Изобретение относится к машиностроению, в частности к редукторостроению, и может быть использовано в приводах рабочих органов машин и механизмов, где требуется изменение числа оборотов ведомого вала и его реверсирования.
Известны храповые механизмы для передачи прерывистого, а также непрерывного вращения ведомому валу в одном или двух направлениях, содержащие храповые колеса, взаимодействующие с ними собачки и передающие рычаги.
Однако эти механизмы в одних случаях имеют дискретное (неравномерное) движение рабочего органа, либо в других случаях, не имеют реверсирования, т.е. осуществляют вращение ведомого вала в одном направлении и имеют свободный ход в сторону вращения ведомого вала, что в некоторых случаях является недостатком.
Известен, например, реверсивный храповой механизм, содержащий два установленных последовательно на одной оси храповых колеса с противоположно направленными зубьями, взаимодействующих с двумя попеременно поднимающимися над зубьями собачками, ось которых закреплена на конце рычага, другим концом связанного с рукояткой управления (см. а.с. СССР №489893, МКИ F 16 D 41/16).
Однако данный механизм не обеспечивает плавного непрерывного вращения ведомого вала и является конструктивно сложным.
Известен кулачково-храповой механизм для передачи вращательного движения от ведущего вала к ведомому, включающий корпус с крышкой, в полости которого расположены два жестко закрепленных на ведущем валу кулачка, сдвоенное храповое колесо и два качающихся рычага с подпружиненными собачками, смонтированными на ведомом валу. Данное решение обеспечивает непрерывное и равномерное вращение ведомого вала (см. патент РФ №1808058, МПК F 16 H 29/02).
Однако данный механизм не является реверсивным.
Наиболее близким по технической сущности к предлагаемому изобретению является реверсивный привод, содержащий ведущий вал со смонтированными на нем с угловыми смещениями кулачками, с размещенными на них собачками, взаимодействующими с зубьями храпового колеса и передающими движение ведомому валу. Управление собачками при реверсировании вращения ведущего вала осуществляется регулируемым упором, выполненным эксцентричным (см. патент РФ №2064620, МПК F 16 Н 29/10).
Однако данный реверсивный привод имеет ограниченное применение и может быть использован только в грузоподъемных машинах, поскольку при реверсировании ведущего вала поворот ведомого вала осуществляется под действием силы тяжести (массы) груза, закрепленного на ведомом валу. Кроме того, у данного механизма ведомый вал движется неравномерно с ударами, ввиду чего необходимо устанавливать три и более собачки, что усложняет конструкцию.
Задачей изобретения является обеспечение плавного и непрерывного вращения ведомого вала, возможности его реверсирования, повышение надежности и нагрузочной способности механизма, устранение свободного хода ведомого вала.
Поставленная задача решается за счет того, что в редуктор храповой реверсивный, содержащий корпус, в котором размещены ведущий вал с двумя жестко закрепленными на нем с угловыми смещениями кулачками, две подпружиненные собачки, взаимодействующие с зубьями храповых колес и передающие движение ведомому валу, блок реверса с поворотным устройством переключения собачек, силовой блок, согласно предлагаемому решению, введены два качающихся рычага, свободно сидящие на ведомом валу и образующие кинематическую цепь с ведущим валом, на оси которых с одной стороны закреплены собачки, а с противоположной - ролики, зубья храповых колес выполнены в виде объемных геометрических фигур с прямоугольными рабочими поверхностями и трапециевидными торцевыми, имеющими сопряжение с окружностями впадин храповых колес меньшим основанием трапеции, каждая собачка выполнена с двумя рабочими поверхностями с противоположных сторон, соответствующими геометрической форме рабочих поверхностей зубьев храповых колес, причем блок реверса содержит передающее кинематическое звено от ведущего вала к ведомому.
Кулачки выполнены профилированными, имеющими по периметру две рабочие поверхности в виде кривых с равномерным подъемом для плавного поворота ведомого вала при прямом и обратном ходе с заданным передаточным отношением.
Блок реверса может быть выполнен механическим или электромеханическим.
Редуктор содержит механический тормоз, размещенный на ведомом валу.
Изобретение поясняется чертежами.
На фиг.1 схематически изображен реверсивный храповой редуктор, вид сбоку, на фиг.2 - вид сверху, на фиг.3 - профиль кулачка, на фиг.4 - форма зуба храпового колеса.
Где:
1 - ведущий вал,
2 - ведомый вал,
3 - корпус,
4, 5 - кулачки,
4, 5 - кулачки,
6, 7 - храповые колеса,
8, 9 - качающиеся рычаги,
10, 11 - оси собачек,
12, 13 - собачки,
14, 15 - ролики,
16 - силовой блок,
17 - передающее кинематическое звено,
18 - поворотное устройство,
19 - механический тормоз,
20, 21 - подпружиненные упоры.
Редуктор храповой реверсивный для передачи вращательного движения от ведущего вала 1 к ведомому валу 2 состоит из корпуса 3, двух жестко закрепленных на ведущем валу 1 кулачков 4 и 5, профили которых смещены друг относительно друга на 180°, двух храповых колес 6 и 7, смонтированных на ведомом валу 2, и двух качающихся рычагов 8 и 9, свободно сидящих на ведомом валу 2, на которых с одной стороны закреплены оси 10 и 11, шарнирно установленных на них собачек 12 и 13 и с противоположной стороны роликов 14 и 15, силового блока 16, осуществляющего передачу усилия на собачки 12 и 13 через рычаги 8 и 9 в случае реверса механизма, и блока реверса, включающего передающее кинематическое звено 17 от ведущего вала 1 к ведомому валу 2 и поворотное устройство 18 переключения собачек 12 и 13, механического тормоза 19, синхронно работающего с храповой передачей. В рабочем положении собачки 12, 13 удерживаются подпружиненными упорами 20, 21, установленными в рычагах 8 и 9.
