1
Изобретение относится к области контрольно-измерительной техники и может быть использовано для измерения угловой скорости вращения вала.
Известны способы измерения скорости вращения с помощью реверсивных бесконтактных тахогенераторов 1 где в-качестве датчиков скорости вращения вала применяются магнитные электрические и фотодатчики. Известные способы измерения угловой скорости вращения не в состоянии обеспечить одновременно высокую точность, быстродействие и диапазон измерения.
Наиболее близким по технической сущности к изобретению является способ измерения с помощью реверсивного бесконтактного тахогенератора 2 заключающийся в фазовой модуляции многофазного сигнала генератора опоного напряжения с помощью бесконтактной индукционной машины, работающей в режиме фазовргицателя, с последующей демодуляцией выходного сигнала индукционной машины тем же сигналом генератора опорного напряжения. Путем фильтрации выходного сигнала первого модулятора выделяется гармоническая составляющая.
частота которой пропорционешьна скорости вращения вала индукционной машины, а амплитуда постоянна. С помощью последующего дифференцирр ания частотно-зависимой цепью выделяется косинусоидсшьный сигнал, амплитуда которого пропорциональна скорости вращения вала. Путем вторичной модуляции сигналом генератора
0 опорного напряжения и фазочувствительного выпр;ямления на выходе устройства получают аналоговый сигнал, величина и знак которого зависят от скорости и направления вращения ва5ла индукционной машины.
Недостаткаи м такого способа измерения скорости вращения являются нелинейность характеристики, а также низкое быстродействие.
0
Целью изобретения является повышение точности и быстродействия измерения.
Указанная цель достигается тем, что по предлагаемому способу выход5ной сигнал индукционной машины преобразуют в сигнал прямоугольной формы, демодулируют его опорным прямоугольным сигналом, преобразуют демодулированный сигнал путем фильт0рации в сигнал треугольной формы и
после дифференцирования этот сиг- . нал с помощью управляющего сигнала, сформированного из сигналов треуголной формы, подают поочередно на выход.
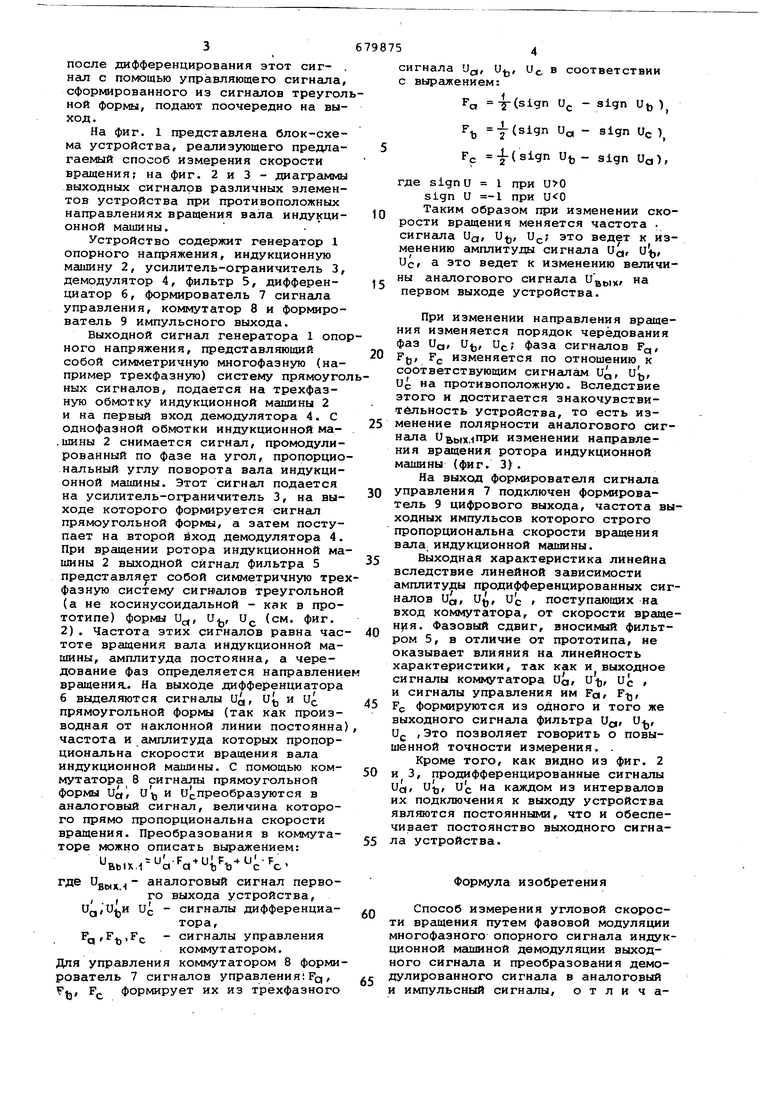
На фиг. 1 представлена блок-схема устройства, реализующего предлагаемый способ измерения скорости вращения на фиг. 2 и 3 - диаграммы выходных сигналов различных элементов устройства при противоположных направлениях вращения вала индукционной машины.
