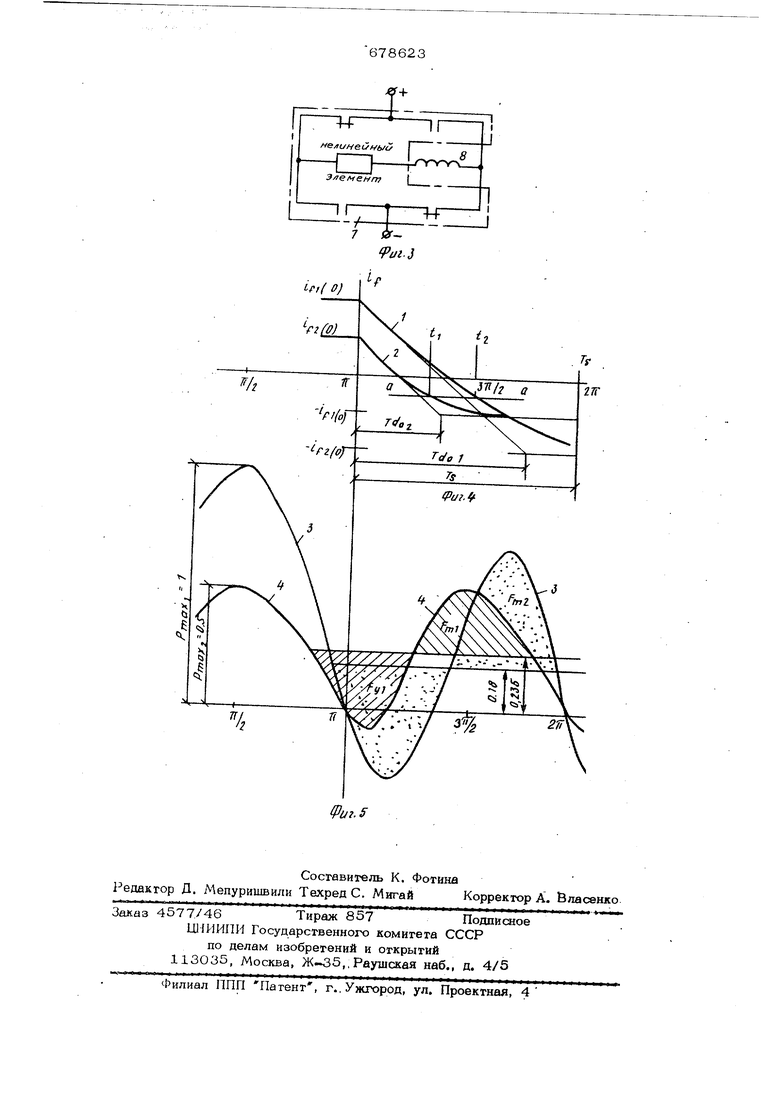
ния режимных величин в процессе переклю чения. Поставленная цель аостигается тем, что измеряют период скольжения аашйны и уменьшают постоянную времени, по крайней мере, одной обмотки возбуждения в эависимости от измеренного скольжения согласно условию где Т, - постоянная времени обмотки воз буждения; Те - период скольжения синхронной машины. На фиг. 1 изображена блок-схема уст- ройства, реализующая способ согласно изобретению на фиг. 2 приведен пример характеристики внутреннего сопротивления нелинейного элемента на фиг. 3 показана элементная схема переключающего устройства (реверсора); на фиг. 4 представлена зависимость изменения гока возбуждения для различных исходных значений при смене полярности напряжения на об.мотку возбуждения; на фиг. 5 дано изменение электромагнитной мощности при переключении полярности напряжения на обмотку возбуждения. Блок-схема (фиг. 1) содержит измеритель 1 скольжения, генератор 2 импульсов, схему 3 совпадения, сяетчик 4 импульсов, дешифратор 5, усилитель 6, переключающее устройство (реверсор) 7, обмотку возбуждения 8 синхронной машины. Схема работает следующим образом. При синхронной скорости вращения рото ра сигнала с измерителя 1 скольжения нет и через схему 3 совпадения не проходят (жгналы с генератора 2 импульсов. Схема заперта и никаких сигналов на изменение постоянной времени обмотки возбуждения нет. При выпадении генератора из синхронизма сигналы со схемы 3 совпадения поступают на счетчик 4 импульсов. Их число пропорционально периоду скольжения TC . Они преобразуются в дешифраторе 5 в выходную величину сигналов управления. пропорциональных периоду скольжения Т-. Сигналы с дешифратора 5 через усилитель 6 подаются на нелинейный элемент реверсора 7 (фиг. З). Внутреннее сопротивление нелинейного элемента, например электронного типa зависит от уровня сигнала управления, зависящего в свою очередь от величины периода (частоты) скольжения (фиг. 2 К Например, если сигнал, поступающий с дешифратора 5 и усиленные. в усилителе 6, соответсгвует периоду Tg, го значение Т ц будег равно R если период Tgg, то Схема работает указанным образом До гех пор, пока не восстановится синхронная работа синхронных машин с сетью и сигнал с измерителя 1 не станет равным нулю. Введение в момент переключения дополнительного активного сопротивления приводит к уменьшению амплитуды тока возбуждения и одновременному снижению постоянной времени цепи обмотки возбуждения, что позволит току возбуждения достигнуть своего противоположного направления с большей скоростью. На фиг, 4 представлена зависимость изменения тока возбуждения i (-t) при переключении полярности напряжения обмотки возбуждения для различных исходных значений l (о), i,. (о)отЕуд видно, что в сечении а-а одно S то же значение тока 1-(о) достигается при различных -t и ig. На фиг. 5 приведено изменение электромагнитной мощности при- переключении полярности напряжения на обмотке возбуждения для соответствующих изменений тока ipCi) на фиг. 4. Условие сохранения результирующей устойчивости при переключениях выразится как F, F . При изменении тока по кривой 1 (фиг. 4), что соответствует переключению без дополнительного активного сопротивлейия э ° пустимое значение исходной загрузки равно 0,18 PfT (фиг. 5, кривая .3). При переключении с дополнительным иу,э(фиг. 4 кривая 2) эта 3arfjy3Ka составляет 0,235 (фиг. 5, кривая 4). Введение в цепь обмотки возбуждения дополнительного сопротивления /I ff позво-, ляет не только достигнуть роста допустимой исходной вагр.