Изобретение относится к машиностроению и м.ожет применяться в импульсных вариаторах и других передачах,
Цель изобретения - повышение на- грузочной способности за счет увеличения жесткости собачек и повышение быстродействия механизма.
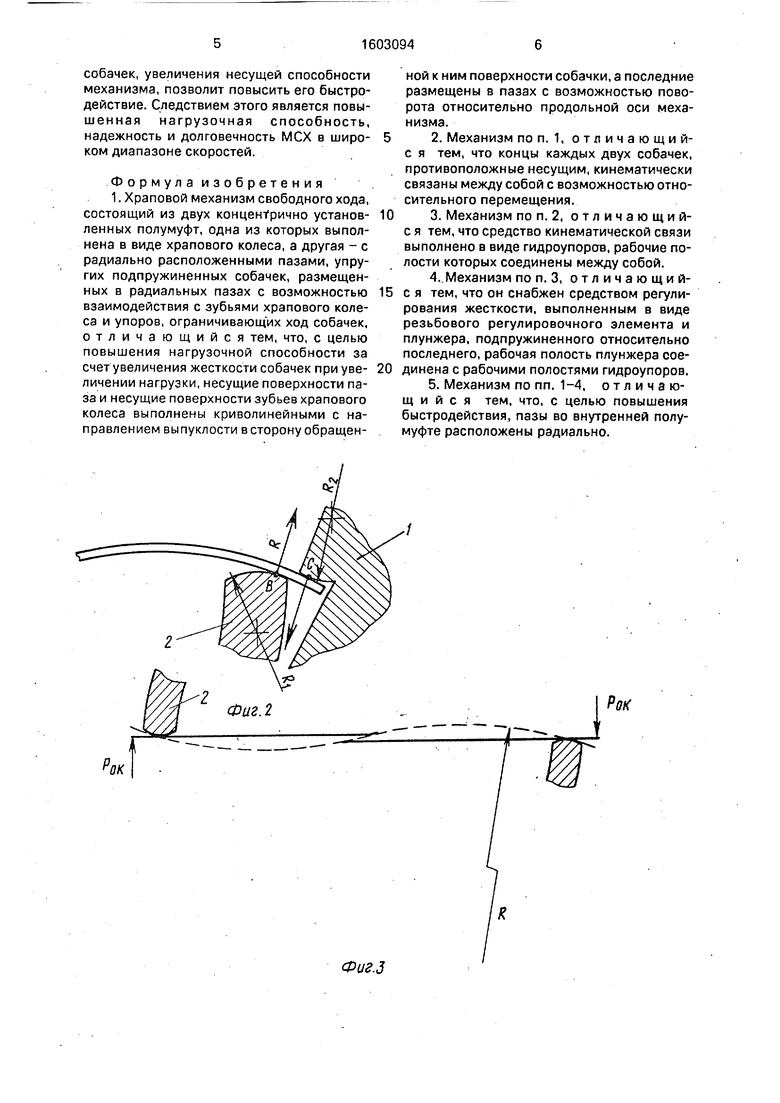
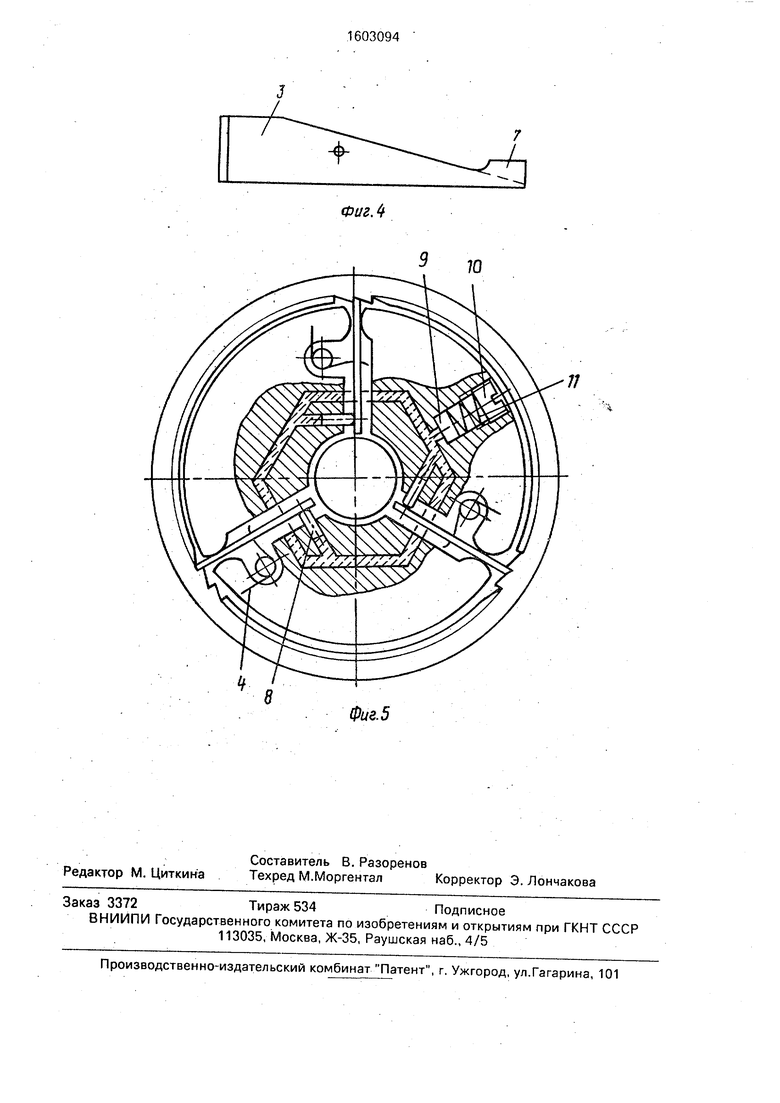
На фиг. 1 изображен предлагаемый храповой механизм свободного хода (МСХ); на фиг. 2 - кинематическая схема взаимодей- ствия.собачек с несущей поверхностью паза и зуба храпового колеса; на фиг. 3 - кинематическая схема взаимодействия собачек; на фиг. 4-собачка, общий вид; на фиг. 5- МСХ с гидроупорами.
Предлагаемый храповой МСХ содержит: полумуфту 1 с храповым колесом, полумуфту 2 с собачками 3, пружины 4, упоры 5, ограничивающие ход собачек при совершении свободного хода, упоры 6, являющиеся несущими поверхностями паза, гидроупоры 8, плунжер 9.
На фиг. 1 изображен МСХ, содержащий одну пару собачек с механической кинематической связью. Пружины 4 прижимают концы собачек 7 друг к другу и каждую собачку к храповому колесу. Упор 5 служит для .ограниче ния движения собачек и ограничения поворота собачек вокруг продольной оси ВО время свободного хода.
