5
Изобретение отноеится к средствам ме.хапизапии гра(|)ически работ, в частности к приборам для вычерчивания обводов некоторых форм живой природы, и может быть использовано при разработке и конструировании иоверхпостей и архитектурных оболочек.
Известен нрибор для вычерчивания обводов некоторых форм живой природы, содержап.1ий направляющую, прямолинейное звено с продольной нрорезью, одни.м концом соединенное с направляющей с помощью пальца со взаимно-перпендикулярными лысками, свободно установленного в месте пересечения и.х прорезей, кривощип, шарнирно укрепленный на основании, и две поворотные линейки с продольными прорезями, соединенные с помощью пальца со взаимно-перпендикулярными лысками, несущего пищущий штифт и расположенного на пересечении их прорезей, одна из которых шарнирно соединена с пальцем прямолинейного звена, а другая шарнирно укреплена на основании и связана с кривошипом и со свободным концом прямолинейного звена
при помощи пальца, установленного в месте пересечения их прорезей 1.
Однако такой прибор позволяет вычерчивать только прямой двойной лист, что ограничивает его применение.
Целью изобретения является pacnntpeние диапазона решаемых задач.
Для этого основание вьтолнено в виде планки с продольной прорезью, направляющая расположена под углом к планке и закреплена на ней жестко с возможностью пе|)естановки вдоль нее, а шарнир кривошипа и второй поворотной линейки установлены в прорези иланки.
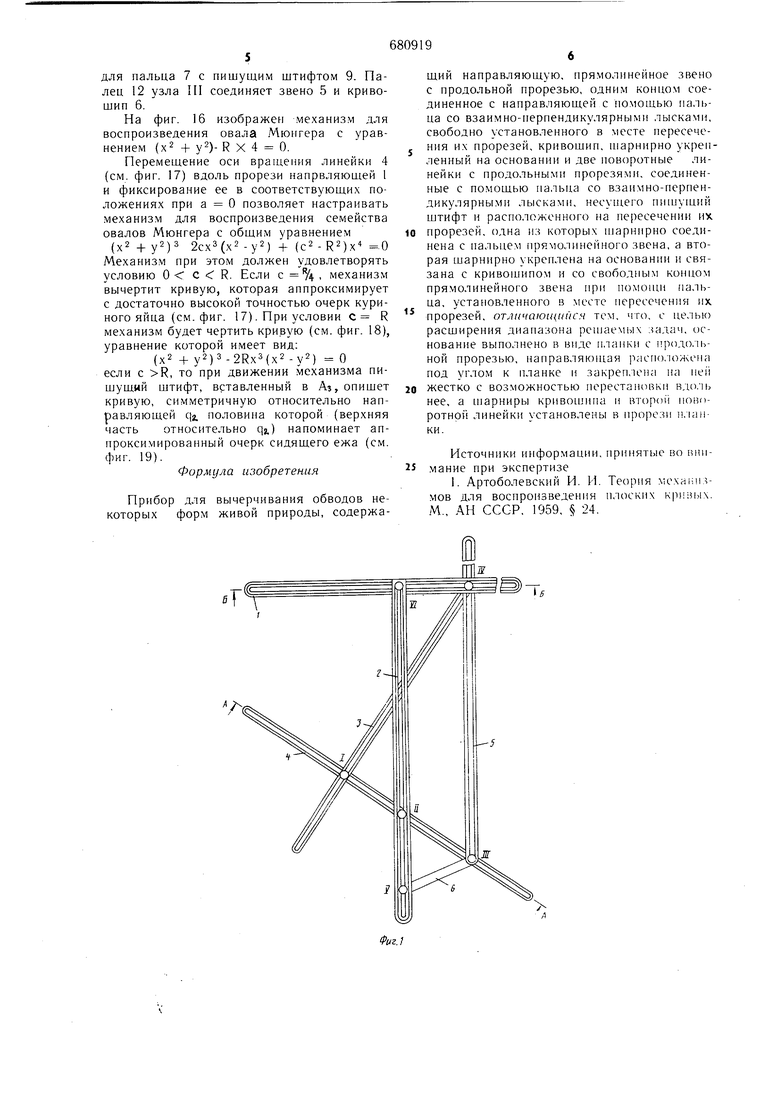
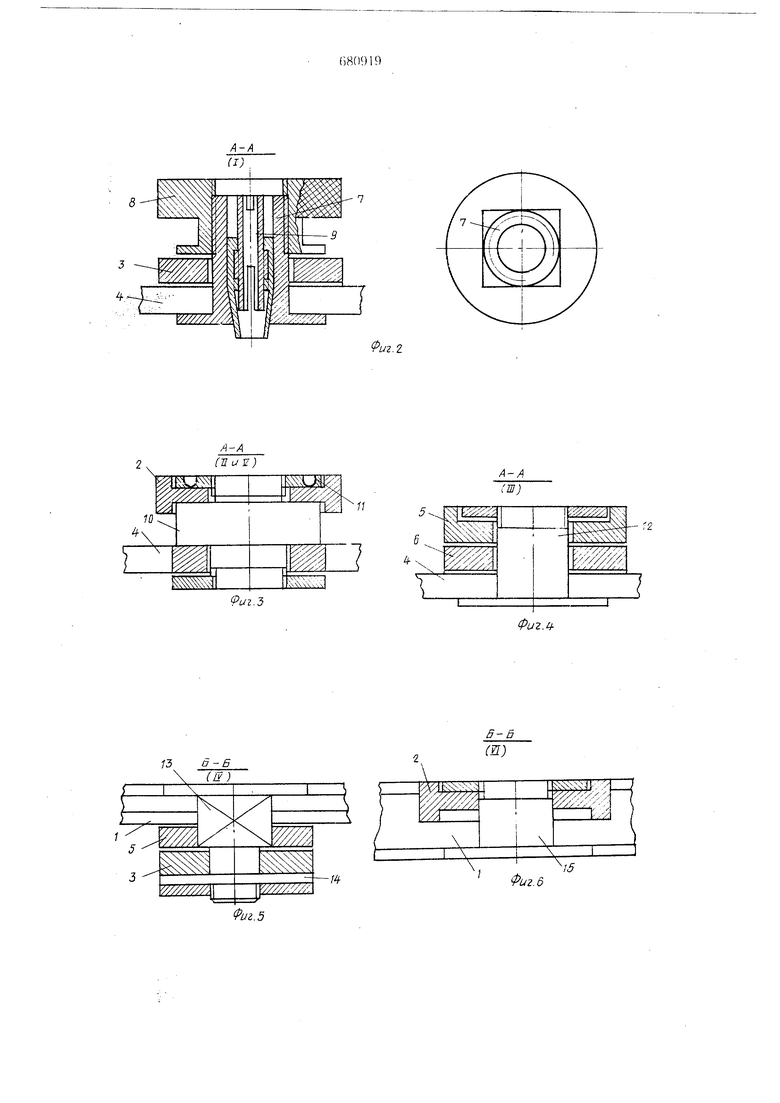
