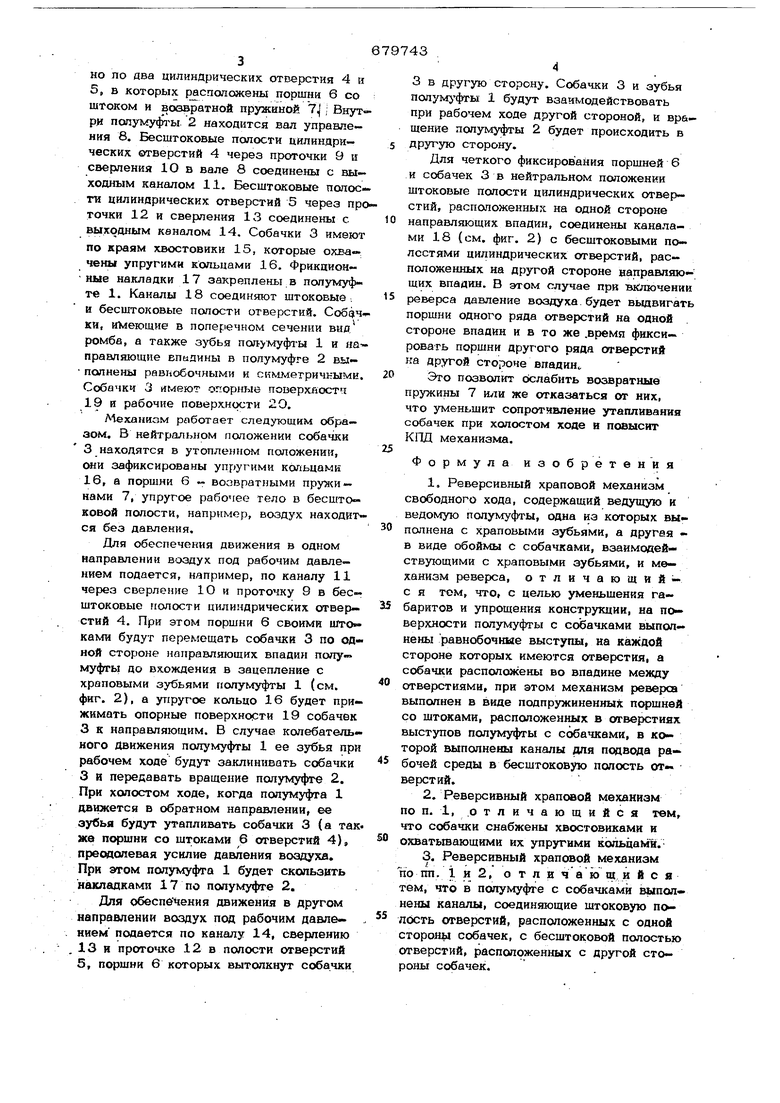
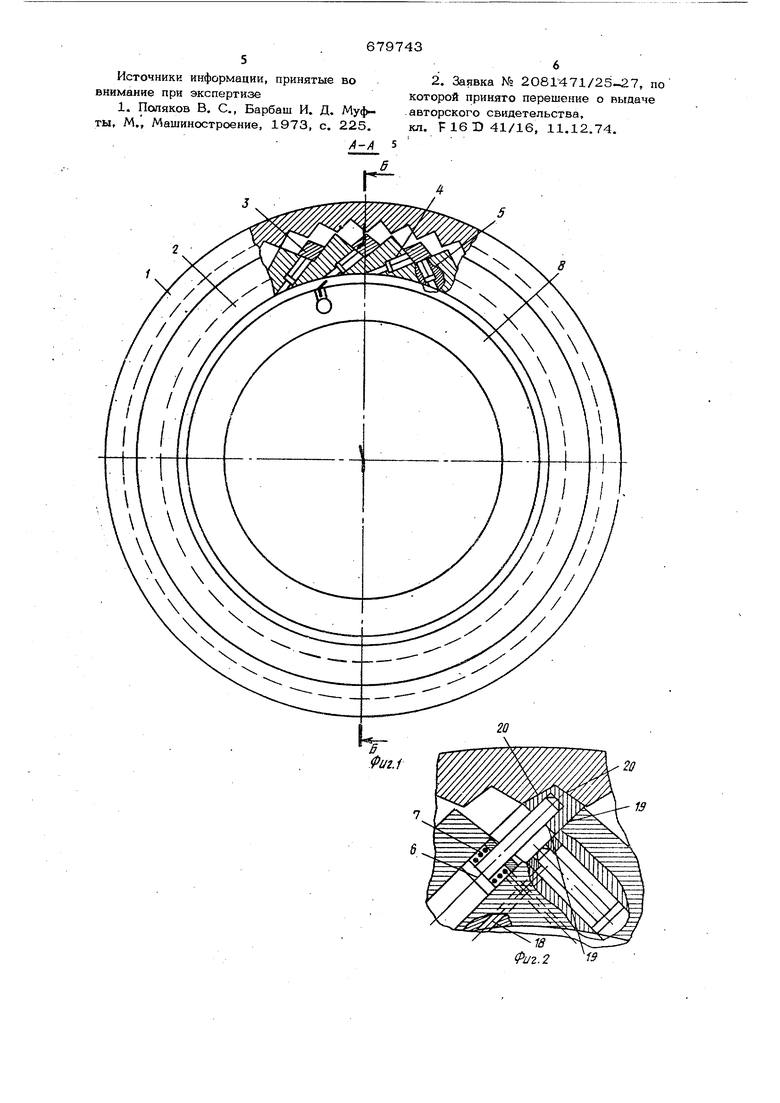
но по два цилиндрических отверстия 4 и 5, в которых расположены поршни 6 со штоком и возвратной пружиной 7 ; Внутри попумуф1 ы 2 находится вал управления 8. Бесшгоковые полости цилиндрических отверстий 4 через проточки 9 н сверления 10 в вале 8 соединены с выходным каналом 11. Бесштоковые полос ги цилиндрических отверстий 5 через про точки 12 и сверления 13 соединены с выходным каналом 14. Собачки 3 имеют по краям хвостовики 15, которые охвачены упругими кольцами 16. Фрикционныв накладки 17 закреплены в полумуф те 1. Каналы 18 соединяют штоковые . и бесштоковые полости отверстий. ки, иК1еющие в поперечном сечении вид ромба, а также зубья пога муфты 1 и яа- правляющие БПИДИНЫ в попумуфге 2 выполнены равнобочными и симметричными. Собачкч 3 имеют опорные поверхйостч 19 и рабочие поверхнс сти 2О. Л еханиам работает следующим образом. В нейтральном положении собашси 3 находятся в утопленном положении, они зафиксированы упругими кольцами 16, а поршни 6 - воавратными пруя«и - нами 7, упругое рабочее тело в бесшто- ковой полости, например, воздух находит ся без давления. Для обеспечения движения в одном направлении воздух под рабочим давлением подается, например, по каналу 11 через сверление 10 и проточку 9 в бес- штоковые полости цилиндрических отверстий 4. При этом поршни 6 своими ШТО ками будут перемещать собачки 3 по одной стороне направляющих впадин полу- муфты до вхождения в зацепление с храповыми зубьями полумуфты 1 (см. фиг. 2), а упругое кольцо 16 будет при жимать опорные поверхности 19 собачек 3 к направляющим. В случае колебательного Движения полумуфты 1 ее зубья при рабочем ходе будут заклинивать собачки 3 и передавать вращение полумуфте 2. При холостом ходе, когда пояумуфта 1 движется в обратном направлении, ее зубья будут утапливать собачки 3 (а так же поршни со штоками 6 отверстий 4), преодолевая усилие давления воздуха. При этом полумуфта 1 будет скользить накладками 17 по полумуфте 2. Для обеспечения движения в другом направлении воздух под рабочим давлекием подается по каналу 14, сверлению . 13 и проточке 12 в полости отверстий 5, поршни 6 которых вытолкнут соба.чки 3 в другую сторону. Собачки 3 и зубья полум фты 1 будут взаимодействовать при рабочем ходе другой стороной, и вращение полумуфты 2 будет происходить в другую сторону. Для четкого фиксирования поршней 6 и собачек 3 в нейтральном положении штоковые полости цилиндрических отверстий, распапоженных на одной стороне направляющих впадин, соединены каналами 18 (см. фиг. 2) с бесштоковыми полсстями цилиндрических отверстий, расположенных на другой стороне направляющих впадин. В этом случае прв включении реверса давление воздуха будет выдвигать поршни одного ряда отверстий на одной стороне впадин и в то же .