СПОСОБ ВЗВЕШИВАНИЯ БЫСТРОДВИЖУЩИХСЯ
(54) ОБЪЕКТОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания | 1976 |
|
SU678328A2 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| Способ взвешивания быстродвижу-щиХСя Об'ЕКТОВ | 1979 |
|
SU851109A1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| КРАНОВЫЕ ВЕСЫ | 1971 |
|
SU301555A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1971 |
|
SU300774A1 |
| Устройство для взвешивания в условиях колебания грузов | 1977 |
|
SU765662A1 |
| Цифровой тензопреобразователь | 1985 |
|
SU1303836A1 |
| Устройство для измерения веса | 1984 |
|
SU1244496A1 |
| Интегрирующий преобразователь сигналов датчиков переменного тока в код | 1976 |
|
SU764121A1 |
Изобретение отноеится к облаети вееоизмерительной техннки и может быть использовано преимущественно для взвеп1ивания движущихся наземных транспортных средств (вагонов, автомобилей и т. п.).
По основному авт. ев. № 236052 известен способ взвешивания быстродвижущихся объектов, заключаюищйся в том, что определяют среднее значение четырех интегральных сумм одинаковой длительности, равной по величине норядка длительности одного периода колебаний вблизи первой границы частотного диапазона нодавляемых помех, смещают начальную точку ннтегрирования каждой интегральной суммы на половину периода колебаний вблизи второй границы указанного дианазона и смещают начало интегральных сумм на половину периода колебаний, лежащнх в середине частотного дианазона.
Однако такой сиособ не обеснечивает достаточиой точности.
Цель изобретения - новыщение точности и сокращение времени взвешивания при действии динамических помех в широком диапазоне частот.
Это достигается тем, что по предлагаемому способу число основных максимумов нОхТ,авления помех по их частотному диапазону, получаемых при усреднении интегралов, устанавливают больше трех, причем последующие
четвертый, пятый, илестон и так далее основные максимумы получают из блоков двух групп по четыре, восемь, шестнадцать и так далее интегралов, в которых грзнны интегралов смен;ают на половину периода частот макеимумов, а основные частоты максимумов подавления и их нечетные гармоники устаиавливают пепересекаюпи1мпся по диапазону подаваемых помех.
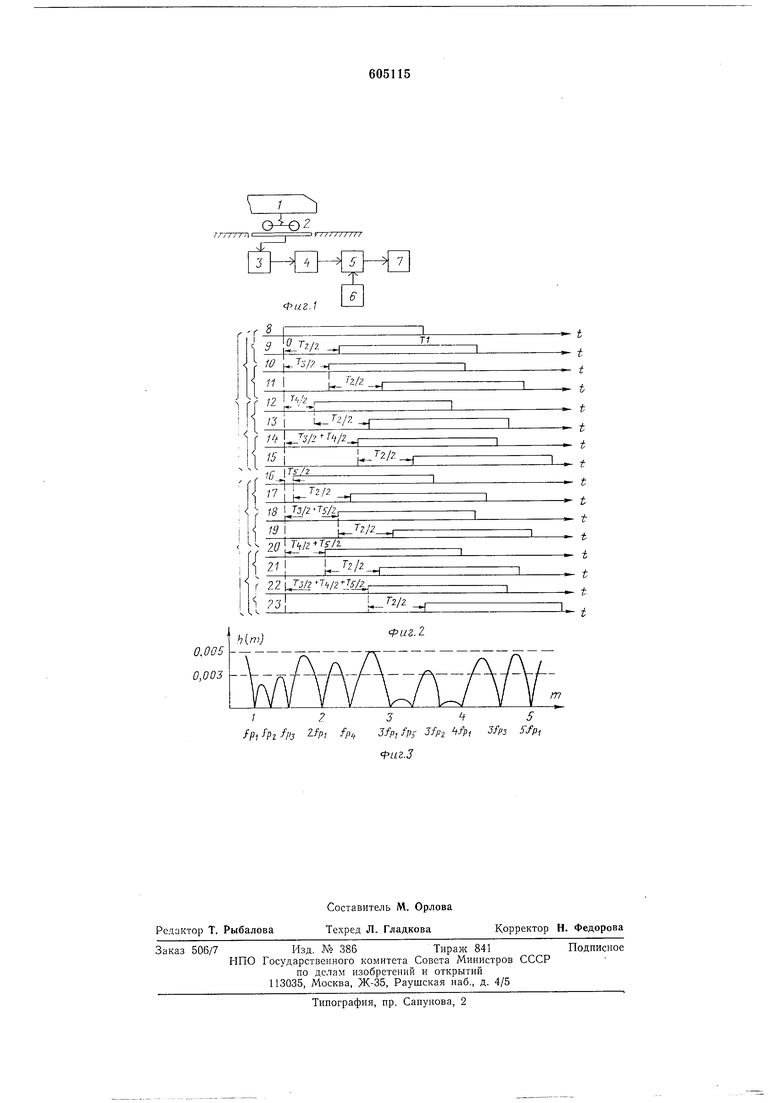
Па фиг. 1 показана структурная схема устpoiicTBa для осуи1,еств. способа; на фиг. 2 - временная дпаграмма; па фиг. 3 изображено распределение степенн подавления помех.
