Изобретение отнссится к автоматике ,й вычислительной технике и предназначено для контроля и управления добычными работами, проводимыми с использсеанием автосамосвапов и экскаваторов на карьерах предприятий, добывающих нерудные полезные ископаемые шветной и черной металлу{я ин.
Известна система содержащая блок куска в снвфазированиЯ| распределители импульсов, коммутаторЫ| регистр команд и номеров пунктов, счетчик опрошенных объектов, дешифрат(, блок логических схем схему управления, приемопередающий блок, вычислительный блок, блок вывода решения, схемы ИЛИ, селектсф импульсов, блок ситуадви на объектах, блок когггропя дайжения транспорта, блок уч&та работы объектсж, блок икштацни, блок опроса, указатель маршрутов и ситуаций, блок контроля связи, формирования реясюлов l.
Недостатками этой системы является ее сложность и необходимость ручного
ввода информации о номере погрузившего автосамосвал экскаватора, необходимость применения ручного труда при вводе инфсфмации в ЭВМ.
Наиболее близкой по техническсЛ сущности к изобретению является система, содержащая пункт управления (ПУ), к которому кондуктивно присоединено устройство для взвешивания груженых автосамосвалсе на ходу и пространственгtoно разделенными кансшами связи (ПРК) связан с ко№гролируемыми пунктами (КПА), установленными на автосамосвалах, а также контролируемые пункты, устанс ленные на экскаваторах (КПЗ)
IS а связанные с КПА прост15анственно ра деленными каналами связи, а с ПУ радиоталеметрическими каналами (РТМК) И.
20
Выполнение функгшй управления в данной системе возможно с помошью вычислительнетх) комплекса, включающего универсальвую управляющую ЭВМ.
Работа системы по закрытому циклу (адреюа пунктов погрузки автосамосвалов остаются постоянными в течение смены или, по крайней мере, до корректировки сменного плана) происходит следующим образом.
При въезде в карьер в начале смены .через антенну пункта управления каждому автосамосвалу оператор системы, используя наборное -попе, вьщает фиксированный адрес пункта погрузки и разгрузки, который индицируется водителю на табло КПА Далее в течение смены происходит автоматическое опознавание и взвешивание загруженных автосамосвалов на ходу при проезде их по грузоприемной площадке устройства для взвешивания автосамосвалов, установленногх) на выезде из карьера, регистрация и индикация на пункте управле5шя текущей и итоговой информации.
При работе системы по открытому циклу ПУ опоонает номер автосамосвала во время его въезда в карьер по сигналам КПА и выдает ему, также по ПРК, определенный с помощью ЭВМ адрес погрузки. Вьщанный адрес пункта погрулки индицируется водителю на табло адресации.
Во время подъезда автосамосвала к экскаватору с КПА по ПРК автоматически передается информация о номере автосамосвала на КПЗ, откуда информация о номере автосамосвала и экскаватора передается по РТМК на ПУ.
При выезде автосамосвала из карьера на устройстве для взвешивания по номеру автосамосвала определяется номер погрузившего его экскаватора, а водителю индицируется на внешнем табло ПУ номер его автосамосвала, вес вывозимой им горной массы и адрес пункта разгрузки.
Недостатком системы является несоверщенность применяемого в ней способа взвешивания, предполагающего непроизводительные затраты времени (несколько минут на каждый рейс), что приводит к потерям более чем 1О% числа рейсов. Для современных карьеров с разветвленной сетью транспортньк коммуникаций при наличии многочисленных нестационарных пунктов погрузки R разгрузки применяемый способ предопределяет наличие нескольких дорогостоящих в изготовлении и монтаже весовыхустановокш карьере, а то усложняет и удорожает горно-транспорттый процесс и требует
больших единовременных затрат на внедрение системы в производство. Кроме того, в случае вьщачи адреса погрузки перед отказом экскаватора за время, меньшее времени, необходимого для преодоления самосвалом пути от пункта аДрпсчции до экскаватора, наблюдается неопределенность в управлении, для устранения которой водителю необходимо вести автосамосвал из карьера вновь к пункту адресации, что мало приемлемо на практике.
Цель изобретения - повьшзение производительности и экономичности.
