(54) СИНХРОНИЗИРОВАННЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронизированный вентильный электродвигатель | 1981 |
|
SU991571A1 |
| Вентильный электродвигатель | 1979 |
|
SU828930A1 |
| Вентильный электродвигатель | 1977 |
|
SU743129A1 |
| Регулируемый ветнильный электродвигатель | 1977 |
|
SU684684A1 |
| Устройство для стабилизации час-ТОТы ВРАщЕНия бЕСКОНТАКТНОгО элЕКТРО-дВигАТЕля пОСТОяННОгО TOKA | 1978 |
|
SU813648A1 |
| Вентильный двигатель | 1975 |
|
SU692013A1 |
| Способ управления вентильным двигателем и устройство для его осуществления | 1979 |
|
SU807973A1 |
| Стабилизированный вентильный электропривод | 1988 |
|
SU1693696A1 |
| Вентильный электродвигатель | 1980 |
|
SU951582A1 |
| Вентильный двигатель | 1980 |
|
SU944472A2 |
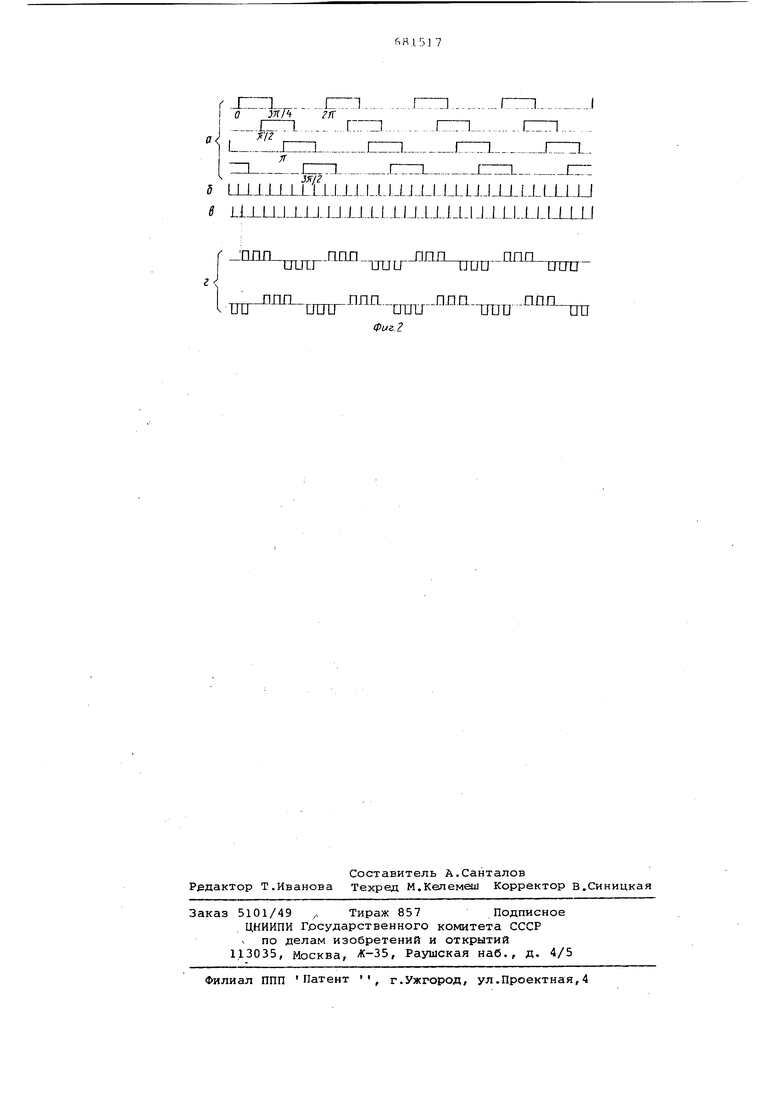
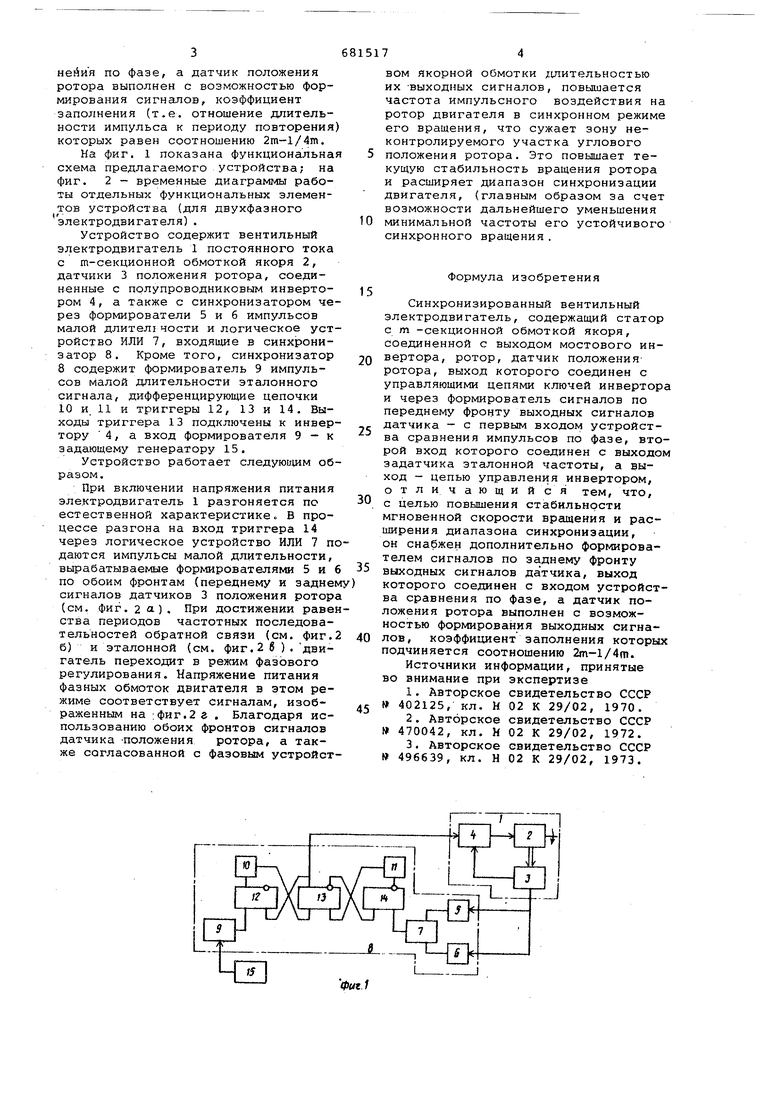
Изобретение относится к вентильн электродвигателям с устройствами си хронизации и может быть применено в автоматизированном электроприводе. Известны вентильные электродвига тели с устройствами стабилизации и регулирования частоты вращения, осу ществляющими сравнение по фазе импульсов частотного датчика скорости задающего генератора и управление двигателем в функции фазового рассогласования сравниваемых частот 1 {2. Устройства совмещают функции датчика положения ротора двигателя с функцией дискретного датчика частоты вращения, что упрощает констру цию и повышает надежность электропривода в целом. Наиболее близким по технической сущности к предлагаемому является электродвигатель, содержащий статор с т-секционной обмоткой якоря, соединенной с выходом мостового инвертора, ротор с датчиком положения ротора, выход которого соединен с управляющими цепями -ключей инвертора и через формирователь сигналов по переднему фронту - с первым входом устройства сравнения импульсов по фазе, второй вход которого соединен с выходом задатчика эталонной частоты, а выход - с цепью управления инвертором 3 . Недостатком известных устройств является узкий рабочий диапазон синхронизации вследствие ухудшающейся стабильности мгновенной