Редуктор работает следующим образом.
При вращении ведущего вала 1 кулачки 4 и 5 за счет относительного разворота посредством рычагов 8 и 9 обеспечивают возвратно-поступательное движение собачек 12 и 13. Собачки 12 и 13 поочередно входят в зацепление с зубьями храповых колес 6 и 7, обеспечивая поворот ведомого вала 2, жестко связанного с храповыми колесами 6 и 7. Степень постоянства угловой скорости ведомого вала 2 обеспечивается плавно поднимающимися рабочими кривыми профилей кулачков 4 и 5. Таким образом осуществляется прямой ход.
При реверсе двигателя блок реверса, включающий передающее кинематическое звено 17 и поворотное устройство 18, переключает собачки 12 и 13 в противоположное крайнее положение по отношению к зубьям храповых колес 6 и 7. Таким образом осуществляется обратный ход.
В каждом из крайних рабочих положений собачки 12 и 13 удерживаются подпружиненными упорами 20 и 21, а передача усилия в случае обратного хода осуществляется посредством силового блока 16.
Для предотвращения свободного хода ведомого вала 2 на последнем установлен механический тормоз 19, синхронно работающий с храповой передачей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулачково-храповой механизм | 1991 |
|
SU1808058A3 |
| Храповой механизм | 1986 |
|
SU1404713A1 |
| Транспортное средство | 1977 |
|
SU671173A1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Предохранительная муфта | 1982 |
|
SU1211493A1 |
| Дискретная реверсивная передача | 1981 |
|
SU1044872A1 |
| Автоматический привод | 1990 |
|
SU1772493A1 |
| РЕВЕРСИВНАЯ МУФТА СВОБОДНОГО ХОДА | 1990 |
|
SU1802586A1 |
| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| Храповой механизм | 1983 |
|
SU1099152A1 |


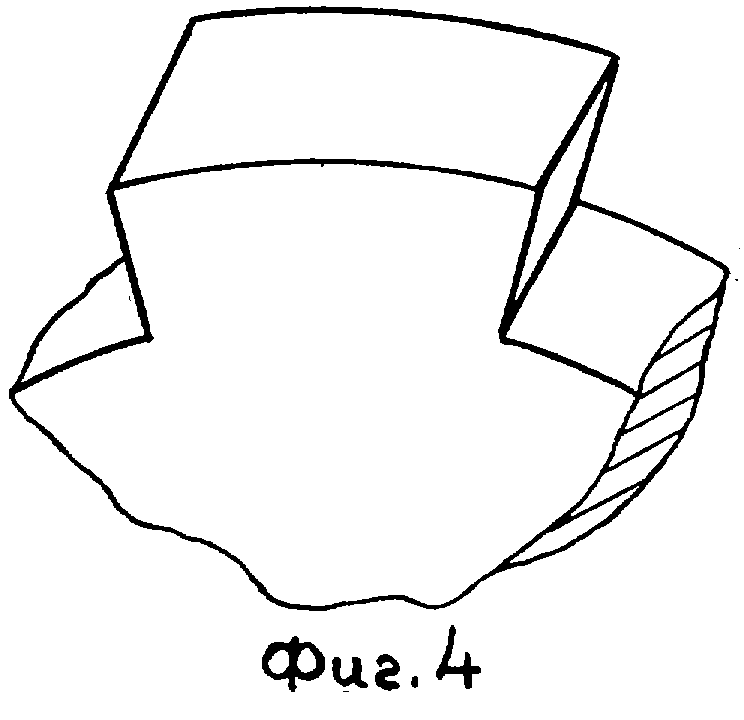
Изобретение относится к области машиностроения, в частности к редукторостроению, и может быть использовано в приводах рабочих органов машин и механизмов, где требуется изменение числа оборотов ведомого вала и его реверсирования. Редуктор храповой реверсивный содержит корпус, в котором размещены ведущий вал с двумя кулачками, ведомый вал с двумя храповыми колесами, два качающихся рычага, свободно сидящие на ведомом валу и образующие кинематическую цепь с ведущим валом, блок реверса с поворотным устройством переключения собачек и передающим кинематическим звеном от ведущего вала к ведомому валу, и силовой блок. На качающихся рычагах размещены ролики и собачки, взаимодействующие с зубьями храповых колес. Зубья храповых колес выполнены в виде объемных геометрических фигур с прямоугольными рабочими поверхностями и трапециевидными торцевыми, имеющими сопряжение с окружностями впадин храповых колес меньшим основанием трапеции. Собачки выполнены с двумя рабочими поверхностями с противоположных сторон, соответствующими геометрической форме рабочих поверхностей зубьев храповых колес. Технический результат заключается в обеспечении плавного и непрерывного вращения ведомого вала, возможности его реверсирования, повышении надежности и нагрузочной способности механизма, устранении свободного хода ведомого вала. 4 з.п. ф-лы, 4 ил.

| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| Храповой механизм | 1973 |
|
SU549631A1 |
| JP 50089755, 18.07.1975 | |||
| JP 57061858, 14.04.1982 | |||
| US 3668942, 13.06.1972. | |||

