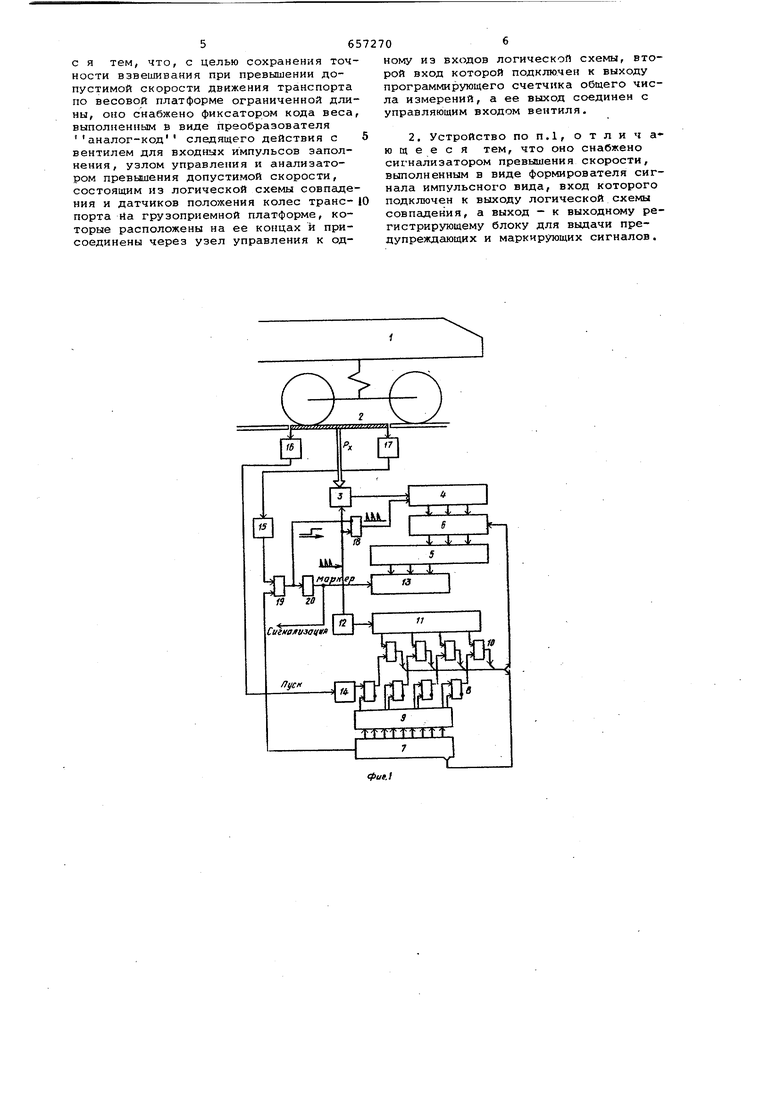
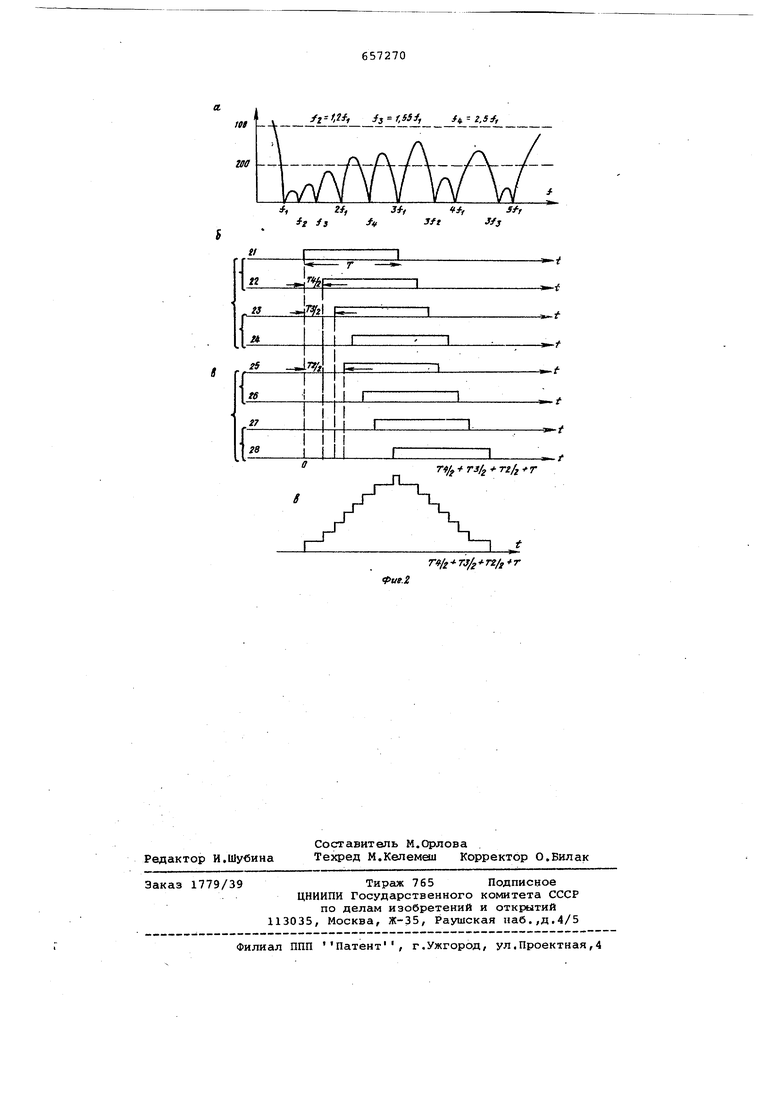
Изобретение относится к весоизмерительным устройствам, используемым преимущественно для взвешивания движущегося наземного колесного транспор та (ж.д.вагонов, автомобилей и т.п.)Известно устройство по основному авт.св. 300774, используемое преимущественно для взвешивания движущегося наземного колесного транспорта,. выполненное в виде грузоприемной плат формы, опирающейся на тензометрические силоизмерители, преобразователя аналог-код, связанного через ключевую схему с интегратором, выходного устройства и блока формирования интегралов , который имеет программирующий счетчик общего числа измерений, соединенный с триггерами управления через дешифратор вентилями, входы которых соединены с распределителем импульсов генератора переменной частоты а выходы - с ключевой схемой. Цикл од ного взвешивания в данном устройстве начинается с момента наезда колесДви жущегося транспорта на грузоприемную платформу н завершается после выполнения заданного числа отдельных измерений, т.е. продолжительность цикла жестко фиксирована, При ограниченной длине грузоприемного узла при увеличении скорости движения транспорта (а в реальных условиях такие ситуации возникают часто) до окончания цикла возвешивания переднее колесо начинает скатываться с платфорг л, что приводит к большим погрешностям. Обычно скорость движения транспорта уменьшают до заведомо безопасного значения, что снижает производительность весоизмерительного устройства и ухудшает условия поддержания равномерного движения транспорта через грузоприемную платформу без толчков и рывков. Целью изобретения является сохранение точности взвешивания при превышении допустимой скорости движения транспорта по грузоприемной платформе ограниченной длины. Это достигается тем, что предлагаемое устройство снабжено фиксатором кода веса, выполненным в виде преобразователя аналог-код следящего действия с вентилем для входных импульсов заполнения, узлом управления и анализатором превышения допустимой скорости, состоящим из логической схемы совпадения и датчиков положения колес транспорта на грузоприемной платформе. которые расположены на ее концах и присоединены через узел управления к одному из входов логической схемы, второй вход которой подключен к выходу программирующего счетчика общего числа измерений, а ее выход соединен с управляющим входом вентиля; сигнализатором превышения скорости, выполненным в- виде формирователя сигнала импульсного вида, вход которого подключен, к выходулогической схемы, а выход - к выходному регистрирующему блоку для вьщачи предупреждающих и маркирующих сигналов. Нэ фиг.1 представлена блок-схема, на фиг.2а - распределение погрешностей; на фиг,26 - длительность Т кажд то интеграла; 2в - временная диаграм ма . Устройс тво для взвешивания вагона 1 содержит грузоприемную платформу 2 тензометрические силоизмерители 3, преобразователь 4 аналог-код сле дящего действия, интегратор 