частоты вращения электродвигателя в синхронном режиме на пониженных частотах вращения. Это обусловлено невысокой точностью частотного датчика скорости, так как в качестве последнего используется импульсная последовательность, сформированная лишь по одному из фронтов сигналов датчика положения ротора. Цель изобретения,- расширение диапазона синхронизации и повышения стабильности мгновенной скорости вращения электродвигателя в синхронном режиме. Для этого предлагаемый электродвигатель дополнительно снабжен формирователем сигналов по заднему фронту выходных сигналов датчика положения ротора, выход которого соединен с входом устройства сравHe vifi по фазе, а датчик положения ротора выполнен с возможностью формирования сигналов, коэффициент заполнения (т.е. отношение длительности импульса к периоду повторения) которых равен соотношению 2т-1/4т. На фиг. 1 показана функциональная схема предлагаемого устройства; на фиг. 2 - временные диаграммы работы отдельных функциональных элементов устройства {для двухфазного электродвигателя). Устройство содержит вентильный электродвигатель 1 постоянного тока с т-секционной обмоткой якоря 2, датчики 3 положения ротора, соединенные с полупроводниковым инвертором 4, а также с синхронизатором че рез формирователи 5 и б импульсов малой длител чости и логическое уст ройство ИЛИ 7, входящие в синхронизатор 8. Кроме того, синхронизатор 8 содержит формирователь 9 импульсов малой длительности эталонного сигнала, дифференцирующие цепочки 10 и 11 и триггеры 12, 13 и 14. Выходы триггера 13 подключены к инвер тору 4, а вход формирователя 9 - к задающему генератору 15. Устройство работает следуюишм об разом. При включении напряжения питания электродвигатель 1 разгоняется по естественной характеристике В процессе разгона на вход триггера 14 через логическое устройство ИЛИ 7 п даются импульсы малой длительности, вырабатываемые формирователями 5 и по обоим фронтам (переднему и задне сигналов датчиков 3 положения ротор (см. фиг. 2 а). При достижении раве ства периодов частотных последовательностей обратной