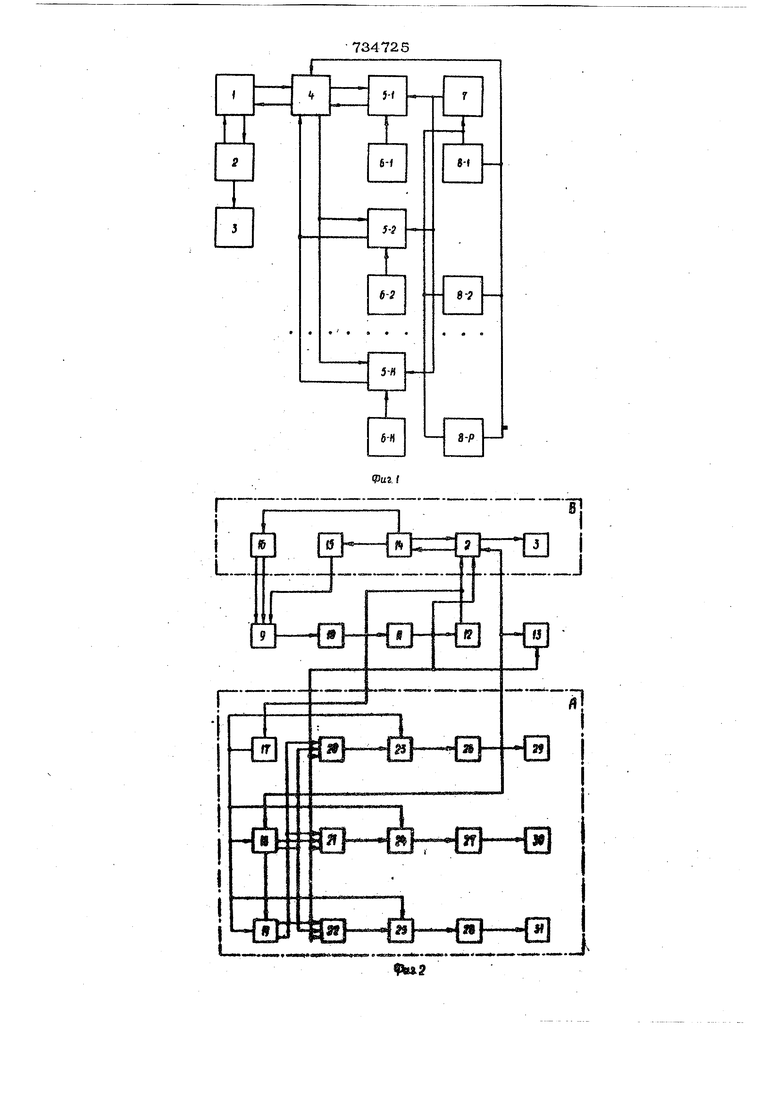
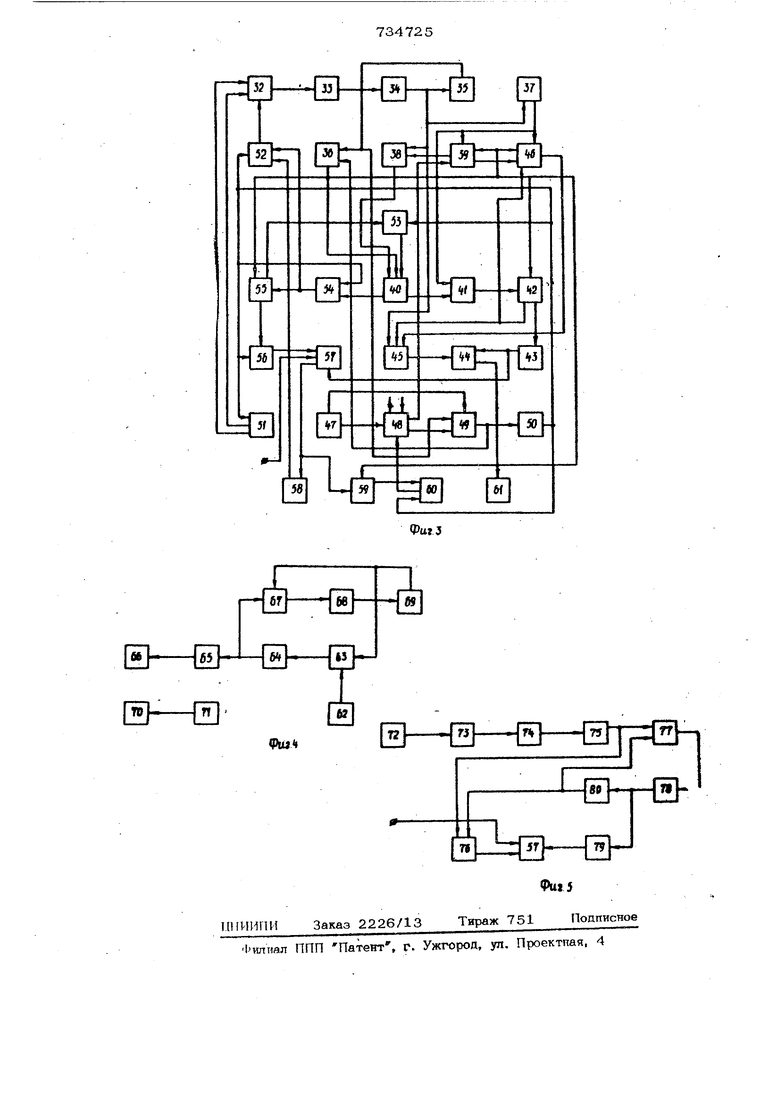
Поставленная цель достигается тем, что в системе для контроля и управления автомобильно экскаваторными комплексами, включающей пункт управления, ЭВМ, устройство регистрации и отображения информации, вход которого соединен с первым выходом ЭВМ, пункт-упраления связан радиотелеметрическим каналом с контролируемыми пунктами экскаваторов, которые связаны пространственно разделенными каналами с кот-ролируемыми пунктами автосамосвалов, вход каждого из которых соединен с выходом соответствующего измерительного преобразователя дaвлe шя, пункт управления, связанный радиотсУ1еметрическим каналом с контролируемыми пунктами автосамосвалов, содержит приемопередатчик, фильтр, релейный элемент, элемент задержки, детектор окончания кодового слова, формирователь импульсрв, частотный модулятор, устройство коммутации, узел сброса, два триггера, три элемента И, три счетчика, три преобразователя код-напряжение и три измерительных устройства, причем вьгход приемопередатчика соединен с входом фильтра, выход фильтра соединен с аходом релейного элемента, выход которого соединен с входами элемента задержки, детектора окончания кодового слова и первыми входами ЭВМ и элементов И, выход элемента задержки подключен ко второму входу ЭВМ и входу узла сброса, выход детектора окончания кодового слова соединен со счетным входом первого триггера и с третьим аходом ЭВМ, первый выход формирователя импульсов соединен со входом частотного модулятора, второй вьрсод - со входом устройства коммутации, третий выход подключен к четвертому входу ЭВА1, первый и второй выходы устройства коммутации соединены оответствепно с первым и вто5рым входами приемопередатчика, третий вход которого подключен к вьгходу частотного модулятора, выход узла сброса подключен к управляющим входам тригг ров и счетчиков, первый выход первого триггера подключен ко вторым входам первого и третьего элементов И, второ вькод первого триггера соединен со вто рым входом второго элемента И, первый выход второго триггера подключен к третьим входам первого и второго элементов И, второй вьсход соединен с третьим входом третьего элемеш-а И, выход каждого элeмe пa И подключен ко входу соответствующего счетчика, выход которого через соответствующий преобразователь кодг-напряжение соедкне со входом соответствующего измеритель ного устройства, третий выход первого триггера подключен к счетному входу второго триггера, вход формирователя импульсов подключен ко второму выходу ЭВМ, каждый контролируемый пункт автосамосвала содержит приемопередатчик, два фильтра, два релейных элемент четыре элемента задержки, два уэпа сбр са, детектор окончания кодового слова, девять элементов И, два запоминающих устройства, четыре счетчика, три тригге ра, формирователь импульсов, устройств коммутации, частотный модулятор, цифро вой индикатор, антенну, приемник, два элемента НЕ, причем выход приемопередатчика подключен к входу дервого фильтра, выход которого через первый ропейный элемент соединен со входами первого элемента задержки, детектора окончания кодового слова и первыкш входами первого и второго элементов И, выход первого элемента задержки подключен к первым входам первого уапа сброса н третьего элемента И, вы ход первого узла сброса соединен с управляющими входами 3anoNBiHaiomHX устройств, первого счетчика, первого, второго и третьего триггеров, выход детектора окончания кодового слова подключен к первому аходу первого запоминающего устройства, первому входу второго запоминающего устройства к первому входу четвертого элемента И, выход первого элемента И соединен с первьйл входом первого счетчика, первый и второй выходы первого запомй нающего устройства подключены соот ввтственно ко второкг/ аходу второго .