотомера подключен к третьему выходу микропроцессорного модуля,двунаправленная шина которого соединена с информационным входом частотомера, измерительные входы которого связаны с выходами преобразователей напряжение - частота.
фиг. 2
| Устройство для взвешивания груза в автосамосвале | 1982 |
|
SU1049751A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1985 |
|
SU1290085A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
