11
Vl3o6peTeHHe относится к приборостроению, а именно к весоизмерительной технике.
Целью изобретения является повышение точности взвешивания.
Поставленная цель достигается тем что за время перемещения автомобиля на расстояние, превьшающее длину пятна контакта колеса с дорожным покрытием, многократно измеряют нагруз ку, находящуюся на грузоприемной платформе устройства для взвешивания и определяют среднюю скорость движения автомобиля. Затем определяют наг рузку, приходящуюся на колесо авто- мобиля, путем суммирования результатов измерения нагрузки, находящейся на грузоприемной платформе, и введения в полученную сумму результатов поправки, пропорциональной средней скорости движения автомобиля. Общий вес автомобиля вычисляется как сумма нагрузок, приходящихся на каждое из колес автомобиля.
Математически предлагаемый способ
может быть описан, например, следующим образом (фиг.1).
При взвешивании автомобиль наезжает колесом на грузоприемную платформу длиной I, при этом длина пятна контакта будет равна L, а погонная нагрузка от действия колеса - q(S). Эпюра погонной нагрузки при перемещении колеса имеет вид, близкий к трапеции.
При интегрировании измерительного сигнала на участке длины пятна контакта колеса с грузоприемной платформой получают коэффициент соотношения меткду скоростью и весом:
К 1 г П --i q(S)dS
Фактический вес Р автомобиля описывается выражением:
Р - п --- К 1
где V - средняя скорость движения автомобиля ; К - поправочный коэффициент, про порциональный средней скорости движения автомобиля на участке L. На фиг.2 показано устройство для
взвешивания автомобилей в движении,
вид в плане; на фиг.З - то же, вид
сбоку.
5 0
5
0
5
5
6 2
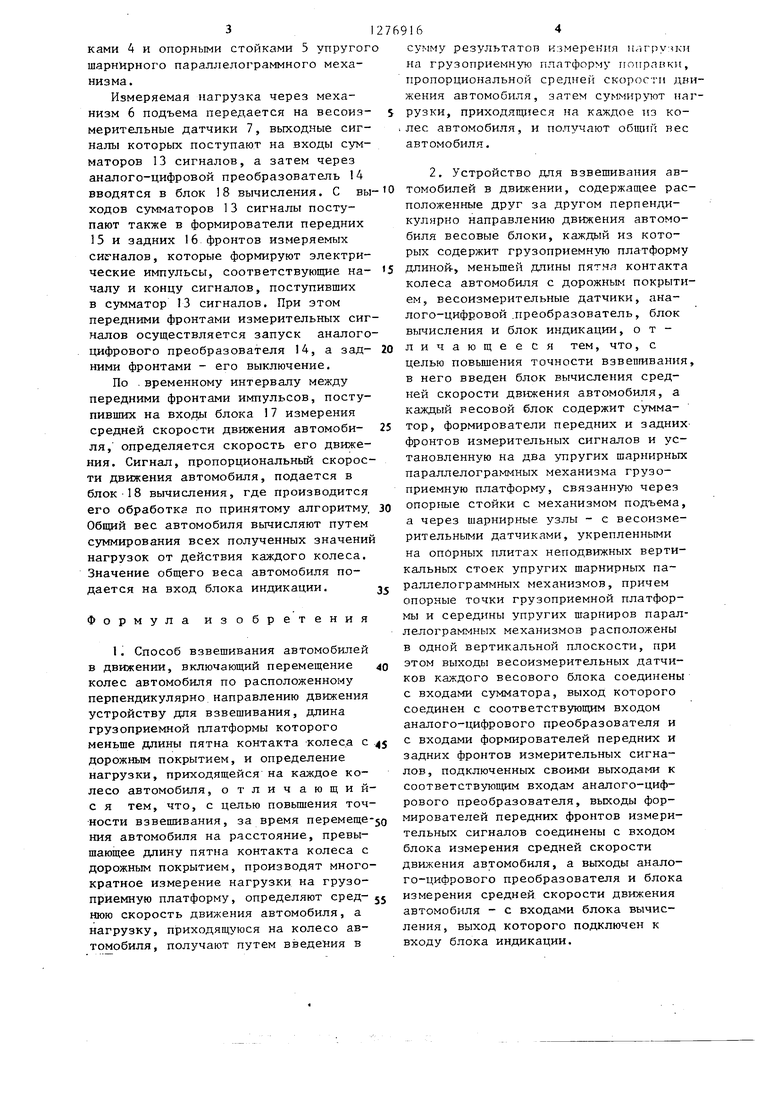