На фиг. 1 изображен предлагаемый прпбор, вид сверху; на фиг. 2 разрез А-А на фиг. 1 (узел 1) и палец; на фиг. 3 - разрез А-А на фиг. 1 (узлы И и V); на фиг. 4 разрез А-А на фиг. 1 (узел III; на фиг. 5 разрез Б-Б на фиг. 1 (узел IV ); на фиг. 6 разрез Б-Б на фиг. 1 (узел VI); па фиг. 7 триадный определитель группы кривых и схема графических построений; на фиг. 8 - взаимное расположение элементов триадного определителя при образовании трехлепестковой розы; на фиг. 9 - кинематическая схема механизма для образования прямого двойного листа; па фиг. 10 - кинематическая схема механизма для образования TpoHHoiO нрямого .чнста е одним укороченным листом; на фиг. 1 1 -- кинематическая схема механизма для воспроизведения тре.хленестковой розы; на фиг. 12 -- кннематнческая схе.ма механизма для восироизведения тройного прямого листа с двумя укороченными листами; на фиг. 13 - кинематическая схема механизма для воспроизведения прямого одиночного листа; на фиг. 14 - кинематическая схема механизма для образования кривой аппроксимирующей очерк личинки насекомого; на фиг. 15 - кинематическая схема механизма для образования кривой, анпроксимирующей очерк летающего существа; на фиг. 16 - кинематическая схема механизма для образования овала Мюнгера (яйца индейки); на фиг. 17 - кинематическая схе.ма механизма для образования кривой (овала Мюнгер.а), аплроксимирующей очерк яйца из семейства куриных; на фиг. 18 - кинематическая схема для вычерчивания кривой яйцевидной формы; на фиг. 19 - кинематическая схема механизма для образования кривой для аппроксимации очерков некоторых животных (ежа, .мыши).
