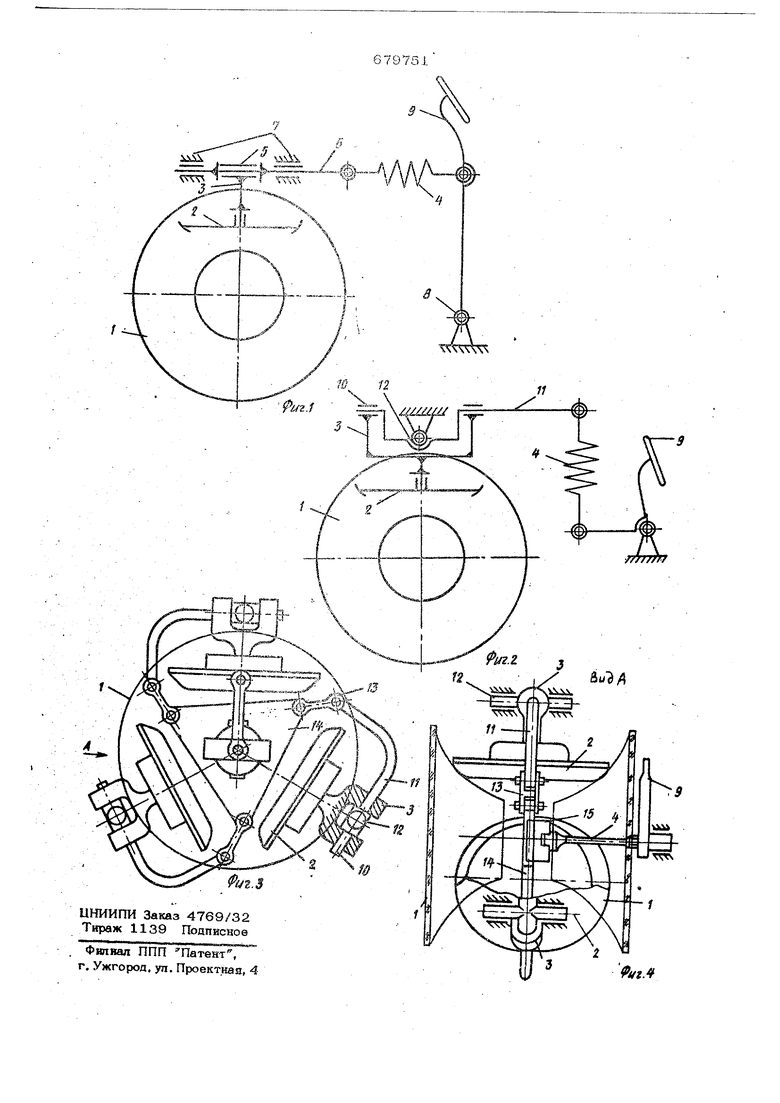
вать процессы, происходящие в трансмис сии, и, как следствие, к неоправданному и неправильному воздействию на органы управления. Цель изобретения - расширение диапа зона режимов работы вариатора. Это достигается тем, что упругий элемент другим концом кинематически связан с механизмом регул1Гровання положения роликов. На фиг. 1 изображена схема предлагаемого вариатора, в котором для отклонений по нормали из плоскости с общей осью шкивов, ось главного вращения ро лика перемешается поступательно; на фиг, 2 - схема вариатора, в котором отклонение оси ролика осушествляется ру тем ее Поворота; на фиг. 3 - конструк. тивная схема трехроликового саморегули рующегося торового вариатора с уравнительным механизмом н об.щим упругим на фиг. 4 - вид А на фиг. 3. Саморегулирующийся торовый вариа- тор включает два соосио распопоясенных торсвых шкива 1) каташвеся по ним промежуточные фрикаи жные ролики 2, оси 3 главного вращения установлены в корпусе или рамке с двумя степенями подвижности во взвимнснлерйендикуляр ных направленивх, прячем в направленвв отклонений из плоскости с общей осыо шкивов. 1 ось 3 кянематвчески связана с одним концюь упругого элемента 4. Ось 3 главво Го вращенвя ролика 2 входит во вращательную пару 5 с травер сой 6, которая образует с кс пусом по ступательные пары 7 (на фиг. 1), Таким образ1 л, для изменения передаточного отношения в плоскости с обшеЁ осью ШЕИ все ось 3 может поворачиваться дтносвтельио траверсы 6 и вместе с ней перемещаться по нормали к дтой плоскости. Траверса 6 шернирно соединена с одним упругого элемента 4, который другим концдм присоединен к качающейся в шарнире 8 падалв 9 управления вариа- i тором. Ось 3 главного вращения 2 :. образует шарнир с поперечной осью 10 дополнительного двухшарнирно о звена 1. в его продольна } ось 12i образует шйр- нвр с рамкой или корпусом, причем вза- имно перпендикулярные оси двухшарнирного звена И могут быть расположены в разных плоскостях для снижения усили управления и уменьшения габарита рам- кн (на фиг. 2). Таким образом, для изменения передаточного отношення в плос- кости с общей осью шкивов 1 ось 3 может поворачиваться относительно двухшарнирного звена 11 и вместе с последним, покачиваясь относительно продольной оси 12,перемещаться по нормали к указанной плоскости. Со звеном 11 одним концом шарнирно соединен один конец упругого элемента, например, цилиндрической пружины 4, другой конец которой связан с педалью 9 управления вариатором. В трехроликовом вариаторе (на фиг. 3 и 4) ролики 2 установлены так же, как и на фиг. 2, но их оси 3 главного вращения связаны уравнительным механизмом, включающим подводки 13 и базис™ ное звено 14. К последнему крестовокулйеной муфтой 15 присоединен один конец упругого элемента 4, например торсиона, другой конец которого присоединен к педали 9 управления вариаторе. Вариатор работает следующим обраПри определенной загрузке на каждый ролик 2 действуют в пятнах егр ксжтак- тов со шкивами 1 касательные силы,и величина кото|:шх пропорциональна круттцим моментам на шкивах .1. Равнодействующая касательных сил приложена к оси 3 главного вращения ррЯиков 2 и бпаго даря ее подвижности в направлении дей- . ствия касательных сил передается на упругий элемент 4. Заданное положением педали 9 усилие деформации упругого элемента 4 уравновешивает равнодействующую касательных сил, и таким образом, ось 3 находится а своем номинальном положении - в плоскости с общей осью 1. Если загрузка вариаторов возрастает, то увеличится и действие касательных сил на ось 3, упругий элемент 4 при этом дополнительно дефсфмируется, а ось 3 отклонится от номинального положения - из плоскости с общей осью шкивов 1, что вызовет самойеревод-роликов в сторону увеличения передаточного отношения