запоминающего устройства и ко втором ОБХОДУ первого элемента Ив выходы пер вого счетчика соединены соответстве но со вторым входом четвертого элемента И и с первым входом пятого элемен- та И, выход четвертого элемента И соединен; со входом первого триггера, первый выход которого соединен с третьим входом второго запоминающего устройства и со вторым входом второго элемента И, второй выход аервого триггера подключен ко входу второго узла сброса, выход которого соединек с управляющими входами второго и третьего счетчиков, выход второго счетчика соединен со аходом цифрового индикатора, вход подключен к вьосоду второго элемента И, третий вход которого соединен с выходом второго запоминающего устройства, первый четвертого счетчака соединен со вторым входом третьего элемента И, второй выход подключен ко втopo y входу первого запоминающетчз устройства, управлдаощие аходы четвертого счетчика соединены соответственно с управляющими входами контролируемого пункта автосамосвапа, первый вход подключен к выходу шестого элемента И, выход третьЕвго элемешга И соединен со входом формирователя ;И№1уп1гсов и со вторым входом первого узда сброса, вь1Ход формироватапя ныиульсов подключен к первым входам частотного модулятора, шестого, седькюго и восьмого элементов И,ко второму входу пятого элемента И и ко входу устройства комму тацин, выходы которого подключены соответственно к первому и второму аходам прйекюпередатч йка, третий кход которого соединен с выходом частотного модул5ггора, выход элемента И соединен со вторым входом первого счетчика, пятого элемента И подключен ко входу i второго триггера, и ко второму входу частот-. ,ного модулятора, выходы второго триггера подключены соответственно ко вторым входам седьмого и восьмого элементов И, выход которого под1шючен к первому кходу третьего счетчика, выход которого соединен со входами второго элемента задержки и третьего триггера, выход второго элемента задержки подключен к третьему входу частотного мояул5ггора, выход третьего триггера соединен со вторым входом шестого элемента И, выходы да(г« чика величины перевезенного груза подключены соответственно ко второму входу четвертого счетчика и к третьему входу третьего элемеята И, второй вход третьего счетчика соединен с выходом девятого элемента И, выход а ггеннь подключен через последойатапько соединенные приемник, второй фияьтр и второ рапейный элемент к первому входу перво го элемента НЕ, выход второго релейного элемента соединен с первым входом девятого элемента И, выход первого эле мента НЕ через последоваташино соединенные третий и четверть1й элементы задержки подключен ко вторым входам первсвч) элеметга НЕ и девятого элемента И, выход третьего элемента задержки че,рез второй элемент НЕ соединен с третьим входом третьего счетчика, каж дый контролируемый пункт экскаваторов содержит коммутационный элемент, триггер, формирователь импульсов, генератор антенну, счетчик, элемент задержки, эле мент НЕ, датчик времени и устройство связи с пунктом управления, вход которо го соединен с вьсходом датчика времени, выход коммутационного элеметга соединен с первым входом триггера, выход которого через формирователь импульсов соединен со входом генератора и с первым входом счетчика, вьрсод генератора соединен со входом антенны, выход счет чика через элемент задержки подключен ко входу элемента НЕ, выход которого соединен со вторыми входами триггера и счетчика, Такое построение системы позволяет устранить непроизводительные затраты времени на взвешивание и неопределен ность в управлении, так как в случае неопределенности водителю при неисправностй экскаватора автоматически или после запроса по радиотелеметрическому каналу вьщается новый адрес погрузки с учетом местонахождения автосамосвала. Кроме того, в системе отсутствуют ствг ционарные весовые установки, что существенно снижает затраты на оборудование и монтаж, а внедрение может производиться последовательно, по этапам:, В системе возможно одновреманло использовать радиосташши для пэредачи речевых сообщений. На фиг, 1 представлена блок-схе ла системы, на фиг, 2 ,- схема пункта управления системы; на фиг, 3 - часть блок-схемы контролируемого пунхта автосамосвалов, относящаяся к радяотеламеггрическому каналу; на фиг, 4 показана блок-схема контролируемого пункта экскаваторов; на фиг, 3 - частьблок-схемы контролируемого пункта автосамосвалов, относящаяся к простра ственно разделенным каналам. Устройство содержит пункт управления (ПУ) 1, электронную вычислительную машину (ЭВМ) 2, устройство 3 регистрации и индикации, радиоталеметри-. ческий канал (РТМК) 4, контролируемьш пункты автосамосвалов (КПА) 5-1-5-К (К - число автосамосвалов), измерительные преобразователи давления 6-1-6 К, применяемые в гидросистеме подъема кузова пространственно -разделенные каналы (ПРК) 7, кошгролируемые пункты экскаваторов (КПЗ) 8-1-8-Р (Р - число экскаваторов). Пункт управления системы (см.