Предлагае.мый прибор содержит направляющую-1, основание 2, поворотные линейки 3 и 4, прямолинейное звено 5 и кривощип 6. Линейки 3 и 4 соединены с номощью пальца 7, имеющего квадратное сече ние, который при помощи гайки 8 с насеч кой закреплен так, что может свободно перемещаться вдоль прорезей линеек. Прибор имеет иищущий штифт 9, оси 10, закрепленные неподвижно на планке 2 при помощи гаек 11, имеющих углубление для рожкового ключа, иалец 12 (см. фиг. 4) ИJapниpпo соединяющий звено 5 и кривошип 6 и скользящий вдоль, продольной арорези линейки 4. Палец 13 квадратного сечения (см. фиг. 5) одновременно скользит вдоль прорезей нанравляюн1ей 1 и звена 5, он же является осью вращения линейки 3. На пего надета регулировочная шайба 14. Болт 15 жестко соединяет направляющую 1 с основанием 2.
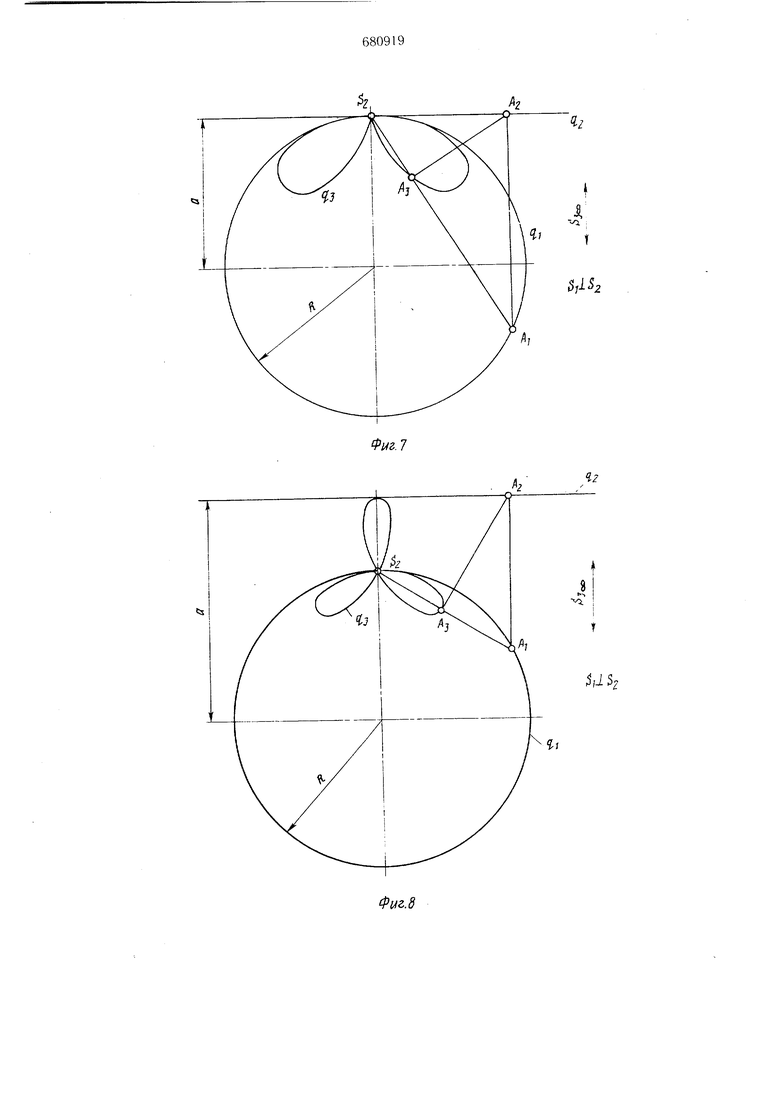
На фиг. 7 показано формообразование прямого двойного листа в триаде Si , Sj, Sjcoqi , Чй В определитель кривой входит блуждающий центр Sa. Каждый луч его
всегда направлен перпендикулярно к соответствующему лучу центра Si . Изменяя взаимное положение элементов определителя кривой цз можно получить три группы кривых линий. Первая группа включает