вариатора. Самоперевод пр ежЗРТОЧ1ШХ роликов 2 будет происходить до тех пор, пока усилие на оси 3 не снизится до прежнего значения и она под действием упругого элемента 4 не воз- вратится в номинальное положение - в плоскость с общей осью шкивов 1 - при новом установившемся передаточном от- . ношении. Если загрузка вариатора упадет, то уменьшится и действие касательных сил на ось 3, которая под действием упруго го элемента 4 отклонится от номинального положения - из плоскости с обшей осью mitHBOB 1, что вызовет самопере- вод роликов 2 в сторону уменьшения передаточного отношения вариатора. Са- моперевод роликов 2 будет происходить до тех пор, пока усилие на оси 3 не увеличится до прежнего значения и она возвратится в номинальное положение - в плоскость с общей осью шкивов 1 « при аавам установившемся передйточном отношении. Аналогично происходит саморегулирование торового вариатора если водитель увеличит или уменьшит деформацию упру гого элемента .4 путем изменения положения педали 9. Оси 3 главного вращения роликов 2 вернутся в номстальное поло жение - в плоскость с обшей осью швивов 1, когда соответственное уменьшение или увв личение передаточного отнсяпення вариатора приведет к восстансжленшо равнове- сия между действием касательных сил и новык усилием деформации упругого элемента 4. При торможении двигателем или при реверсировании, в с обратным нап равлением действия касательных сш1 в пятнах контактов ролика 2 со шкивами 1 изменяется также направление действия равнодействующей касательных сил на упругий элемент 4, Для обеспечения воэ IMOIKHOCT0 саморегулирования и управления вариатором в этих условиях может быть испопьаован упругий элемент 4 двустороннего действ.ия, например Tdp- СИОН ( фиг. 3 и 4), пластинчатая пружина, система из предварительно сдеформи рованны,х цилиндрических пружин и т. п. Самоустановка роликов 2 на одинаковых радиусах качения по поверхности шкивов 1 относительно их общей оси обеспечивается уравнительным механизмом, равномерно распределяющим для каждого из роликов действие упругого элемента 4 и отслеживающего благодаря этому равенство касательных усилий в пятнах контакта роликов 2 t каждым шкивом 1. Таким образом, во всем диапазоне изменения передаточного отношения при любой наперед заданной органом управления предварительной деформации упругого элемента 4 отслеживается соответствующая этому усилию деформации сумма касательных сил на осях главного вращения 3 промежуточных роликов 2 вариатора, то есть независимо от его загрузки характер протекания саморегулирования не изменяется. Формула изобретения Саморегулирующийся торовый вариант тор, содержащий соосно расположенные шкивы, взаимодействующие с нпми промежуточные фрикциошпле ролики, установленнью с возможностью регулировки их положения, механизм регулирования положения роликов, сёязанный с ним одним когэдом упругий элемент, и орган управления, отличающийся тем, что, с целью расширения диапазона режиме работы вариатора, упругий элемент другим концом кинематически связан с механизмом регулирования положения роликов. Источники информации, принятые во внимание при экспертизе 1.Патент США № 285О911, кл. 74-200, 1958. 2.Авторское свидетельство СССР NS 177249, кл. F16 Н 15/38, 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический торовый вариатор | 1974 |
|
SU579482A1 |
| Автоматический торовой вариатор | 1976 |
|
SU721624A1 |
| Торовый вариатор для транспортного средства | 1972 |
|
SU503070A1 |
| Торовый вариатор | 1985 |
|
SU1293426A1 |
| Торовый вариатор | 1979 |
|
SU796571A1 |
| Автоматический торовый вариатор | 1985 |
|
SU1245785A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| АВТОМАТИЧЕСКИЙ ФРИКЦИОННЫЙ ВАРИАТОР | 1991 |
|
RU2023917C1 |
| ФРИКЦИОННЫЙ ТОРОВЫЙ ВАРИАТОР | 2005 |
|
RU2286495C1 |