5, ключе вую схему 6, программирующий счетчик 7 общего числа измерений, триггеры управления 8, дешифратор 9, вентили 10, распределитель 11, генератор 1-2 импульсов, выходной регистрирующий блок 13, схему управления 14 узел, управления 15, датчики 16,17 положения, вентиль 18 импульсов заполнения логич ;скую схему 19 и сигнализатор 2 Работа устройства происходит следующим образом. При движении вагона 1 в правом (п чертежу) направлении колеса оси, лро ходящей по грузоприемной платформе 2, которая опирается на тензометриче кие силоизмерители 3, воздействует н путевой датчик 16, расположенный в н чале грузоприемной платформы. Этот датчик через схему управления 14 успервый триггер танавливает в . управления 8, Импульсы.распределител 11 через поочередно открывающиеся, а затем закрывающиеся вентили 10, пос тупая на входы ключевой схемы 6, про изводят перенос кода из преобразователя 4 аналог-код следящего действия в интегратор 5 и подсчитываются в программирующем счетчике 7 Реализацйя мног интегрального спо соба взвешивания заключается в том, что в интегратор 5 вводятся коды 2 интегралов сигнала силоизмерителя 3 в соответствии с временной диаграммо (фиг.в), Для упрощения приведен слу чай , когда необходимо получить нулевую погрешность на четырех основ ных частотах по диапазону динамических помех. Здесь (фиг,26) длительность Т. каждого интеграла выбрана равной периоду частоты i ; сдвиг меж ду парами интегралов 21 и 22, 23 и 24, 25 и 26, 27 и 28 равен половине периода - частоты сдвиг между двумя парами интегралов 21,22 и 23, 24, а также 25,26 и 27, 28 равен половине периода -- члигимы ij частоты между группой интегралов 21,22,23,24 и 25,26,27,28 равен половине периода - частоты fzДлительность включенного состояния каждого триггера управления 8 характеризует длительность образова ия соответствующих интегралов. Для исключения наложения процессов суммирования кодов в интеграторе при одновременном включении нескольких вентилей 10 импульсы на их входы поступают от распределителя 11 со сдвигом во времени. Общая длительность процесса интегрирования постоянна, и процесс взвеишваиия оси вагона заканчивается после завершения формирования последнего интеграла 24. Среднее значение всех интегральных сумм, в котором образуются нулевые погрешности на расчетных частотах f , f„, f, f и в их окрестностях, получают путем Подключения к интегратору 5 регистрирующего (цифропечатающего) выходного блока 13 со сдвигом влево на количество разрядов, соответствующее числу разрядов программирующего счетчика 7, работающего в том же коде, что и интегратор 5. Доходя до конца платформы, колесо оси воздействует на датчик 17, который через узел управления 15 подает сигнал на один из входов логической схемы 19, Второй вход схемы 19, связанный с выходом программирующего счетчика 7 общего числа измерений, в процессе набора всех интегралов также открыт. В результате совпадения сигналов схема 19 запирает вентиль 18. импульсов