фиг.2) состоит из приемопередатчика 9, фильтра 10 и релейного элемента 11, предназначенных для выделения и формирования принятых телемеханических импульсов, элемента 12 задержки для задержки времени начала работы передатчика НУ, служащего цели разделения времени работы передатчиков ПУ и контролируемого пункта, детектора 13 окончания кодового слова, необходимого для разделения кодовых слов при обмене информацией между ПУ и контролируемыми пунктами, формирователя 14 . импульсов, частотного модулятора 15, устройства 16 коммутации для переключения режима работы приемопередатчика 9, узла 17 сброса, триггерного суммирующего счетчика, построенного на триггерах 18 и IQj- и вместе с элементами И 2О, 21 и 22, используемого для последовательного подключения выхода релейного элемента 11 - ко входам счетчиков 23, 24 и 25, служащих для запоминания информации о номере выполнившего рейс автосамосвала, номере погрузившего его экскаватора и величине перевезенного груза соответственно, преобразователей коднапряжение (ПКН) 26-28 и измерительных устройств 29-31, по показаниям которых можно судить о контролируемых параметрах работающих экскаваторноавтомобильньпс комплексов. Часть КПА (см. фиг. 3) включает приемопередатчик 32, фильтр 33, рапейный элемент 34, элемеьгт 35 задержки, узел 36 сброса, детектор 37 окончания кодового слова,элемент И 38, запоминающее ух тройство 39, счетчик 40, элемент И 41, триггер 42, узел 43 сброса, счетчик 44, элемент И 45, запоминающее устройство 46, датчик 47- величины перевезенного груза, счетчик 48, элемент И 49, формирователь 50 импульсов, устройство ,51 коммутации, частотный моЦупятор 52, элементы И 53,54, триггер 55, элемент И 56, счетчик 57, элемент 58 задержки, триггер 59, элемент И 6О цифровой индикатор 61, Контролируемый пункт экскаваторов (см, фиг. 4) включает коммутационный элемент 62, триггер 63, формирователь 64импульсов, генератор 65, антенну 66 счетчик 67,.элемент задержки 68, эл8мет: НЕ 69, устройство 7О связи с пунктом управления,датчик 71 времени. Часть КПА (QM. фиг. 5) содержит антенну 72, приемник 73, фильтр 74, релейный элемент 75, элемент И 76, элемент НЕ 77, элемент задержки 78, элемент НЕ 79, элемент задержки 8О. Система для контроля и управления по закрытому циклу (при этом в ПУ1 используется необведенная на фиг. 2 часть схемы и обведенная часть,обозначанная буквой А) работает следующим образом. Водителю в начале смены диспетчер вьщает фиксированный адрес погрузки и разгрузки. Во время погрузки, при откр вании машинистом экскаватора днища ко ша происходит замыкание элемента 62 (фиг. 4), механически сблокированной с ручкой открывания днища. Далее изменяет свое состояние триггер 63, что вызьшает запуск формирователя 64, который формирует прямоугольные импульс с фиксированной длительностью и периодом. Эти импульсы запускают генератор 65, вырабатьшаюЕщй сигнал частотой 1071 ГЦ. К выкоду генератора 65присоединена антенна 66. Импульсы с выхода формирователя 64 поступают также, на вход счетчика 67. Счетчик 67 при включении напряжения питания устанавливается с помощью элемента НЕ 69 в состояние, соответствующее дополнительному коду данного экскаватора. При переходе счетчика 67 из состояния заполнения в нулевое положение срабатьюает элемент задержки 68, что приводит к срабатыванию элемента НЕ 69, переходу счетчика 67 в начал ное состояние, соответствующее дополнительному коду данного.экскаватора, возврату триггера 63 в исходное положение и прекращению передачи импупьгсов по , Импульсы, излучаемые антенной 66, улавливаются антенной 72 КПА ПРК (см, фиг. 5), Принятые импульсы усиливаются приемником 73, фильтруются фильтром 74, фо)мируются с помощью : релейного элемента 75 и поступают Н вход элемента НЕ 77 и вход элементна И 76. С выхода элемента НЕ 77 первый принятый импульс запускает эле.мент задержки 78, что вызывает сраб тьта1ше элемента НЕ 79 и перевод счетчика 57 в нулевое состояние. После окончания выдержки времени элементом 78 запускается элемент задержки 80, что приводит к появлению на вхо- . дах элементов НЕ 77 и И 76 сигнала, запрещающего срабатьшание элемента 77 и разрещающего прохождение сигналов со входа элемента И 76 на вход счетчика 57. Таким образом информация о номере загрузившегб самосвала экскаватора передается по ПРК от КПЗ 8-1-8-Р в счетчик 57 КПА 5-1-5-К (фиг. 1).. Загрузивщийся автосамосвал направляется к месту разгрузки и разгружается. До момента отрьша кузова от peiMbt давление в гидросистема подъема возрастает с определенной скоростью, в момент отрьша оно имеет максимальную величину и спадает со скоростью в десятки раз меньшей, чем скорость нарастания давления. Поэтому