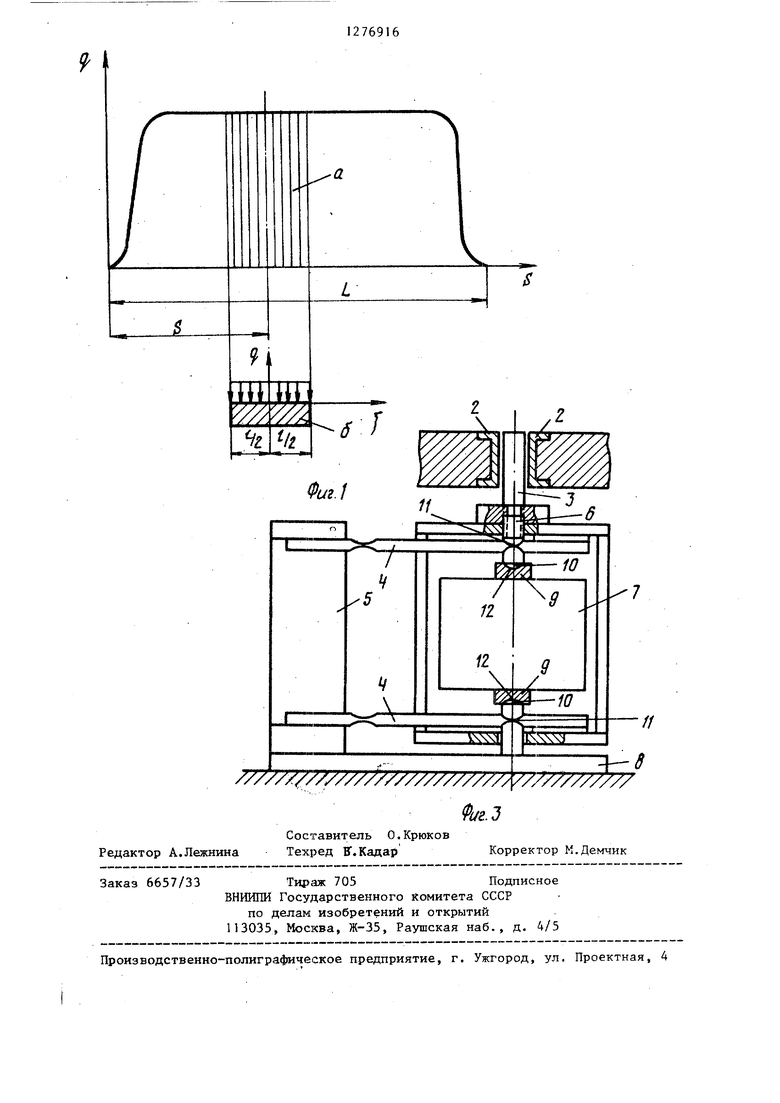
Устройство для взвешивания автомобилей в движении содержит расположенные перпендикулярно направлению движения автомобиля и помещенные друг за другом два или более весовых блока 1, каждый из которых включает две вмонтированные в фундаментную плиту балки 2. Между фундаментными балками расположены грузоприемные платформы 3, каждая из которых установлена на два упругих шарнирных параллелограм- мных механизма. Каждый упругий шарнирный параллелограммный механизм состоит из четырех горизонатльных струнок 4, соединенных одной, стороной с опорной стойкой 5, а другой - с гру- зопри мной платформой 3, которая через механизм 6 подъема связана с весоизмерительным датчиком 7. Опорная стойка 5 соединена с плитой 8. Связь механизма 6 подъема с весоизмерительным датчиком 7 и плитой 8 выполнена через шарнирные узлы-сферические опоры 9 и 10, причем середины (геометрические оси) упругих шарниров 11 совмещены с лежащими в одной вертикальной плоскости опорными точками 12 сферических опор 9 и 10. Выходы весоизмерительных датчиков 7 соединены с входами сумматоров 13 сигнс1лов, выходы которых подключены к входам аналого-цифрового преобразователя 14 и входам формирователей передних 15 и задних 16 фронтов электрического сигнала. Формирователи 15 передних фронтов электрического сигнала соединены с входами аналого-цифрового преобразователя 14 и блока 17 измерения средней скорости. Выходы формирователей 16 задних фронтов электрического сигнала соединены с входами аналого-цифрового преобразователя 14, выход которого вместе с выходом блока измерения средней скорости подключен к входам блока 18 вычисления, своим выходом соединенного с входом блока 19 индикации.