время фиксировать поршни другого ряда отверстий на другой стороне впадин. Это позволит ослабить возвратные пружины 7 и/ти же отказаться от них, что уменьшит сопротивление утапливания собачек при холостом ходе и повысит КПД механизма. Формула изобретения 1.Реверсивный храповой механизм свободного хода, содержащий ведущую к ведомую полумуфты, одна из которых выполнена с храповыми зубьями, а другая в виде обоймы с собачками, взаимодействующими с храповыми зубьями, и механизм реверса, отличающий - с я тем, что, с целью уменьшения габаритов и упрощения конструкции, на поверхности полумуфты с сс ачками выполнены равнобочные выступы, на каждой стороне которых имеются отверстия, а собачки расположены во впадине между отверстиями, при этом механизм реверса выполнен в виде подпружиненных поршней со штоками, расположенных в отверстиях выступов полумуфты с собачками, в которой выполнены каналы для подвода рабочей среды в бесштоковую полость отверстий. 2.Реверсивный храповой механизм по п. 1, .отличающийся тем, что собачки снабжены хвостовиками и охватьгаающими их упругими кольцаМй. 3.Реверсивный храповой механизм по пп. 1и2, отличаю щи и с я тем, что в полумуфте с собачками выполнены каналы, соединяющие штоковую полость отверстий, расположенных с одной сторощл собачек, с бесштоковой полостью отверстий, расположенных с другой стороны собачек.
Источникк информации, принятые во2. Заявка № 2081471/25-27, по
внимание при экспертизекоторой принято перешение о выдаче
1. Поляков В. С,, Барбаш И. Д. .авторского свидетельства,
ты, М., Машиностроение, 1973, с. 225.кл. F 16 D 41/16, 11.12.74.
/1-А 5 ff
б ,а
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный храповый механизм свободного хода | 1977 |
|
SU620710A1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2013 |
|
RU2548870C2 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444429C1 |
| Реверсивный храповой механизм | 1985 |
|
SU1499016A1 |
| РЕДУКТОР ХРАПОВОЙ РЕВЕРСИВНЫЙ | 2003 |
|
RU2253780C1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444430C1 |
| Храповой механизм свободного хода | 1987 |
|
SU1603094A1 |
| Лебедка | 1980 |
|
SU931690A1 |
| Храповой механизм привода поворота | 1983 |
|
SU1157309A1 |
АП fJ Фиг.Ь . . Фи2Л
