1
Изобретение относится к электротехнике, а точнее к устройствам синхронизации и управления бесконтактными электродвигателями постоянного тока, и может быть применено в автоматизированном электроприводе.
Известно устройство для стабилизации скорости вращения электродвигателя постоянного тока, содержащее генератор эталонной частоты, датчик частоты, пропорциональный скорости двигателя, триггер и усилитель мощности 1.
Недостаток этого устройства состоит в том, что сложно обеспечивается синхронизация двигателя, т. е. переход с пускового режима на режим стабилизации частоты вращения.
Известно также устройство стабилизации частоты вращения бесконтактных электродвигателей постоянного тока, содержащее электродвигатель, датчик положения ротора, частотный датчик скорости (обычно последовательность импульсов,снимаемых с датчика положения ротора), полупроводниковый коммутатор, задающий генератор, синхронизатор и логическое устройство И, вход которого соединен с датчиком положения
ротора и синхронизатором, а выход - с полупроводниковы.м коммутатором 2.
Однако наличие погрешностей узлов и элементов датчиков положения ротора (ДПР) как технологической, так и электрической природы обусловливает значительную асимметрию напряжения питания фаз электродвигателя, что, в свою очередь, вызывает колебания мгновенной частоты вращения электродвигателя и ухудшает точность стабилизации. Это вызывает нестабильность мгновенной частоты вращения электродвигателя на порядок, больщую нестабильности, обусловливаемой другими дестабилизирующими фактора.ми. Снижение влияния погрещностей (си.мметрирование) ДПР техгологическим путем является трудной и ограниченной задачей.
Цель изобретения - повышение точности стабилизации частоты вращения бесконтактного двигателя постоянного тока.
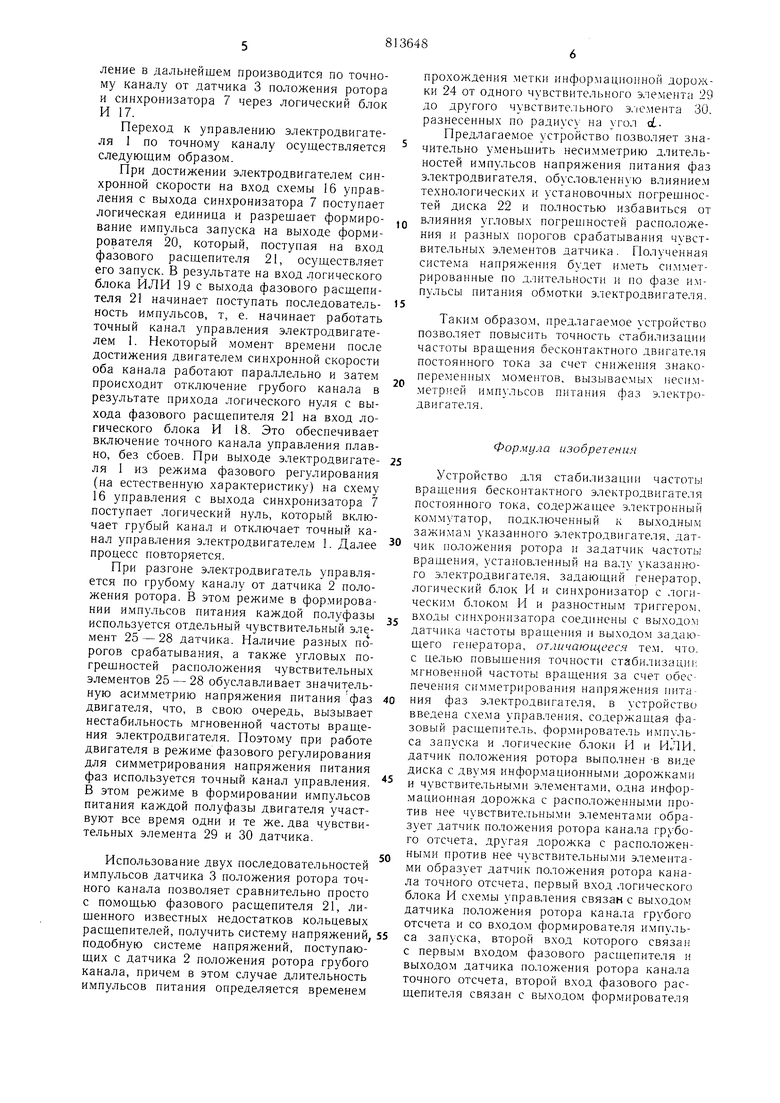
Поставленная цель достигается те.м, что в устройство для стабилизации частоты вращения бесконтактного электродвигателя постоянного тока введена схема управления, содержащая фазовый расщепитель, формирователь импульса запуска и логические блоки И и ИЛИ, а датчик положения ротора выполнен в виде диска с двумя информационными дорожками и чувствительными элементами, нричем первая информационная дорожка с расположенными против нее чувствительными элементами образует датчик положения ротора канала грубого отсчета, вторая дорожка с расноложенными против нее чувствительными элементами образует датчда ноложения ротора капала точного отсАетд тт рвый вход логического блока И схемы управления связан с выходом датчика ноложепия ротора канала грубого отсчета и со входом формирователя импульса запуска, второй вход которого связан с- первым входом фазового расщепителя и выходом датчика положения ротора канала точного отсчета, второй вход фазового расгцепителя связан с выходом формирователя импульса запуска, а третий вход фазового расщепителя связан с третьим входом формирователя импульса запуска и выходом логического блока И синхронизатора, прямой выход разностного триггера синхронизатора связан с логическим блоком И, выход которого связан со входом электронного коммутатора, а второй вход логического блока И связан с выходом логического блока ИЛИ схемы управления, первый вход которого связан с первым выходом фазового расщепителя, а второй вход связан с выходом логического блока И схемы управления, второй вход которого связан со вторым выходом фазового расп1енителя. На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 -возможный вариант выполнения датчика положения ротора. С валом электродвигателя 1 жестко связаны датчик 2 положения ротора грубого канала и датчик 3 положения