кривые Штейнера, вторая группа показана на фиг. 14 и 15 и третья группа представляет собой кривые яйцевидной формы (см. фиг. 14 и 19). Все эти кривые можно применять для аг проксимации обводов живых форм с достаточно высокой точностью.
На фиг. 7 заключаем, что формообразование нрямого- двойного листа происходит когда параметр а-R(R - радиус окружности q , входящей в определитель кривой), т. е. ряды q и qi, соприкасаются в
точке Si.
Если а 1 т R. то образуемой кривой является тре.хлепестковая роза (см. фиг. 8). Механическая реализация построений в триаде (см. фиг. 7 и 8) приводит к организации восьмизвенника, который после несложной
перестройки может вычертить любую из названных кривых.
Настройка прибора для вычерчивания различных кривых состоит в следующем.
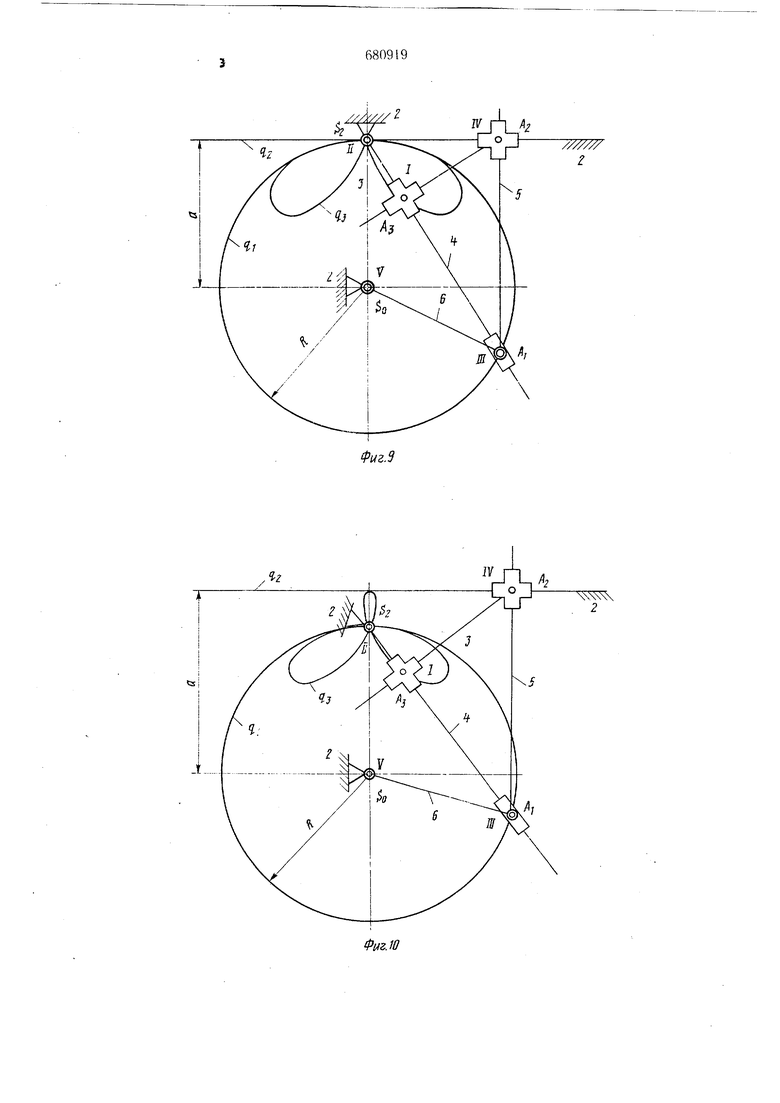
Если направляющую I жестко соединить с основанием нри помонди узла И, выдержав
расстояние между осями узлов V и II равным длине кривошипа 6, пин1ущий штифт 9 будет чертить прямой двойной лист (см. фиг. 9). механизм удовлетворяет условию SoSj. SoA, R; Выдерживая это условие
