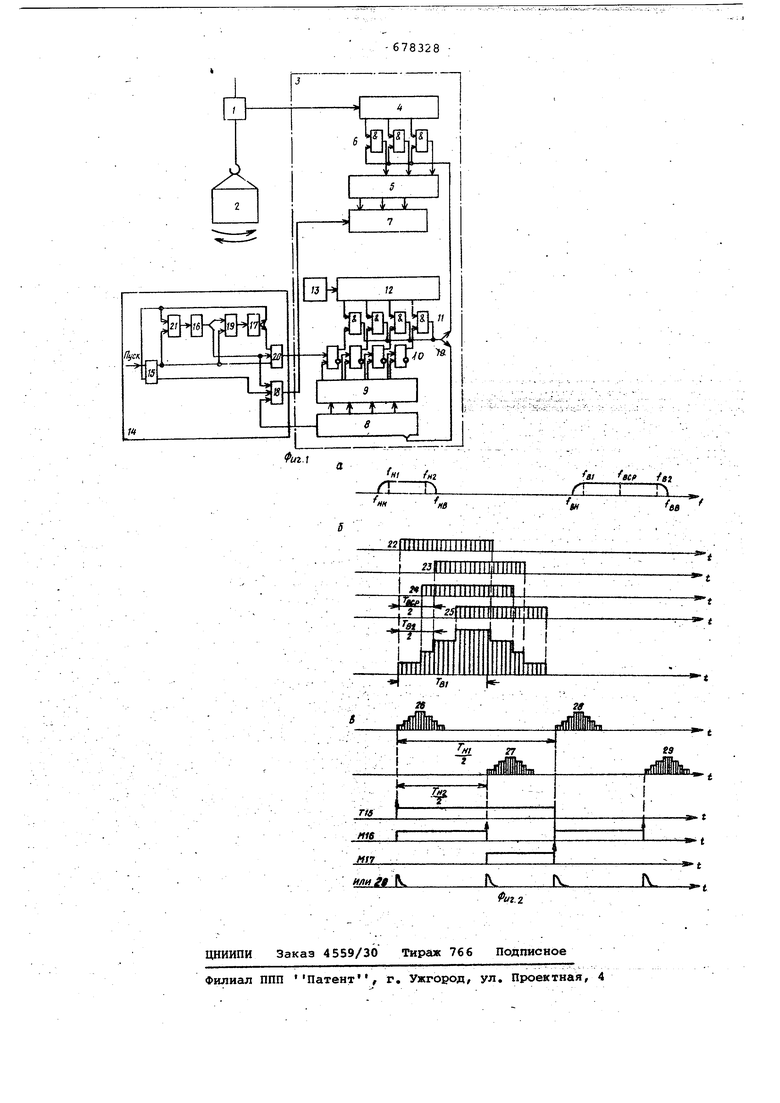
Изобретение относится к весоизмерительной технике, используемой пре имущественно для взвешивания движу щихся грузов, перемещаемых кранами, является усовершенствованием изведт ного устройства, защищенного основным авт.св. № 300774. Основным авт.св. 300774 защимен устройство, используемое для вэвешивания движущегося транспорта. Это устройство состоит КЗ грузовой платформы с тензометрическими силсжзмери телями, преобразователя аналог код/связанного через ключевую схему с интегратором, выходного устройства и блока формирования сигналов, которой содержит программирующий счетчик общего числа измерения, соединенный с .триггерами управления через дешнфратор вентилями, входы которого связан с распределителем импульсов генерато ра переменной частоты, а выходы - с ключевой схемой. Однако известное устройство не обеспечивает достаточной точности, так как при движении грузов, перемещаемых краном, возникают большие погрешности вследствие того, что, кроме высокочастотньи помех -типа вибраций в грузоподъемных ,канатах с частотой порядка 5 - 20 Гц В системе возникают низкочастотные помехи маятниковых колебаний (частота составляет 0,1-0,5 Гц и зависит от длины грузоподъемного контакта) , позтому оно не ожет быть использЬва1Й6 в кравгевах весах. Целыа изобретения является повышение точности взвешивания движущихся грузов. Эта цель достигается тем, что описываемое устройство снабжено задатчнком 2 пусковых импульсов, попарно сдвинутых на половину пери- одов га расчетных частот с максималь;НБМ подавлением динамических помех в спектре маятниковых колебаний, выполненным на цепочке заторможенных мультивибраторов и логических схем и соединенным с блоком управления измерениями. Г На фиг. 1 представлена функциональная схемаГ устройства; на фиг. 2 - временные диагракв ы, поясняющие принцип работы устройства при взвешивании грузов, перемещаемых краном. Устройство содержит тензометрический силоизмеритель 1, который выдает сигнал, пропорциональный весу поднятого груза 2 и динамическим помехам в колебательной системе, измерительный прибор 2, состоящий из прёоб:разователя 4- аналог-код, интегратора 5, ключевой схемы б , выходного регистрирующего блока 7, программирующего счетчика 8 числа измерений в цикле, дешифратора 9, триггеров 10 .управления, вентилей 11, распределителя 12 и генератора 13. Устройство снабжено эадатчиком 2 пусковых имцульсов 14, состоящим изпускового триггера 15, заторможенных мультивиб раторов 16 и 17, схем логического умножения И 18 и 19 и схем логическо го сложения.ИЛИ 20 и 21. В качестве примера задатчик выполнен для двух расчетных частот (т 2) и выдает четыре управляющих импульса. При подъеме груза 2 по команде пуск устанавливается в гер 15, который закрывает схему И18 (запрет регистрации),открывает схему И 19 длясвязи между мультивибраторами 16 и 17, возбуждает мультивибратор 16 через схему ИЛИ 21 и через схему ИЛИ 20 подает импульс на триггеры 10 для выполнения устройством первого цикла измерения и обработки сигнала силоизмерителя 1. В этом и последующих аналогичных циклах.обработки сигнала устройство реализует многоинтегральный способ взвешнвания, согласно которому для получения более высокой точности взваливания определяют среднее значение интегралов, где п - число частот высокочастотного диапазона динамических помех, на которых необ ходимо получить нулевую погрешность Для этого, как и в известном устрой стве, производится ввод кода из преобразователя аналог-код в интегратор 5, например, четырех (п вы рано равным 3) интегралов 22, 23, 2 и 25 в соответствии с временной диа раммой (см. (фи.