На фиг. 5 изображен МСХс тремя собачками, уравнение нагрузки на которые производится с помощью гидроупоров 8. Плунжер 9 относительно регулировочного элемента 10 подпружинен пружиной 11, что позволяет изменять упругие свойства МСХ. Пружины 4 прижимают собачки к гидроупорам 8 и к храповому колесу.
Механизм работает следующим образом.
При вращении полумуфты 2 с собачками против часовой стрелки собачки взаимодействуют с храповым колесом, которое поворачивает их вокруг упоров 6 до тех пор, пока силы, действующие на собачки, не уравновесятся (фиг. 3). При дальнейшем нагруже- нии МСХ увеличивается прогиб собачек, а линии контакта В и С стремятся навстречу друг другу (фиг. 2). При передаче максимальной нагрузки собачки работают как шпонки. При вращении полумуфты с собачками по часовой стрелке совершается свободный ход МСХ.
Работа МСХ с гидроупорами производится следующим образом.
При вращении полумуфты 2 с собачками против часовой стрелки собачки взаимодействуют с храповым колесом, которое поворачивает их вокруг упоров 6. Собачки своим концом 7 упираются в гидроупоры В, перемещая последние. Перемещение гидроупоров 8 с собачками совершается до тех пор, пока все собачки не вступят во взаимодействие с храповым колесом с одинаковой силой. Одни гидроупоры утапливаются (гидроупоры, на которые давят собачки, вошедшие в зацепление с храповым колесом), другие гидроупоры выдвигаются, перемещая собачки навстречу зубьям храпового
0 колеса.