И жестко скрепляя направляющую 1 с основанием 2 при помощи болта 15 так, чтобы расстояние между осью узла и пальцем 15 узла VI было больше R, механизм .можно настроить для вычерчивания ряда других кривых первой группы. При значениях неременной, удовлетворяющих неравенство
R а R пип1ущий штифт, вставленный в А}, при движении механизма будет чертить прямые тройные листы с одним вертикальным укороченным листом (см. фиг. 10).
При а 1 -j R механизм . воспроизводит трехлепестковую розу (см. фиг. 11).
Если выдерживать условие 1 i: , мехапизм будет воспроизводить прямой тройной лист с двумя укороченными симметричными относительно вертикальной оси листами (см. фиг. 12). Перестроив механизм так, чтобы а 4R, можно воспроизводить семейство одиночных прямых ;1истов. На фиг. 13 показана кинематическая схема механизма для вычерчивания одиночного листа а 4R.
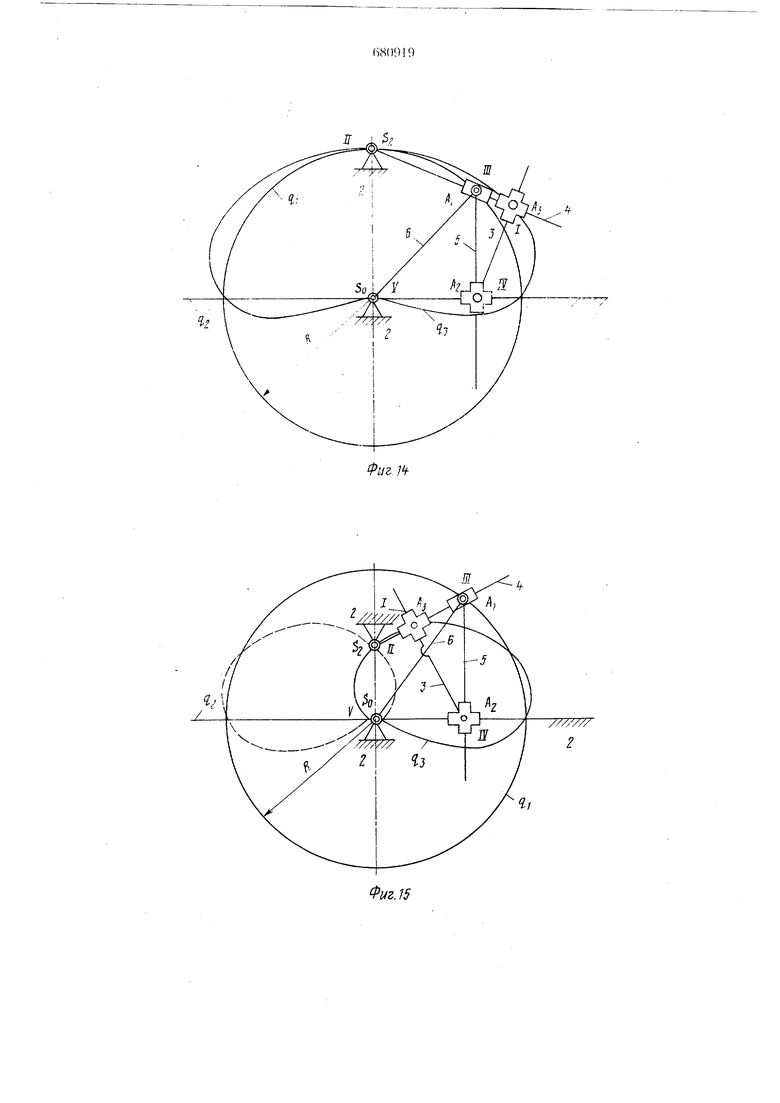
Если же направляющую 1 жестко скрепить с основанием нри по.мощи оси 10 узла (параметр а 0), выдержав расстояние между осями узлов V и Н равным длине кривошипа 6 (см. фиг. 11) то, при движении ме.ханизма точка А опищет кривую, напоминающую очерк личинки живого существа (см. фиг. 14).
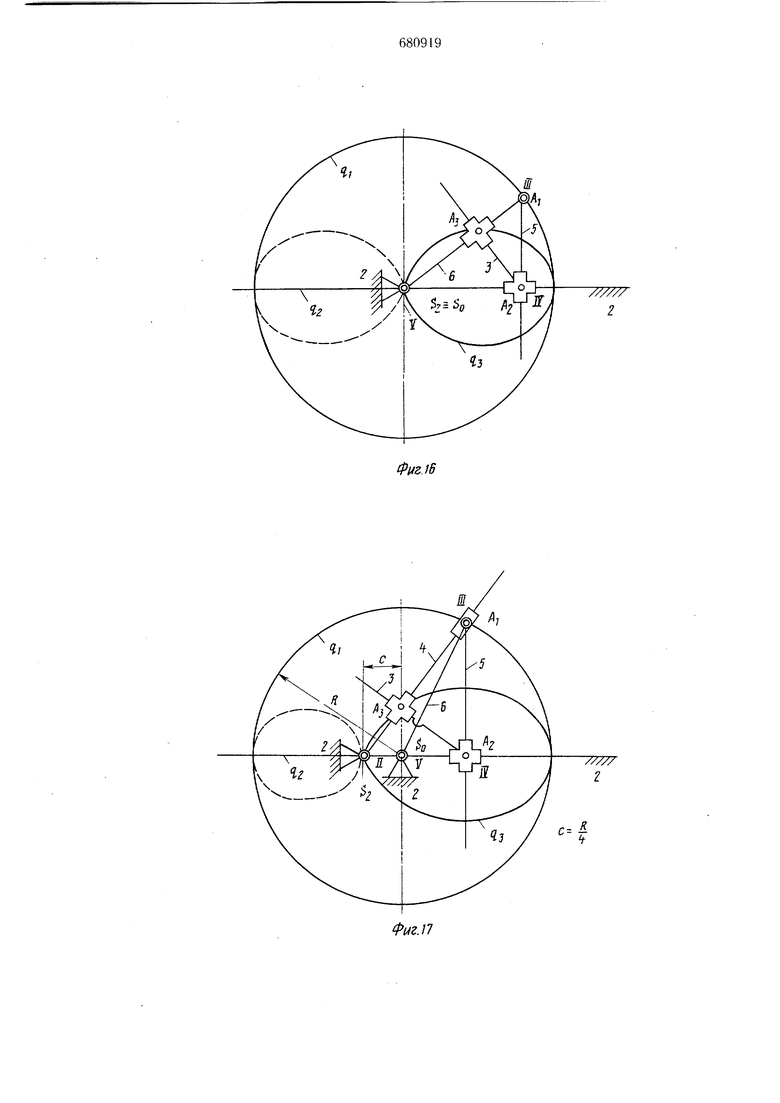