для измерения величины груза использован участок кривой изменения давления фиксированной длительности, начиная от момента времени, соответствующего максимальному значеншо давления в системе грузоподьема (точка перегиба определяется дифференцирующими звеньями измерительных преобразователей 6-1-6-КУ. В качестве чувствительных элементов датчиков измерительных преобразователей 6-1-6-К можно применять дифференциальные струнные преобразователи давления в частоту импульсов, построенные на2-х струнах, которые имеют противоположные по знаку деформации.; Вследствие этого появляется возможность установить начальную частоту сигнала, равную нулю. Текущая частота выходных, сигналов такого датчика определяется как разность частот колебаний струн. При включении ручки управления подъемом кузова самосвала от сблокированной с ней кнопки подается сигнал на управляющий вход (Счетчика 48 (см. фиг. 3). По истечении фиксированного отрезка времени, стсчитьюаемого от момента времени, соответствующего максимумудавления, определяемого задержкой времени датчика 47, в счетчике 48 запоминания величины груза КПА разгружающегося автосамосвапа завератается кякопле- li7 чие числа импульсов, пропорционального весу перевезенного груза. При накопле кии в счетчике 48 числа импульсов, рав половине емкости счетчика, на входе элемента И 49 появляется сигнал низкого уровня. Если при этом на выхо де датчика 47 инверсный выход задержки времени на измерение и. выходе элемента задержки 35 имеются сигналы нулевого уровня, что указьшает на отсутствие в РРМК Других сигналов и на окончание процесса измере1шя, то на выходе элемента И 49 появляется потенциал нулевого уровня, который запускает узел сброса 36 и формирователь импульСОВ 5О, Узел сброса генерирует импуль переводящий все элементы памяти, кроме счетчиков 48 и 57, в исходное положение. Формирователь вырабатывает импульсы, поступающие на вход элементов И 53,60, С выхода триггера 55 на вход элемента И 58 также поступает сигнал нулевого уровня, элемент И 53 пропускает на вход счетчика 4О сигналы формирователя 5О, При накоплении в счетчике 4О числа импульсов, соответствующего номеру данного самосвала, на выходе его появляются сигналы нулевого уровня, которые передаются на вход элемента И 54, При появлении очередного импульса формирователя на выходе элемента И 54 возникает импульс, запрещающий работу частотного модулятора и своим задним фронтом персбрасьшаюищй триггер 55 в противоположное состояние, В результате этого пропускается очередной импульс в передаваемой приемопередатчиком 32 последовательности импульсов, обозначающей номер данного автосамосвала, частотный модулятор 52 и приемопередатчик 32 управл5потся импульсами формирователя 5О, причем приемопередатчик управляет ся через устройство коммутации 51 и: появляется сигнал нулевого уровня на входе элемента И 56 и на его выходе, что обеспечивает прохождеш е импульсов формирователя 5О на вход счетчика 57. При этом приемопередатчик в такт с формирователем 5О начинает передавать следующую последовательность импульсов, представляющую из себя д(попнительный код номера экскаватора, загрузившего данный автос;амосвал. При заполнении и пере-ходе счетчика 57 в нулевое состояние сигнат с пго вькода поступает на вход элемента заитаржки 5 что запрещает работу модулятора на 5 время, в течение которого появляется последующий импульс формирователя 5О Вместе с этим изменяет свое состояние триггер 59, в результате чего импульсы формирователя 5О начинают прохооить с выхода элемента 60 на вход счетчика 48, Далее приемопередатчик 32 в такт с импульсами формирователя 5О передает третью последовательность импульсов, соответствующую дополнительному коду величины перевезенного самосвалом груза. При заполнении и п&раходе счетчика 48 в нулевое состояние с выхода элемента И 49 снимается потегщиал нулевого уровня что вызывает прекращение работы формирователя 5О и окончание передачи сообщения от данного КПА к ПУ 1 по радиотелеметрическому каналу, Если РТ/ЛК до начала передачи бьт занят, то сигналы, принятые приемником приемопередатчика 32, отфильтрованные и сформированные элементом 34, поступают на вход элемента 35 и вызывают появление потенциала высокого уровня на выходе элемента 35 и,следовательно, на входе элемента И 49, Это задерживает передачу сообщения данного КПА до освобождения РТМК и окончания -вььдернски времени элементом 35 после прохождения последнего сигнала переданного сообщения. Если