После зацепления всех .собачек с храповым колесом давление в рабочих полостях растет, перемещая плунжер 9, который воздействует на регулируемую пружину 11.
5 Жесткость МСХ можно изменять, затягивая пружину элемента 10.
При вращении полумуфты с собачками по часовой стрелке совершается свободный ход МСХ.
0 Несущие поверхности паза Ri и собачек R, а также собачки R и несущей поверхности зуба храпового колеса R2 выполнены криволинейными с направлением выпуклости в сторону обращенной к ним поверхности со5 бачки.
Относительная кривизна сопрягаемых поверхностей собачки и паза, собачки и храпового колеса выбирается из следующей зависимости;
0 „.„.„.(.
РОК -
5
0
М
2R
где РОК - сила, действующая в сечении С на собачку;
Е - модуль упругости;
В - ширина собачки;
RI - радиус кривизны собачки;
R2 - радиус кривизны упора (зуба);
М - момент на муфте:
R - радиус несущей поверхности МСХ, или
0 2R ВRI -f-R2
0,418 М Е RI R2
Пар кинематически связанных собачек
можетбыть несколько, напримертри, в МСХ с гидроупорами количество собачек ограничивается конструктивными признаками. Быстродействие механизма зависит от
массы собачек и силы, с которой собачки прижимаются к храповому колесу. На малых скоростях и в статике прижим собачки обеспечивается пружиной 4, при увеличении скорости центробежные силы увеличивают
прижим собачек к храповому колесу, тем самым повышая быстродействие МСХ. Для этой же цели служит упор 5.
Данная конструкция храпового МСХ позволит добиться равномерного нагружения
собачек, увеличения несущей способности механизма, позволит повысить его быстродействие. Следствием этого является повышенная нагрузочная способность, надежность и долговечность МСХ в широком диапазоне скоростей.
Форму л а и 3 о бретени я 1. Храповой механизм свободного хода, состоящий из двух кoнцeнtpичнo установленных полумуфт, одна из которых выполнена в виде храпового колеса, а другая - с радиально расположенными пазами, упругих подпружиненных собачек, размещенных в радиальных пазах с возможностью взаимодействия с зубьями храпового колеса и упоров, ограничивающих ход собачек, отличающийся тем, что, с целью повышения нагрузочной способности за счет увеличения жесткости собачек при увеличении нагрузки, несущие поверхности паза и несущие поверхности зубьев храпового колеса выполнены криволинейными с направлением выпуклости в сторону обращенной к ним поверхности собачки, а последние размещены в пазах с возможностью поворота относительно продольной оси механизма.
52. Механизм по п. 1, отличающийс я тем, что концы каждых двух собачек, противоположные несущим, кинематически связаны между собой с возможностью относительного перемещения.