узки синхронной маши;ны и обеспечения ее успешной ресинхронизации при использовании переключения, но также уменьшить амплитуду электромаг«итной мощности (и тока), что является ОДНИ из основных ограничений допустимости длительного асинхронного хода. Величина вводимого в цепь обмотки возбуждение: дополнительного сопротивдения выбирается такой, чтобы постоянвея времени цепи обмотки возбуждения была меньше или равна времени полупроворота ротора где Т, - постоянная времени цепи обмотки возбуждения; Tg период проворога ротора сшарон ной машины. При этом значение Рц должно удовлетворять соотношению: Т( где V - сопротивление обмотки возбуждения;Т, - постоянная времени собственно обмотки возбуждения. Использование предлагаемого способа аварийного управления возбуждением синхронных машин, цри смене полярности напряжения на обмотках возбуждения, повышаёт результирующую устойчивость электросистем, расширяет область его использования для большего числа синхронных машин. Это повышает надежность работы электрических систем, что в конечном сче те снижает недоотпуск электроэнергии потребителям. Уменьшение же колебания режимнь1х параметров синхронных машин при нарушении динамической устойчивости повьпиает качество электроэнергии. Формула изобретения Способ автоматического аварийного уп равления возбуждением синхронной машины, по крайней мере, с одной обмоткой возбуждения на роторе путем подачи в ава рийном режиме в обмотку возбуждения напряжения форсировки и изменения полярности напряжения, по крайней мере, одной обмотки возбуждения в моменты, когда электрический угол между вектором напряжения сети и соответствующей осью обмотки возбуждения равен kit , о т л и - чающийся тем, что, с целью расширения области использования и снижения колебаний режимных параметров, измеряют период скольжения машины и уменьшают постоянную времени, по крайней мере, одной обмотки возбуждения в зависимости от измеренного скольжения согласно условию; где Т, - постоянная времени обмотки возбуждения; Tg « период скольжения синхронной машины. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N9 439053, кл. Н 02 Р 9/1О, 1972. 2.Авторское свидетельство СССР № 434555, кл. Н 02 Р 9/10, 1972. 3.Научно-исследовательский отчет ВНИИЭ. N9 Гос. регистрации 72021803:М., 1972.
fui.l
/f/
нэ
О
rs2
si fPui-l
Tf

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВОЗБУЖДЕНИЯ СЙНХРОННбЙ МАШИНЫ | 1969 |
|
SU247383A1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1410212A2 |
| СПОСОБ ПУСКА И САМОЗАПУСКА СИНХРОННОГО ДВИГАТЕЛЯ | 1992 |
|
RU2014720C1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1372516A1 |
| Устройство для возбуждения синхронной электрической машины | 1985 |
|
SU1387152A1 |
| Управляемый вентильный электродвигатель | 1985 |
|
SU1259463A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1984 |
|
SU1314429A1 |
| СПОСОБ УМЕНЬШЕНИЯ ДЕЙСТВИЯ ПУСКОВОГО ТОКА СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ НАПРЯЖЕНИЕМ ВЫШЕ 1000 В И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2357353C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С РЕГУЛИРУЕМЫМ ЭЛЕКТРОДИНАМИЧЕСКИМ ТОРМОЖЕНИЕМ | 1993 |
|
RU2072926C1 |
| Вентильный электропривод постоянного тока | 1976 |
|
SU657561A1 |