Изобретение относится к регулируемым вентильным электроприводам постоянного тока и может быть использовано в электроприводах с нереверсивными вентильными преобразователями, работающими с прерывистыми токами, а также в электроприводах с реверсивными преобразователями dtes уравнительных токов.
Известны электроприводы постоянного тока, содержащие вентильный преобразователь без уравнительных токов с так называемыми адаптивными регулHTopaf/ui тока, в которых в зависимости от режима работы преобразователя осуществляется перестройка регулятора тока. Эта перестройка необходима для обеспечения высокого качества регулирования тока и скорости двигателя режимах непрерывного, так и в режимах прерывистого тока преобразователя и осуществляется релейно (скачком) в зависимости от величины тока двигателя так, что в режиме прерывистых токов, в момент бестоковой паузы, регулятор тока представляет собой интегральное (И) звено, а в режиме непрерывного тока - пропорционально-интегральное (ПИ)
звено с передаточной функцией
(-1)
E(j - активное
сопротивление
где ги индуктивность якорной цепи двигателя в сумме с внутренними
o эквивалентными параметрами преобразователя в режиме непрерывного тока ;
коэффициент передачи
5 вентильного преобразователя;
постоянная времени фильтра, устанавливаемого на входе системы
0 илшульсно-фазового управления (СИФУ) преобразователя для обеспечения помехозащнщенйости и работоспособ5ности (при учете дискретности управления) вентильного преобразователя. (Здесь и далее все переменные и параметры, кроме постоянных времени, рассматриваются в относи тельных единицах, В качестве базовых вели чин принимаются номинальные значения соот ветствующих переменных) 1. При прерывистом токе вентильного преобразователя такой адаптивный регулятор работает в режиме широтно импульсного модулированного переклю чения и является по сути самонастра вающимся корректирующим элементом с коррекцией пагЬаметров в функции тока с возможным запаздыванием в самонастройке на период дискретности преобразователя. Кроме запаздывания в самонастройке, электроприво ды с такими регуляторами имеют и другие надостатки: низкая помехозащищенность, связанная с наличием в системе регулирования дискретных элементов с весьма низким порогом срабатывания, сложность в настройке чрезвычайно высокие требования к полосе пропускания измерителей токов и регуляторов. Поэтому весьма перспективным представляется применение электропр водов с другим классом самон.астраив щихся регуляторов тока - электропри водов, в которых перестройка парамет ров регуляторов производится не в функции тока, а в функции управляющ го сигнала, и не дискретно, а плавн Наиболее близким техническим решением к изобретению является элект ропривод, в котором используется вентильный преобразователь без урав нительных токов, питающий якорную цепь двигателя постоянного тока, регулятор скорости, вход которого соединен с выходом задающего устрой ства и с датчиком скорости, пропорциональный регулятор тока, в цепи обратной связи которого установлен нелинейный элемент, причем один вход регулятора тока соединен с выходом регулятора скорости, второй вход подключен к датчику тока, а выход пропорционального регулятора тока соединен со входом вентильного преобразователя. В таком электропри воде для линеаризации зависимости между TOKOiri вентильного преобразова теля и напряжением управления приме нен нелинейный элемент. Характеристика нелинейного элемента выбирается в соответствии с характеристикой вентильного преобразователя 2. Известно, что в режиме прерывистого тока, когда ток в течение опре деленнЬ1Х интервалов времени равен нулю, эквивсшентное внутреннее сопр тивление вентильного .