связи (см. фиг. б) и эталонной (см. фиг.2 8 ). двигатель переходит в режим фазового регулирования. Напряжение питания фазных обмоток двигателя в этом режиме соответствует сигналам, изображенным на :фиг.2г . Благодаря использованию обоих фронтов сигналов датчика положения ротора, а также согласованной с фазовым устройст
Фиг 1
L..Lz:V( вом якорной обмотки длительностью их -выходных сигналов, повышается частота импульсного воздействия на ротор двигателя в синхронном режиме его вращения, что сужает зону неконтролируемого участка углового положения ротора. Это повышает текущую стабильность вращения ротора и расширяет диапазон синхронизации двигателя, (главным образом за счет возможности дальнейшего уменьшения минимальной частоты его устойчивого синхронного вращения . Формула изобретения Синхронизированный вентильный электродвигатель, содержащий статор с m -секционной обмоткой якоря, соединенной с выходом мостового инвертора, ротор, датчик положенияротора, выход которого соединен с управляющими цепями ключей инвертора и через формирователь сигналов по переднему фронту выходных сигналов датчика - с первым входом устройства сравнения импульсов по фазе, второй вход которого соединен с выходом задатчика эталонной частоты, а выход - цепью управления инвертором, отличающийся тем, что, с целью повышения стабильности мгновенной скорости вращения и расширения диапазона синхронизации, он снабжен дополнительно формирователем сигналов по заднему фронту выходных сигналов датчика, выход которого соединен с входом устройства сравнения по фазе, а датчик положения ротора выполнен с возможностью формирования выходных сигналов, коэффициент заполнения которых подчиняется соотношению 2m-l/4m. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 402125, кл. Н 02 К 29/02, 1970. 2.Авторское свидетельство СССР 470042, кл. М 02 К 29/02, 1972. 3.Авторское свидетельство СССР 496639, кл. Н 02 К 29/02, 1973.
f-JUTL,E.T..
I 0 w/4 ггг
5 LllllI LlIiJJ i....LLL. e LiJLUJ J UJJJJ...i.lJJ,I.iJ.L...LI..LLLLLLI
-° 4nJir- TKJLr 4inn-™
ШГ-° ПП1Г -ОБи- -TIDU- Tjn
Timj
Фиг 2