Устройство содержит генератор 1 опорного напряжения, индукционную машину 2, усилитель-ограничитель 3, демодулятор 4, фильтр 5, дифференциатор 6, формирователь 7 сигнала управления, коммутатор 8 и формирователь 9 импульсного выхода.
Выходной сигнал генератора 1 опоного напряжения, представляющий собой симметричную многофазную (например трехфазную) систему прямоуго ных сигналов, подается на трехфазную обмотку индукционной машины 2 и на первый вход демодулятора 4. С однофазной обмотки индукционной ма.шины 2 снимается сигнал, промодулированный по фазе на угол, пропорциональный углу поворота вала индукционной машины. Этот сигнаш подается на усилитель-ограничитель 3, на выходе которого формируется сигнгш прямоугольной формы, а затем поступает на второй йход демодулятора 4. При вращении ротора индукционной машины 2 выходной сигнал фильтра 5 представляет собой симметричную трефазную систему сигналов треугольной (а не косинусоидальной - как в прототипе) формы и,.,, и, Uj. (см. фиг. 2). Частота этих сигналов равна частоте вращения вала индукционной машины, амплитуда постоянна, а чередование фаз определяется направлени вращения.. На выходе дифференциатора 6 выделяются сигналы Ug, u(j и U прямоугольной формы (так как производная от наклонной линии постоянна частота и с1мш1итуда которых пропорциональна скорости вращения вала индукционной машины. С помощью коммутатора 8 сигналы прямоугольной формы и ulj и ОсГ Реобразуются в аналоговый сигнал, величина которого прямо пропорциональна скорости вращения. Преобразования в коммутаторе можно описать выражением:
вь.х. где Ug - аналоговый сигнал первого выхода устройства, ид, Uc - сигналы дифференциатора, FQ,F,FC - сигналы управления
коммутатором.
Для управления коммутатором 8 формирователь 7 сигналов управления FQ , Fv., F формирует их из трехфазного
сигнала и, и,, U, в соответствии с выражением;
FO -f(sign и -sign U, ),
F -i-(sign Ua - sign Uc ),
FC -|-(sign Ut, - sign UQ),
где sign и 1 при sign и -1 при
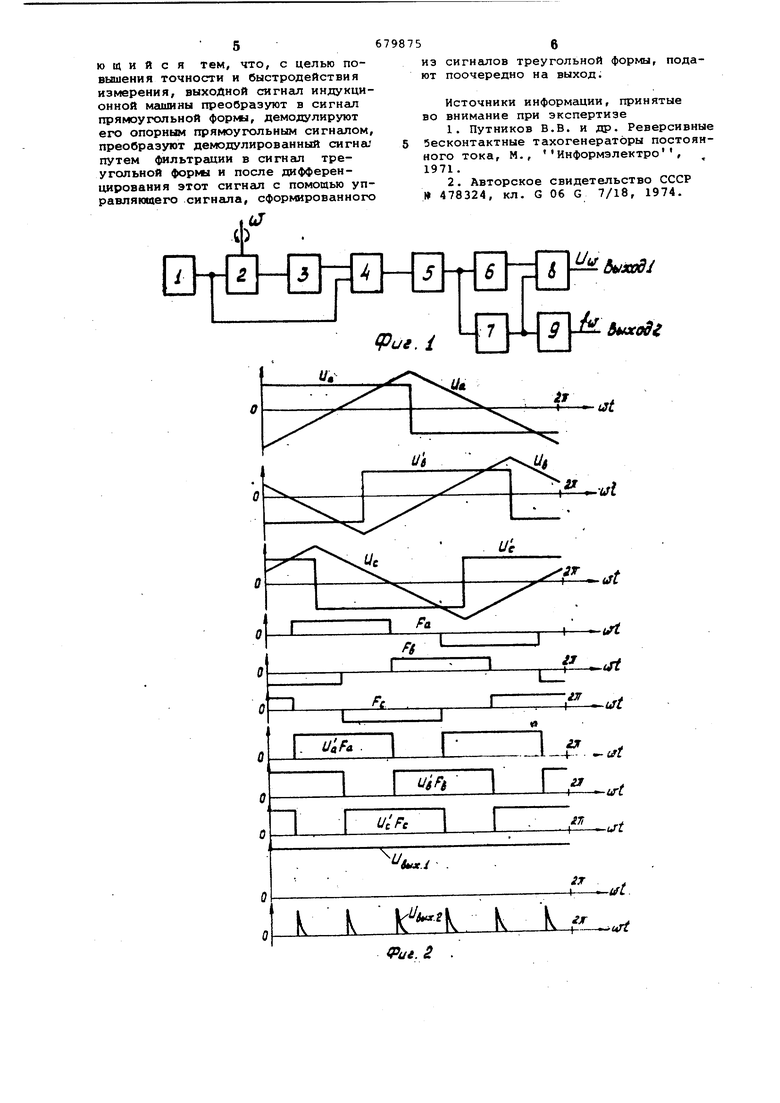
g Таким образом при изменении скорости вращения меняется частота сигнсша UQ, и, Uj.; это ведет к изменению амплитуды сигнала ъ DC, а это ведет к изменению величи. ны аналогового сигнала Ugj,,x, на первом выходе устройства.
При изменении направления вращения изменяется порядок чередования фаз UQ, и, Uc/ фаза сигналов F,
0 Fjj, Fg изменяется по отношению к соответствующим сигналам UQ, U, DC на противоположную. Вследствие этого и достигается знакочувствитбльность устройства, то есть изменение полярности аналогового сигнала и ьгхипри изменении направления вращения ротора индукционной машины (фиг. ЗУ.