заполнения генератора 12, и код преобразователя 4 следящего действия фиксируется в своем последнем значении. Следовательно, при скатывании колеса с грузоприемной платформы в интегратор на оставшихся числах измерений будет введен зафиксированный код нагруженной, а не уже разгрузившейся платфорлш. Это исключает появление больших дополнительных погрешностей взвешивания в условиях высокой скорости движения вагонов, Одновременно с запиранием вентиля 18, что указывает на факт превышения предельно допустимой скорости, подается команда с выхода логической схемы 19 на сигнализатор 20, выполненный, например, на базе заторможенного мультивибратора, который подает импульс в выходной регистрирующий блок 13 для нанесения маркера при цифропечати и команду на внешнюю сигнализаций для уменьшения скорости движения вагонов. При нормальной скорости движения программирующий счетчик 7 завершает подсчет числа измерений раньше, чем колесо достигает датчика положения 17, и логическая схема 19 не срабатывает. Формула изобретения 1, Устройство для взвешивания по авт.ев, 300774, отличающее56с я тем, что, с целью сохранения точности взвешивания при превышении допустимой скорости движения транспорта по весовой платформе ограниченной длины, оно снабжено фиксатором кода веса выполненным в виде преобразователя аналог-код следящего действия с вентилем для входных импульсов заполнения, узлом управления и анализатором превышения допустимой скорости, состоящим из логической схемы совпадения и датчиков положения колес транспорта На грузоприемной платформе, которые расположены на ее концах и присоединены через узел управления к од0ному из входов логической схемы, второй вход которой подключен к выходу программирующего счетчика общего числа измерений, а ее выход соединен с управляющим входом вентиля. 2. Устройство по П.1, отличающее с я тем, что оно снабжено сигнализатором превышения скорости, выполненным в виде формирователя сигнала импульсного вида, вход которого подключен к выходу логической схемы совпадения, а выход - к выходному регистрирующему блоку для выдачи предупреждающих и маркирующих сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1971 |
|
SU300774A1 |
| Устройство для взвешивания | 1976 |
|
SU678328A2 |
| Устройство для взвешивания | 1980 |
|
SU896422A2 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| БЕСКОНТАКТНЫЙ ПРИБОР ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ | 1966 |
|
SU188056A1 |
| Способ взвешивания быстродвижущихся объектов | 1976 |
|
SU605115A2 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для поосного взвешивания в движении железнодорожного подвижного состава | 1981 |
|
SU994926A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАГРУЗОК ВАГОННЫХ ОСЕЙ У ПРОХОДЯЩИХ ПО ЖЕЛЕЗНОЙ ДОРОГЕ ВАГОНОВ | 2009 |
|
RU2401996C1 |
| Устройство для измерения веса | 1984 |
|
SU1244496A1 |
ттттттттт
,г/, fj f,ssff .5f,
191
fiг/,j#,fj-fsf,
fz fsfif3ftJfj
ri/f -I- т 3/2 + тг/2- т
n/Z- TJ/i- TZ/j T