Перемещением оси узла И вдоль продольной прорези основания 2 и фиксированием в положениях, удовлетворяющих неравенство 0 So Зг, R, механизм настраивается для воспроизведения геометрических кривых, напо.минающих летающие существа (см. фиг. 15) или личинки некоторых насекомых. Когда расстояние SaSo О (см. фиг. 16) механизм будет чертить овал Мюнгера (яйцо индейки). При этом ось узла
IIи линейка 4 становятся излишними. Кривошип 6 должен иметь продольную прорезь
для пальца 7 с пишущим штифтом 9. Палец 12 узла III соединяет звено 5 и кривошип 6.
На фиг. 16 изображен механизм для воспроизведения овала Мюнгера с уравнением (х2 -f у2)- R X 4 0.
Перемещение оси врацдеиия линейки 4 (см. фиг. 17) вдоль прорези напрвляющей 1 и фиксирование ее в соответствующих положениях при а О позволяет настраивать механизм для воспроизведения семейства овалов Мюнгера с общим уравнением
(Х2 +y)3 2схЗ(х2 -у2) + (c2-R2)x4 .0
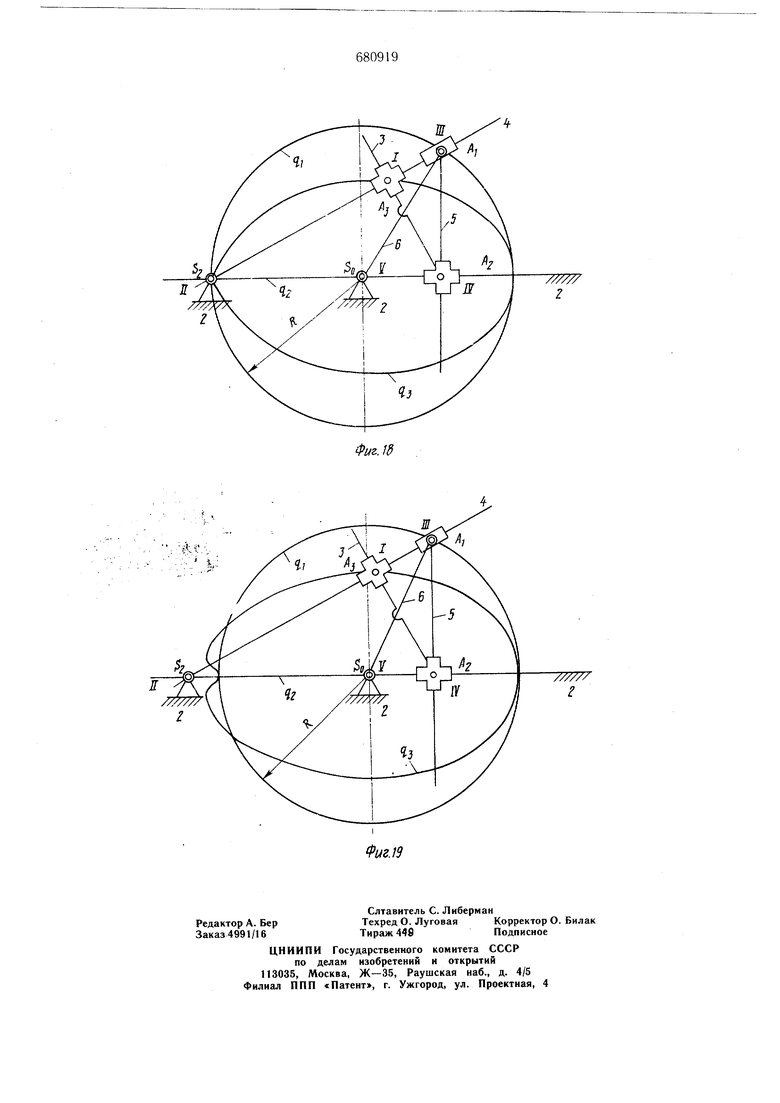
Механизм при этом должен удовлетворять условию О с R. Если с % , механизм вычертит кривую, которая аппроксимирует с достаточно высокой точностью очерк куриного яйца (см. фиг. 17). При условии с R механизм будет чертить кривую (см. фиг. 18), уравнение которой имеет вид(Х2 + y2)3-2Rx3(x2-y2) О