Устрой:ство для взвешивания автомобилей в движении работает следующим образом.
Взвешиваемый автомобиль направляют таким образом, чтобы он двигался перпендикулярно весовым блокам 1, а колеса автомобиля проехали по расположенной между двумя фундаментными балка И 2 грузоприемной платформе 3, строго вертикальное перемещение которой обеспечивается струнками 4 и опорными стойками 5 упругог шарнирного параллелограммного механизма.
Измеряемая нагрузка через механизм 6 подъема передается на весоиз- мерительные датчики 7, выходные сигналы которых поступают на входы сумматоров 13 сигналов, а затем через аналого-цифровой преобразователь 14 вводятся в блок 18 вычисления. С вы ходов сумматоров 13 сигналы поступают также в формирователи передних 15 и задних 16 фронтов измеряемых сигналов, которые формируют электрические импульсы, соответствующие на- чалу и концу сигналов, поступивших в сумматор 13 сигналов. При этом передними фронтами измерительных сигналов осуществляется запуск аналого цифрового преобразователя 14, а зад- ними фронтами - его выключение.
По .временному интервалу между передними фронтами импульсов, поступивших на входы блока 17 измерения средней скорости движения автомоби- ля, определяется скорость его движения. Сигнал, пропорциональньй скорости движения автомобиля, подается в блок18 вычисления, где производится его обработка по принятому алгоритму, Общий вес автомобиля вычисляют путем суммирования всех полученных значений нагрузок от действия каждого колеса. Значение общего веса автомобиля подается на вход блока индикации.
Формула изобретения
1. Способ взвешивания автомобилей в движении, включающий перемещение колес автомобиля по расположенному перпендикулярно направлению движения устройству для взвешивания, длина грузоприемной платформы которого меньше длины пятна контакта колеса с дорожным покрытием, и определение нагрузки, приходящейся на каждое колесо автомобиля, о тлич ающий- с я тем, что, с целью повьш1ения точности взвешивания, за время перемещения автомобиля на расстояние, превышающее длину пятна контакта колеса с дорожным покрытием, производят многократное измерение нагрузки на грузо- приемнун) платформу, определяют сред- кюю скорость движения автомобиля, а нагрузку, приходящуюся на колесо автомобиля, получают путем введения в
сумму результатов измерения 1 нгру:п и на грузоприемную платформу ггопрпвкп пропорциональной средней скорости двжения автомобиля, затем суммируют нарузки, приходящиеся на каждое из ко- , лес автомобиля, и получают обицгй вес автомобиля.
2. Устройство для взвешивания автомобилей в движении, содержащее расположенные друг за другом перпендикулярно направлению движения автомобиля весовые блоки, каждый из которых содержит грузоприемную платформу длиной-, меньшей длины пятня контакта колеса автомобиля с дорожным покрытием, весоизмерительные датчики, аналого-цифровой .