0 3. Механизм по п. 2, отличающий- с я тем, что средство кинематической связи выполнено в виде гидроупорогв, рабочие полости которых соединены между собой. 4.. Механизм по п. 3, отличающий5 с я тем, что он снабжен средством регулирования жесткости, выполненным в виде резьбового регулировочного элемента и плунжера, подпружиненного относительно последнего, рабочая полость плунжера сое0 динена с рабочими полостями гидроупоров. 5. Механизм по пп. 1-4. отличающийся тем. что, с целью повышения быстродействия, пазы во внутренней полумуфте расположены радиально.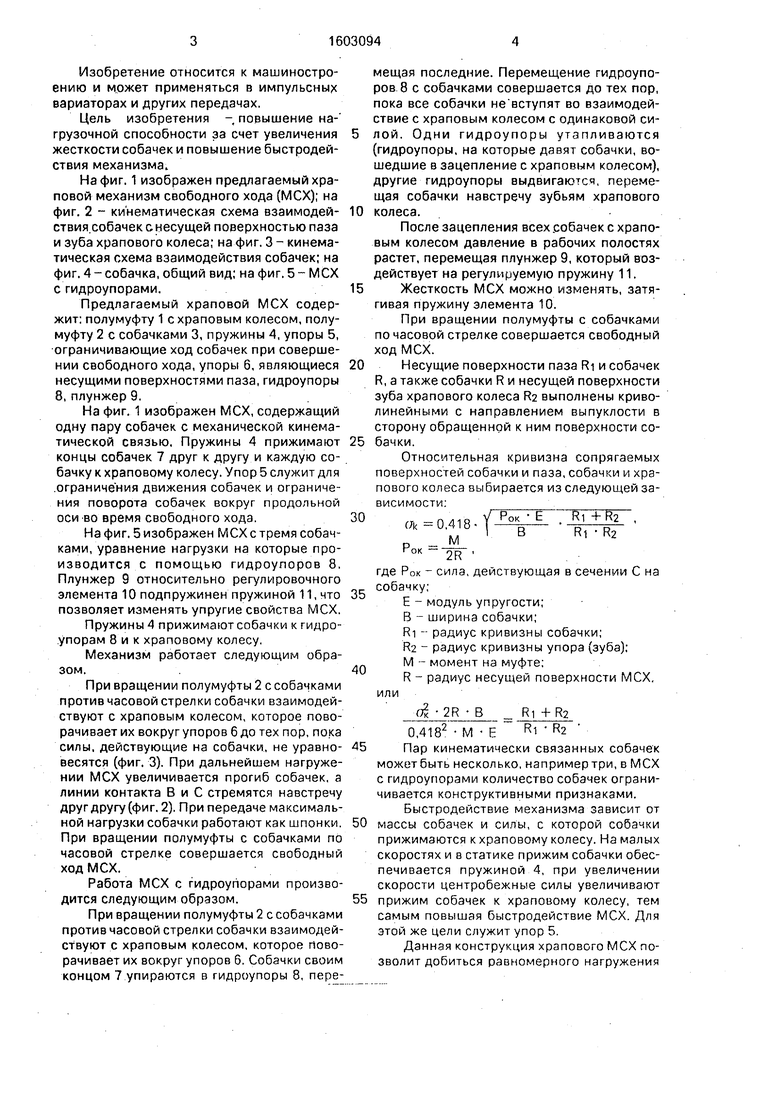
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU432310A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |
| ЛЕБЕДКА | 1986 |
|
RU1471469C |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| ХРАПОВАЯ ВЕЛОСИПЕДНАЯ МУФТА С АМОРТИЗАЦИЕЙ УДАРОВ ВРАЩАТЕЛЬНОГО МОМЕНТА | 2010 |
|
RU2431066C1 |
| Основный регулятор ткацкого станка | 1983 |
|
SU1152984A1 |
| Предохранительная муфта | 1982 |
|
SU1211493A1 |
| Храповая муфта | 1973 |
|
SU475475A1 |
Изобретение относится к машиностроению и может применяться в импульсных вариаторах и других передачах. Цель изобретения - повышение нагрузочной способности за счет увеличения жесткости собачек и повышение быстродействия механизма. Механизм содержит полумуфту /П/ с храповым колесом 1, П 2, в пазах с упорами 6 которой размещены собачки /С/ 3, подпружиненные к храповому колесу П 1 с помощью пружин 4. Ход С 3 ограничен упорами 5, которые также ограничивают поворот С 3 вокруг продольной оси П 1 и 2. Несущие поверхности паза и С 3, а также С 3 и несущей поверхности зуба храпового колеса выполнены криволинейными с направлением выпуклости в сторону обращенной к ним поверхности собачки. При взаимодействии С 3 с зубьями храпового колеса П 1 концы собачек, противоположные несущим, будут взаимодействовать между собой. С 3 прогнутся до тех пор, пока не уравновесятся, что обеспечит равномерное распределение нагрузки. Жесткость С 3 увеличится, и они будут работать как шпонки. Это повысит нагрузочную способность механизма. Выполнение пазов в П 2 радиально повышает быстродействие механизма. Кинематическая связь концов С 3, противоположных несущим, может быть выполнена в виде гидроупоров, рабочие полости которых связаны между собой. Регулирование жесткости С 3 в данном случае осуществляется за счет установки плунжера с упругим элементом, причем рабочая полость плунжера соединена с рабочими полостями гидроупоров, а плунжер взаимодействует с упругим элементом. 4 з.п.ф-лы, 5 ил.
ОК
Фиг.З
I
РОК
Фиг А
Фиг. 5
| Храповой механизм свободного хода | 1984 |
|
SU1214955A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