если с R, то при движении механизма пищущий штифт, вставленный в А, опишет кривую, симметричную относительно направляющей q-z. половина которой (верхняя часть относительно q.) напоминает аппроксимированный очерк сидящего ежа (см фиг. 19).
Формула изобретения
Прибор для вычерчивания обводов некоторых форм живой природы, содержащий направляющую, прямолинейное звено с продольной прорезью, одним концом соединенное с направляющей с помощью пальца со взаимно-перпендикулярными лысками, свободно установленного в месте пересечения их прорезей, кривошип, шарнирно укрепленный на основании и две поворотные линейки с продольными прорезями, соединенные с помощью пальца со взаимно-перпендикулярными лысками, несущего пишущий щтифт и расположенного на пересечении их прорезей, одна из которых щарнирно соеди0нена с пальцем прямолинейного звена, а вторая щарнирно укреплена на основании и связана с кривошипом и со свободным концом прямолинейного звена при помоп1и пальца, установленного в месте пересечения их
5 прорезей, отл 1чаюи(ч{1ся тем, что, с целью расширения диапазона решаемых ;и1дач, основание выполнено в виде планки с продольной прорезью, направляющая расположена под углом к планке и закреплена на iieii жестко с возможностью перестановки вдоль
0 нее, а шарниры кривошипа и второй поворотной линейки установлены в прорези п.лапки.
Источники информации, принятые во внимание при экспертизе
1. Артоболевский И. И. Теория мсхнг.плмов для воспроизведения плоских крииых М., АН СССР, 1959, § 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| Коникограф для образования плоских обводов | 1974 |
|
SU680920A1 |
| Прибор для вычерчивания кривых 3-го и 4-го порядков | 1973 |
|
SU686905A1 |
| Прибор для вычерчивания кривых второго порядка | 1980 |
|
SU925682A1 |
| Прибор для вычерчивания листадЕКАРТА | 1979 |
|
SU848376A1 |
| Прибор для вычерчивания кривых 3-го порядка | 1972 |
|
SU686904A1 |
| Прибор для воспроизведения эллипса и гиперболы | 1980 |
|
SU901069A1 |
| Прибор для вычерчивания кривых | 1986 |
|
SU1362669A1 |
| Механизм для воспроизведения виртуальной параболы Крамера | 1983 |
|
SU1094758A1 |
| Кулисно-рычажный механизм Мамырина для воспроизведения и огибания астроиды | 1986 |
|
SU1381008A1 |
| Прибор для вычерчивания кривых 3-го и 4-го порядков | 1974 |
|
SU686906A1 |

.Г
1л
Е
9и1.Ъ
А-А
(Ш)
V /3 и Б
«/
J.
Яг
fc
Фиг 12
Фиг-П
It
Ф11г.15
s
Ш
////// 2
Фиг.П