ротора точного канала (фиг. 1). Электронный коммутатор 4. электрически связанный с электродвигателем образуют бесконтактный двигатель прстоянного тока. Частотный х1атчик 5 скорости и задающий генератор 6 своими выходами связаны со входами синхронизатора 7, содержащего формирователи 8 - 1 малой длительности, триггеры 12, 13 и 14, логический блок И 15. Выходы синхронизатора связаны со схемой 16 управления и логическим блоком И 17. Датчик 2 положения ротора грубого канала, логический блок И 18 и логический блок ИЛИ 19 образуют грубый канал управления электродвигателем. Датчик 3 положения ротора точного канала, формирователь 20 имнульса запуска, фазовый расщепитель 21 и логический блок ИЛИ 19 образуют точный канал управления электродвигателем. При этом входы формирователя 20 импульса запуска связаны с выходами датчика 2 положения ротора грубого канала, датчика 3 положения ротора точного канала и синхронизатора 7, а выход связан со входом фазового расщепителя 21, который другими своими входами связан с выходами датчика 3 положения ротора точного канала и синхронизатора 7. ;: )1ми выходами связан со входами ло1м-- них блоков И 18 и ИЛИ 19 схемы управления. Выход логического блока И 18 схемы управления связан со входом логического блока ИЛИ 19, выход которого через логический блок И 17 связан со входом электронного коммутатора 4. Датчики 2 и 3 положения ротора грубого и точного каналов выполнены совмещенными в виде диска 22 (фиг. 2), который имеет два ряда информационных дорожек 23 и 24 с метками, где против дорожки 23 расположены чувствительные элементы 25 -- 28, которые образуют датчик но;1ожения ротора грубого канала, а против дорожки 24 расположены чувствител1щые элементы 29 и 30, которые o6pa3VK)T датчик положения ротора точного канала. Устройство работает следующим образом. При вк.лючении напряжения питания на синхронизатор 7 приходит последовательность импульсов с задающего гсператора 6, при этом выход логического блока И 15 синхронизатора 7 устанавливается в состояние логического ну.чя, а выход разностного триггера 13 синхронизатора устанавливается в состояние логической единицы. Приход логического нуля с выхода синхронизатора 7 на вход формирователя 20 импульса занренхает формирование имнульса, которым запускается фазовый расщепитель 21, в результате на вход логического блока ИЛИ 19 с выхода фазового расщепителя 21 поступает логический nvjib. Приход же логического нуля с синхронизатора 7 на вход фазового расщепителя 21 обуславливает состояние логической единицы на другом его выходе, который, ноступая на логический- блок И 18, разреншет ирохождение импульсов с ;1атчика 3 положения ротора грубого канала через логический блок И 18, логический блок ИЛИ 19 и логический блок И 17 на электронный коммутатор 4. В таком состоянии синхронизатора 7 и схемы 6 управления электродвигатель 1 управляется по грубому каналу от датчика 2 положения ротора, в результате чего разгон электродвигателя осуществляется по естественной механической характеристике. С выхода частотного датчика 5 скорости на вход сиихронизатора 7 ноступает последовательность импульсов, частота которых пропорциональна скорости электродвигателя 1. Электродвигатель разгоняется до тех пор, пока частота импульсов датчика 5 скорости несколько не превысит частоту импульсов задающего генератора 6. В этот момент электродвигатель 1 переходит в режим фазового регулирования и его управление в дальнейшем производится по точному каналу от датчика 3 положения ротора и синхронизатора 7 через логический блок И 17.
Переход к управлению электродвигателя 1 по точному каналу осуществляется следуюпдим образом.