г.2в). Здесь длительность T-g., одного интеграла выбирают равной периоду частоты fg, сдвиг между интегралами 22 и 24, 23 ч 25 равен половине периода - частоты В2 ® сдвиг между парами интегралов 22, 24 и 23, 25 соответствует полупериоду - частоты f-Bcp. В результате первого цикла 26 (фиг. 2Ь) обработки Сигнала исключается погрешиость от высокочастотных вибра ций грузоподъемного каната и металлокон струкций крана в диапазоне частот f«H - (см. фиг.; 2 а,б) . Мультивибратор 16, возвращаясь в исходное положение, возбуждает муль тивибратор 17 через открытую схему И 19 и через схему ИЛИ 20 подает импульсДО1Я шшолнения второго цикл измерения 27. .Мультивибратор 17 при возврате в исходное положение возбуждает мультивибратор 16, за срывающий схему И 18 по второму входу, сбрасывает в О триггер 15, разрывающий связи между мультивибраторами 16 и 17 путем закрытия схемы И 19, и подает через схему ИЛИ 20 импульс для выполнения третьего цикла измерения 28. Мультивибратор 16, возвращаясь в исходное состояние, через схему ИЛИ 20 подает импульс для четвертого цикла измерения 2 и снимает запрет со схемы И 18. -Теперь сигнал с выхода программирующего счетчика 8 Числа измерений в . цикле проходит через схему И 18 и запускает выходной регистрирующий блок 7, Время выдержки заторможенных мультивибраторов устанавливают так, чтобы это время для первого мультивибратора 16 было равно половине периода второй расчетной частоту fH2, а время для второго мультивибратора 17 в сумме Со временем для первого мультивибратбра 16 было рав Тж НО половине ° первой расчетной частоты ц. диапазона помех маятниковых колебаний. Для этого случая каждая полусумма двух пар циклов измерений 26,28 и 27, 29 имеет максимум подавления помехи на расчетной частоте щ и в ее окрестности. Так как пара циклов измерений сдвинута между собой на половину периода расчетной частоты f „j г то с еднеарифметическое от четырех циклов измерений имеет максимум подавления также и на этой частоте и в ее окрестностях ( см. фи г. 2, в) . При необходимости задатчик может быть выполнен аналогично для трех и более расчетных частот (т 3,4...) с более сложными цепочками заторможенных мультивибраторов и логических схем. Формула изобретения Устройство для взвешивания по авт. св. №300774, отличающееся тем, что, с целью повышения точности взвешивания движущихся грузов, перемещаемых краном, оно снабжено задатчиком 2 пусковых импульсов, попарно сдвинутых на половину периода m расчетных частот с максимумами подавления динамических помех в спектре маятниковых колебаний, выполненным на цепочке заторможенных мультивибраторов и логических схем и соединенным с блоком управления измерениями.... V fatf fet
С
ггипшпиниши
ШШ
J|illllillltlt
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1971 |
|
SU300774A1 |
| Устройство для взвешивания | 1980 |
|
SU896422A2 |
| Способ взвешивания быстродвижущихся объектов | 1976 |
|
SU605115A2 |
| Устройство для измерения веса | 1984 |
|
SU1244496A1 |
| КРАНОВЫЕ ВЕСЫ | 1971 |
|
SU301555A1 |
| Устройство для взвешивания в условиях колебания груза | 1983 |
|
SU1142738A1 |
| БЕСКОНТАКТНОЕ ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОПОДЪЕМНЫХ МАШИН | 1966 |
|
SU185508A1 |
| Устройство для взвешивания в условиях колебания грузов | 1977 |
|
SU765662A1 |
| БЕСКОНТАКТНЫЙ ПРИБОР ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ | 1966 |
|
SU188056A1 |