же два источника сообщения (ИС) включились па передачу одновременно, то во время окончания более короткого первого слова (у того или другого ИС) на выходе элемента 35 появляется потенциал высокого уровня, перводящийс помощью узла сброса 36 счетчик 40 в начальное состояние и временно запрещающий прохождение через элемент И 49 инициирующего передачу сообщения КПА с более коротким первым кодовым словом сигна- ла, поступающего с выхода счетчика 48, Дальнейшее прохождение сигнала невыклю- чивщегося ИС по схеме выключившегося запрещено, так как потенциал вьюокого уровня с выхода счетчика 48 исключает срабатьшание запоминающего устройства 39 выключивщегося ИС. Сигналы, передаваемые данным КПА по РТИК 4 (см. фиг, 1), принимаются приемопередатчиком 9 (см, фиг, 2), фильтруются и формируются рвлейньп 1 элементом 11 и поступают на элемет-а 12 задержки детектора .13 окончания кодового слова (по закрытому шгклу работает необвед нная часть ЦУ п обведегшая, обозначенная на фиг, 2 буквой А) и на входы элементов И 20, 21, 22, При приеме первого импульса срабатывает элемет- 12, вследствие чего запускается узел 17 сброса и переводятся в исходное состояние триггеры 18 19 и счетчики 23-25, Триггеры 18, 19, установленные в исходное положение обеспечивают ирокождение первого кмпульса от элемента 11 через элемент И 2О на вход счетчика 23, После приема группы импульсов, соответствующей первому кодовому слову, срабатывает детектор 13, что вызывает изменение состояния триггера 18 и прохождение импульсов с выхода э..емента 11 на вход счетчика 24, После окончания второго кодового слова выход элемеига 11 таким же образом переключается на аход счетчика 25, Преобразователи код-напряжение 26-28 преобразуют принятую информацию, а измеритель ные устройства 29, ЗО и 31 показывают соответственно, номер разгрузившегося автосамосвала, номер погрузив- щего его экскаватора и величину перевезенного груза. Эта информация вместе с информацией о времени разгрузки может служить исходным материалом для ведения учета работы автомобильноэкскаваторных комплексов, По открытому циклу система работает следующим образом, В начале смены водитель выехавшего на линию самосвала нажатием кнопки на КПА переводит последний триггер счетчика 48 в состояние , При свободном радиотелеметрическом канале (или в порящке очереди) начинается п&редача кода автосамосвала на ПУ, номера загрузившего экскаватора (число импульсов равно полной емкости счетчика 57) и кода величины груза (число импульсов равно строго половине емкости счетчика 48). Указанные числа импульсов во втором, и третьем кодовых словах являются для ЭВМ системы иденти4я1к тором факта запроса адреса погрузки. По окончании ввода в ЭВМ этой нвфо{ мации согласно принятого алгоритма управления и введенного заранее в ЭВМ плана горных работ определяется адрес пункта погрузки, которьй передается по РТМК на КПА запросившего адрес погрузки самосвала, Процесс формирования этого сигнала .на ПУ аналогичен опиг-тниому выше прсь цессу формирования передаваемого по iPTMK на КПА, При поступлении сигнала от ПУ в РТМК 4 он принимается приемниками всех КПА, фильтруется, формируется релейным элементом 34 и поступает на входы элемента 35 и детгектора 37, Элемент 35 приводит в действие узел сброса 36 триггеров КПА и запрещает прохождение инициируюш.его передачу КПА сигнала на выход элемента И 49, С выхода детектора 37 исчезает сигнал нулевого уровня, а запоминающее устройство 39 подготавливается к срабатьшанию. По окончании первого кодового слова (кода ПУ) срабатывает запоминаю|щее устройство 39 и подается сигнал на вход элеме1Па И 38, что обеспечивает прохождение импульсов второго кодового слова (кода запросившего адрес погрузки автосамосвала) на вход счетчика 40, По окончании второго кодового слова на вьсходе счетчика 4Q адресуемо- го автосамосвала появляются сигналы нулевого уровня, которые подаются на вход элемента И 41,: На вход элемента И 41 по окончании кодового слова также поступает сигнал нулевого уровня детектора о 7, Сигнал нулевого уровня переключает триггер 42, который приводит в действие узел сброса 43, Счетчик 44 подает сигнал нулевого уровня на запоминающее устройство 46, разрешает про(сождение импульсов третьего кодового слова (адреса экскаватора) с выхода элемента 34 через элемент И 45, на рход счетчика 44, По окончании третьего кодового слова на входе устройства 46 появляется сигнал нулевого уровня, Запоминающее устройство 46 срабатывает, запрещает прохождение сигналов на вход счетчика 44 через элемент И 4 5, а цифровой индикатор 61 показьшает водитапю адрес погрузки.; Далее система работает так же, как и по закрытому циклу. Если водитель самосвала, подьехав к экскаватору, обнаружил, что он неисправен, то нажаггием кнопки на КПА водктеяь запрашивает у ПУ новый адрес погрузки, Сигналы исправности (или неисправности) передаются с КПЭ с помощью устройства связи 70 с пунктом упра&ления аналогично передаче сигналов с КПА на ПУ 1 по РТМК. Эти сигналы передаются через каждые 15 мин , под влиянием импульсов, поступающих на в.