При достижении электродвигателе.м синхронной скорости на вход схемы 16 управления с выхода синхронизатора 7 поступает логическая единица и разрешает формирование импульса запуска на выходе формирователя 20, который, поступая на вход фазового расшепителя 21, осуществляет его запуск. В результате на вход логического блока ИЛИ 19 с выхода фазового расщепителя 21 начинает поступать последовательность импульсов, т, е. начинает работать точный канал управления электродвигателем I. Некоторый мо.мент времени после достижения двигателем синхронной скорости оба канала работают параллельно и затем происходит отключение грубого канала в результате прихода логического нуля с выхода фазового расшепителя 21 на вход логического блока И 18. Это обеспечивает включение точного канала управления плавно, без сбоев. При выходе электродвигателя 1 из режима фазового регулирования (на естественную характеристику) на схему 16 управления с выхода синхронизатора 7 поступает логический нуль, который включает грубый канал и отключает точный канал управления электродвигателем 1. Далее процесс повторяется.
При разгоне электродвигатель управляется по грубому каналу от датчика 2 положения ротора. В это.м режиме в формировании импульсов питания каждой полуфазы используется отдельный чувствительный элемент 25 - 28 датчика. Наличие разных порогов срабатывания, а также угловых погрешностей расположения чувствительных элементов 25 - 28 обуславливает значит ельную асимметрию напряжения питания фаз двигателя, что, в свою очередь, вызывает нестабильность мгновенной частоты вращения электродвигателя. Поэтому при работе двигателя в режиме фазового регулирования для симметрирования напряжения питания фаз используется точный канал управления. В этом режиме в фор.мировании импульсов питания каждой полуфазы двигателя участвуют все время одни и те же. два чувствительных эле.мента 29 и 30 датчика.
,.„
Использование двух последовательностей
импульсов датчика 3 положения ротора точного канала позволяет сравнительно просто с помощью фазового расщепителя 21, лишенного известных недостатков кольцевых расщепителей, получить систе.му напряжений, подобную системе напряжений, поступающих с датчика 2 положения ротора грубого канала, причем в этом случае длительность импульсов питания определяется времене.м
прохождения метки информацио1 ной дорожки 24 от одного чувствительного элеме}|та 29 до другого чувствительного э.че.мента 30. разнесенных по радиусу на угол oL.
Предлагаемое устройство позволяет значительно у.меньшить несимметрию длительностей и.мпульсов напряжения питания фаз электродвигателя, обусловленную влиянием технологических и установочных погрешностей диска 22 и полностью избавиться от влияния угловых погрешностей расположения и разных порогов срабатывания чувствительных элементов датчика. Полученная система напряжения будет и.меть симметрированные по длительности и по фазе импульсы питания обмотки электродвигателя.
Таким образом, предлагаемое устройство позволяет повысить точность стабилизации частоты вращения бесконтактного двигателя постоянного тока за счет снижения знакопеременных .мо.ментов, вызываемых неси.м.метрпей имп льсов питания фаз электродвигателя.
Формула изобретения
Устройство для стабилизации частоты вращения бесконтактного электродвигателя постоянного тока, содержащее электронный ком.мутатор, подключенный к выходным зажимам указанного электродвигателя, датчик положения ротора и задатчик частоты вращения, установленный на валу указанн-ого электродвигателя, задающий генератор, логический блок И и синхронизатор с логическим блоком И и разностным триггером, входы синхронизатора соединены с выходом датчика частоты врап1ения и выходом задающего генератора, отличающееся те.м. что. с целью повышения точности стабилизаци -: мгновенной частоты вращения за счет обеспечения симметрирования напряжения питания фаз электродвигателя, в устройство введена схе.ма управления, содержащая фазовый расщепитель, фор.мнрователь импульса запуска и логические блоки И и ИЛИ, датчик положения ротора выполнен -в виде диска с двумя инфор.мационными дорожками и чувствительными элементами, одна инфор.мационная дорожка с расположенпы.ми против нее чувствительными эле.мента ми образует датчик положения ротора канала грубого отсчета, другая дорожка с расположенными против нее чувствительными элементами образует датчик положения ротора канала точного отсчета, первый вход логического блока И схемы управления связан с выходом датчика положения ротора канала грубого отсчета и со входом формирователя импульса запуска, второй вход которого связан с первым входом фазового расщепителя и выходом датчика положения ротора канала точного отсчета, второй вход фазового расщепителя связан с выходом формирователя
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизированный по скорости электропривод | 1980 |
|
SU964946A1 |
| Устройство для импульсного регулиро-ВАНия фАзОВОгО пОлОжЕНия POTOPA СиН-ХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU817960A1 |
| Синхронизированный вентильный электродвигатель | 1978 |
|
SU681517A1 |
| Устройство импульсного регулирования фазового положения ротора синхронного двигателя | 1973 |
|
SU472434A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2202147C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