При прохождении BaiOHa 1 через весовую платформу 2 сигнал на выходе датчика 3 с помощью преобразователя 4 нреобразуется в цифровую форму. Значения кода из иреобразователя ностуиают в арифметическое устройство 5, которое в соответствпн с программой блока 6 управления определяет средпее значение еигнала датчика и выдает его на выходное устройство 7.
Программа блока управления строптся в соответствнн с временной диаграм ой (фнг. 2), где для конкретного нримера взят случай получения пяти () основных максимумов подавлепня помех. Здесь длнтелыюсть каждого интеграла сигнала датчика выбрана равно
одному периоду TI самой низкой частоты f р иомехп. C IЛlг между интегралами в парах 8-9, 0-II, 12-13/ 14 -15, 16-17, 18-19, 20-21 н 22-23 равен половине пернода 2/2 чаетоты f,.. Слвиг между груннами по два интеграла 8,9-10, 11; 12, 13-14, 15; 16. 17-18, 19; 20, 21-22, 23 paBeii половине пернода 7з/2 частоты /.рз- Сдвиг в блоке между группами по четыре интеграла 8, 9, 10, 11 -12, 13, 14, 15 и 16, 7, 18, 19-20, 21, 22, 23 равен ноловине пернода Г ,/2 чаетоты fp, а едвиг в блоке между по воеемь интегралов 8, 9, 10, 11, 12, 13, 14, 15-16, 17, 18, 19, 20, 21, 22, 23 - половине периода 75/2 частоты /р, помехи. Поскольку максимумы подавлепня помех образуются как на основных расчетных частотах /р,, /р,, fp3 fp,, /рз, так и на всех гармониках /р, и нечетных гармониках fp., fp,, fp, f,b то для сокращения основных частот подавления, т. е. для сокращения общего времени обработки сигнала, эти частоты располагают так, чтобы их гармоники с максимуЛгамп подавления не пересекались по диапазону помех (фиг. 3). Это позволяет увеличить скорость движения взвентиваемого вагона. Степень нодавлення гармонических помех по диапазону определяется из выражения г.т (sin г.-т) П 2 где т - OTnoHjeiine текущей частоты к нижней расчетной частоте fp, подавления помехи; а - отношение г-х верхних расчетных частот к нижней раечетной частоте нодавления помехи ( 2. 3, 4.. На фиг. 3 показана обратная величина п (т) г для конкретного примера (п 5, число иитегралов - шестнадцать, «2 1,25 а., 1,52, «4 2,4 н а5 3,3). Общее время обработки снгнала составляет -г 1 j V + 2 -2Л8Г,. Расчет показывает, что для нятикратного перекрытия частот () диапазона динамических иомех подавление номех по всему диапазону будет ие менее 200 раз. При осуществлении предлагаемого способа значительно иовыщается точность взвещивания быстродвижущихся объектов, создающих в измеряемом сигнале широкий спектр частот динамических номех, прп малой длительности обработки сигнала. Формула изобретения Способ взвещнвания быстродвижущихся объектов по авт. св. № 236052, отличающийся тем, что, с целью повыщения точности и сокращения времени взвещивания при действии динамических помех в щироком диапазоне частот, число основных максимумов нодавления помех по их частотному диапазону, получаемых при усреднении интегралов, устанавливают больше трех, причем последующие четвертый, пятый, шестой и так далее основные максимумы иолучают из блоков двух грунп по четыре, восемь, шестнадцать и так далее интегралов, в которых группы интегралов смещают на половину периода частот максимумов, а основные частоты максимумов подавления и их нечетные гармоники устанавливают непересекающимися по диапазону подавляемых помех.
123i5
fpi fpi fli 2//), fp,, 3fp, fpf 3fpi Vpt 3fpi
fliZ.J