ход устройства связи 70, с выхода .датчика времени 71. Формула изобретения Система для контроля и управления автомобильно-экскаваторными комплексами, включающая пункт управления, ЭВМ, устройство регистршши и отображения информации, вход которого соединен с первым выходом ЭВМ, пункт управления связан радиотелеметрическим каналом и контролируемыми пунктами экскаваторов, которые связаны пространственно разделанными каналами с котгропируемыми пунктами автосамосвалов, вход каждого из которых соединен с выходом соответствеющаго измеритель ного преобразователя давления, отличающаяся тем, что, с цепью повышения производительности и экош мичности в ней пункт управления, связанный радиотеламетричаским каналом с контролируемьпли пунктами автосамосвалов, содаржит приемопередатчик, фильтр, релейный элемент, элемент задержки, детектор окончания кодового ел йа, формирователь импульсов, частотный модулятор, устройство коммутации, узея с&роса, два триггера, три элемента И, три счётчика, три преобразователя код-напряж ние и три измерительных устройства, приче вькод приемопередатчика соединен с вхо дом фильтра, вьсход фильтра соединен с входом релейного элемента, выход кото рого соединен с входами элемента задержки, детектора окончания кодового слова- и первыми входами ЭВМ и элемен тов И, выход элемента задержки подклю чен ко второму входу ЭВМ и входу узл сброса, выход детектора окончания кодо вого слова соединен со счетным входом первого триггера и с третьим входом ЭВМ, йарвый выход формирователя ик пульсов соединен со входом частотного модулятора, второй выход - со входом устройства коммутации, третий выход подключен к четвертому входу ЭВМ, пар вы я второй выходы устройства коммутации соединены соответственно с первым и вторым входами приамоп едатчи ка, дретий вход которого подключен к выходу частотного модулятора, выход узла сброса подключен к уг1равл$по11щм Екодам триггеров и счетчиков, первый выход первого триггера подключен ко вторым входам первого и третьего элементов И, второй выход первого тригг&ра ссюдинен со вторым входом второго элемента И, первый выход второго триггера подключен к третьим аходам перво--го и второго элементов И, второй выход соединен с третьим входом третьего элемента И, выход каждого элемента И подключен ко входу соответствуюшего счет.чика, выход которого через соответствую- ший преобразователь код-напряжение соединен со входом соответствующего измерительного, устройства, третий выход первого триггера подключен к счетному яхрду второго триггера, вход формирователя импульсов подключен ко второму выходу . ЭВМ, каждый контролируемый пункт автосамосвала содержит приемопередатчик, два фильтра, два репейных элемет-а чатыре алеманта задержки, два узла сброса, детектор окончания кодового слова, девять элементов И, два запоминающих устройства, четыре счетчика, три триггера, формирователь импульсов, устройство коммутации, частотный модулятор, цифроЬой индикатор, антенну, приемник, два элемента НЕ, причем выход приемопередатчика подключен к входу первого фильтра, выход которого через первый релейный элемент соединен со входам и первого элемента задержки, детектора окончания кодового слова и первыми входами первого и второго элеме тов И, выход первого элемента задержки подключен к первым входам первого узла сброса и третьего эламанта И, выход первого узла сброса соединен с управляющими входами запоминающих устройств, первого счетчика, первот о, второго и третьего триггеров, выход детектора окончатся кодовых слов подключен к первому входу первого запоминающего устройства, первому входу второго запоминающего устройства и к первому входу четвертого элемента И, выход первого элемента И соединен с первым аходом первого счетчика, первый и второй выходы первого запоминающего устройства подключены соответственно .