На выход формирователя сигнала
0 управления 7 подключен формирователь 9 цифрового выхода, частота выходных импульсов которого строго пропорциональна скорости вращения вала индукционной машины.
5 Выходная характеристика линейна вследствие линейной зависимости амплитуды продифференцированных сигналов UQ, и(, ис , поступающих на вход коммутатора, от скорости враще нря. Фазовый сдвиг, вносимый фильтром 5, в отличие от прототипа, не оказывает влияния на линейность характеристики, так как и выходное сигналы коммутатора UQ, ){), Uc , и сигналы управления им Fa, ,
5 FC формируются из одного и того же выходного сигнала фильтра и, U, Ug ,Это позволяет говорить о повышенной точности измерения. .
Кроме того, как видно из фиг. 2
0 и 3, продифференцированные сигналы fa Utj с кгикдом из интервалов их подключения к выходу устройства являются постоянными, что и обеспечивает постоянство выходного сигнала устройства.
Формула изобретения
Способ измерения угловой скорости вращения путем фаэовой модуляции многофазного опорного сигнала индукционной машиной демодуляции выходного сигнала и преобразования демодулированного сигнала в аналоговый и импульсный сигналы, о т л и ч аю ад И И с Я тем, что, с целью повышения точности и быстродействия измерения, выходной сигнал индукционной машины преобразуют в сигнал прямоугольной формы, демодулируют его опорным прямоугольным сигналом, преобразуют демодулированный сигна; путем 4«льтрации в сигнал треугольной форкы и после дифференцирования этот сигнал с помощью управляющего сигнала, сформированного
из сигналов треугольной формы, подают поочередно на выход.
Источники информации, принятые во внимание при экспертизе
1.Путников В.В. и др. Реверсивные 5есконтактные тахогенераторы постоянного тока, М., Информэлектро, 1971.
2.Авторское свидетельство СССР 478324, кл. G 06 G 7/18, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угловой скорости | 1984 |
|
SU1273810A1 |
| Электропривод переменного тока | 1987 |
|
SU1501241A1 |
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
| Способ измерения угловой скорости вращения | 1978 |
|
SU712759A2 |
| Устройство для формирования сигнала угла поворота вала | 1980 |
|
SU905969A1 |
| Электропривод переменного тока с бесконтактным тахогенератором | 1986 |
|
SU1411912A2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Устройство для измерения частотной неравномерности группового времени запаздывания преобразователей частоты | 1987 |
|
SU1415202A2 |
| Электропривод переменного тока | 1985 |
|
SU1272460A1 |
Uf. S