преобразователь, блок вычисления и блок индикации, отличающееся тем, что, с целью повьш1ения точности взвепгивания в него введен блок вычисления средней скорости движения автомобиля, а каждый весовой блок содержит сумматор, формирователи передних и задних фронтов измерительных сигналов и установленную на два упругих шарнирных параллелограммных механизма грузоприемную платформу, связанную через опорные стойки с механизмом подъема, а через шарнирные узлы - с весоизмерительными датчиками, укрепленными на опорных плитах неподвижных вертикальных стоек упругих шарнирных параллелограммных механизмов, причем опорные точки грузоприемной платформы и середины упругих шарниров параллелограммных механизмов расположены в одной вертикальной плоскости, при этом выходы весоизмерительных датчиков каждого весового блока соединены с входами сумматора, выход которого соединен с соответствующим входом аналого-цифрового преобразователя и с входами формирователей передних и задних фронтов измерительных сигналов, подключенных своими выходами к соответствующим входам аналого-цифрового преобразователя, выходы формирователей передних фронтов измерительных сигналов соединены с входом блока измерения средней скорости движения автомобиля, а выходы аналого-цифрового преобразователя и блока измерения средней скорости движения автомобиля - с входами блока вычисления, выход которого подключен к входу блока индикации.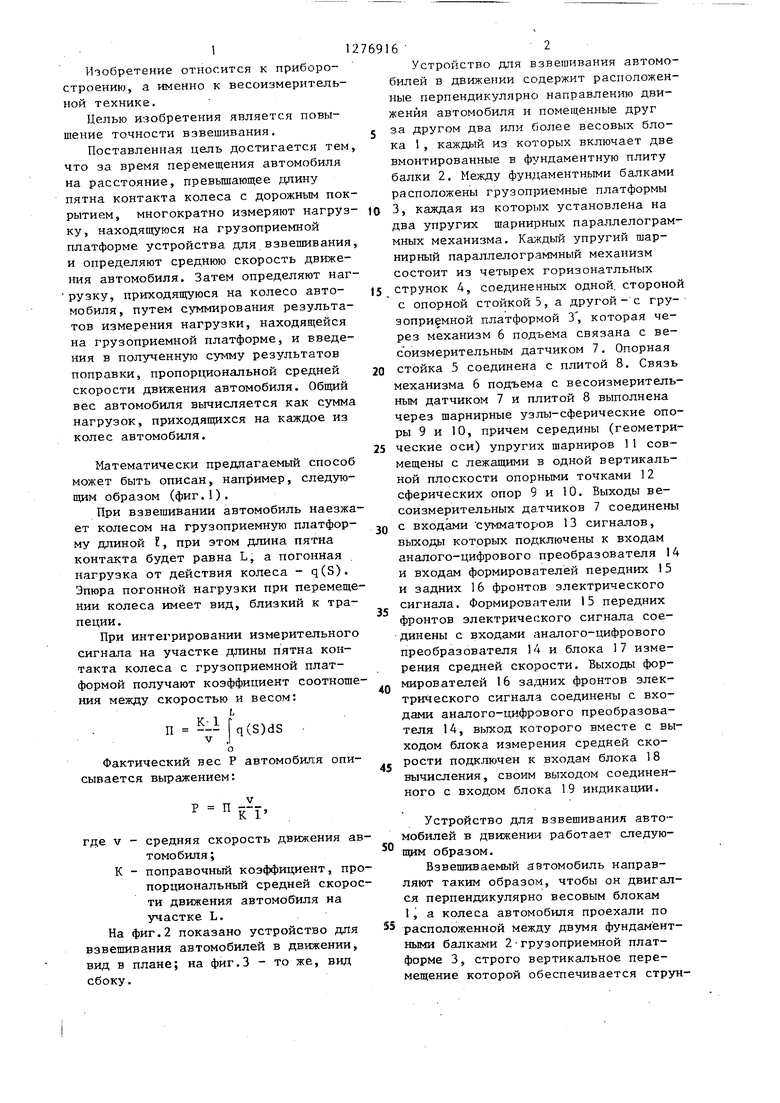
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания автомобилей в движении | 1991 |
|
SU1809323A1 |
| Весовое устройство | 1986 |
|
SU1500847A1 |
| Весы для взвешивания автомобилей в движении | 1979 |
|
SU857726A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1571415A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ДВИЖУЩЕГОСЯ ЖЕЛЕЗНОДОРОЖНОГО ОБЪЕКТА | 2005 |
|
RU2287137C1 |
| Устройство для взвешивания движущихся объектов | 1978 |
|
SU731304A1 |
| Суммирующие конвейерные весы | 1983 |
|
SU1117455A1 |
| Весы для определения нагрузок на оси транспортного средства | 2020 |
|
RU2730375C1 |
| Весы с устройством поверки | 1981 |
|
SU1291826A1 |
Изобретение относится к приборостроению и позволяет повысить точность взвешивания. Измеряемая нагрузка через механизм подъема передается на весоизмерительные датчики 7, выходные сигналы которых поступают .на входы сумматоров 13 сигналов, а затем через аналого-цифровой преобразователь 14 вводятся в блок 18 вычисления, С выходов сумматоров 13 сигналы поступают также в формирователи 15 передних и 16 задних фронтов измеряемых сигналов, где формируются электрические импульсы, соответствующие началу и концу сигналов, поступающих в Сумматор 13 сигналов. Передним фронтом измерительных сигналов запускается аналого-цифровой преобразователь 14, а задним фронтом - его выключение. По временному интервалу между передними фронтами импульсов , поступивших на входы блока 17 измерения, определяется скорость движения автомобиля, сигнал, пропорциональный скорости, подается на блок 18 вычисления, где обрабатьшает- ся по принятому алгоритму. 2 с.п. ф-лы, 3 ил. G (Л to 
| СПОСОБ РЕМОНТА НАСОСНОЙ ШТАНГИ | 2010 |
|
RU2406815C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