ко второму входу второго запоминающего устройства и ко BTOpONity аходу первого элемента И, выходы первого счатчика соединены соответственно со вторым аходом четвертого эламетга И и с пе{)вым входом пятого элемента И, выход четвертого элемента И соединен со входом первого триггера, первый вькод которого соединен с третьим входом второго зaпo ПIнaюu er o устройства и со вторым входом второго эл9ме1гга И, второй В191ход первого трнттпра подключен ко входу второго узла сброса, выход кото ,рого соединен с управляющими входами второго и третьего счетчиков, выход второго счетчика соединен со входом цифрового индикатора, вход подключен к выходу второго элемекга И, третий вход которого соединен с выходом второго запоминающего устройства , , первый выход четвертого счьтчика соединен со вто рым входом третьего элемеета И, второй вьсход подключен ко второму Exctду первого запоминающего устройства, управляющие входы четвертого счетчика соединены соответственно с управляющими входами контролируемого пункта автосамосвала, первый аход подключен к выходу шестого элемента И, выход третьего элемента И соединен со входом форми ровепгеля импульсов и со вторым входом первого узла .сброса, выход формироватвля импульсов подключен к первьпис входам частотного модулятора, шестого, седьм« го и восьмого элементов И, ко второму входу пятого элемента И и ко входу ус-рройства коммутации, выходы которого .подключены соответственно к первому и второму входам приемопередатчика, третий вх.од которого соединен с выходом частотного модулятора, выход седьмого элемента И соединен со вторым входом первого счетчика выход пятого элемента И подключен ко входу второго триггера и ко второму входу частотного модуиято ра, выходы второго триггера подключены соответственно ко вторым входам седьмого и восьмого элементов И, выход которого подключен к первому входу третьего счетчика, выход которого соединен со входами второго эламеш-а aseдержки и третьего триггера, выход второго элемента задержки подключен к третьему входу частотного модулятора, выход третьего триггера соединен со вторым входом шестого элемента И, Bt ходы датчика величины перевезенного груза подключены соответственно ко вто pOKty аходу четвертого счетчика и к третьему входу третьего элемента И, второй вход третьего счетчика сс ед11нен с вьсходом девятсжо элемента И, выход антенны подключен через последоватепьно соединенные приемник, второй 4«и1ьтр и второй релейньй элемекг к первому входу первого элемеврга НЕ, выход второго релейного элемента соединен с первым входом девятого элемаета И, выход первого элекюнта НЕ через последовательно соединенные третей и четвертый элементы задергюси подключен ко вторым входам первсаго элемента НЕ и девятого элемента И, выход третьих элемента задержки через второй элемеиг НЕ соединен с третьим входом третьего счетчика, каждый контропируемый пункт экскаваторов содержит коьшутационный элемент, триггер, формирователь импульсов, генератор, ат-енну, счетчик, элемент задержки, элемент Н1. датчик времени и устройство связи с пунктом управления, вход которого соешгоен с выходом датчика времени, выход коммутационного элетлешга соединен с первым входом триггера, выход котч кза:ч через формирователь импульсов соединеа со входом генератора н с первым входом счетчика, выход генератора соединен со входом антенны, выход счетчнка через элемент задержки подключен ко входу элиленга НЕ, выход которсяч соединен со входами триггера: в счетчика. Источники информахщи, принятые во внимание при экспертизе 1,Авторское свидетельство СССР N9 485457, кл. Q Об F 15/46, 1973. 2,Маматов А. Г, Исследование н разрабсхгка системы оперативного nnaimpoвания и управления добычными работами на карьерах. Автореферат диссертации на соискание ученой степени кандидата, технических наук.. Свердловск, 1975 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1978 |
|
SU734727A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Устройство для учета производительности транспортных средств добывающего комплекса | 1988 |
|
SU1712951A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| Устройство для определения номера транспортного средства | 1988 |
|
SU1555169A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Устройство для сопряжения вычислительной машины с магистралью обмена | 1986 |
|
SU1381519A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛОЧНЫМ ПЕРЕВОДОМ | 1998 |
|
RU2147008C1 |
| Устройство для ввода изображения в ЭВМ | 1986 |
|
SU1432494A1 |
Г