преобразоватерезко возрастает и является функцией напряжения управления на 84 входе СИФУ и противо-ЭДС нагрузки. (Вентильный преобразователь с цепью нагрузки можно представить в виде эквивалентного генератора с неизменным коэффициентом передачи К, работающего на противо-ЭДС, индуктивность якорной цепи и нелинейное активное сопротивление, величина которого зависит от напряжения управления преобразователем и от величины противо-ЭДС). Поэтому коэффициент передачи нелинейного элемента должен выбираться в соответствии с равенствомВ этом электроприводе обеспечивается примерно одинаковое качество регулирования скорости как в режиме непрерывного, так и в режиме прерытзистого токов. Однако существенным недостатком этого электропривода является то, что здесь может быть применен только пропорциональный регулятор тока (ввиду наличия нелинейного элемента в цепи обратной связи регулятора) . Коэффициент усиления регулятора при работе привода с непрерывным током преобразователя не может быть выбран большим, чем П-часть передаточной функции (1): При этом в режиме непрерывного тока контур регулирования тока двигателя будет статическим с ошибкой в токе, определяемой соотношением cf- где Т - электромагнитная посd тоянная времени якорной цепи двигателя. Ошибка в токе при реальных параметрах электропривода может достигать нескольких десятков процентов и приводит к недоиспользованию двигателя в режимах упора и в режимах пуска и торможения привода с предельным током двигателя, а также к увеличению динамической ошибки в скорости . В конечном счете наличие такой ошибки в таком электроприводе . приводит к ухудшению его статических и динамических характеристик. Такой электропривод не нашел применения для мощных механизмов с высокими требованиями к качеству регулирования, например для металлургической промышленности. Цель изобретения - получение высокого качества статических и динамических характеристик электропривода во всем диапазоне изменения тока и напряжения вентильного преобразователя. Указанная цель достигается тем, что в электропривод, содержащий вентильный преобразователь, ограничитель углов управления вентилями, регулятор скорости датчика тока, датчик ЭДС, нелине;;ный элемент и пропорциональный регулятор тока, входы которого соединены с выходами ,регулятора скорости, датчики тока, датчика ЭДС и нелинейного элемента, а выход пропорционального регулятора тока соединен со входом вентильного преобразователя и со входом ограничителя углов управления вентилями, дополнительно введен интегральньлй регулятор тока, выход которого соединен со входом нелинейного элемента, а входы подключены к выходу регулятора скорости и к выходу датчика тока. Кроме того, выход ограничителя углов управления соединен с третьим входом интегрального регулятора тока. Поскольку в режиме прерывистого тока изменяется только активное сопротивление якорной депя, в этом режиме необходимо изменять лишь интегральную составляющую регулятора тока, что и достигается введением интегрального регулятора тока, выход которого через нелинейный элемент соединен с пропорциональным регулятором тока.
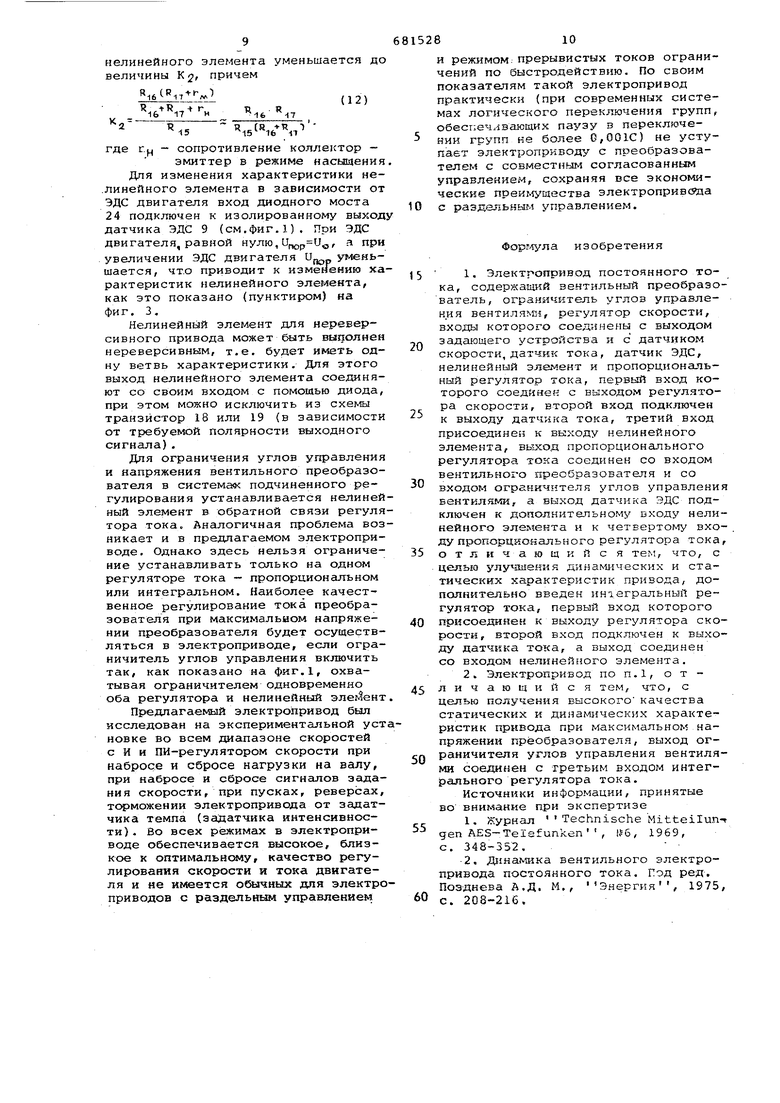
На фиг. 1 приведена функциональная схема предлагаемого электропривода постоянного тока; на фиг. 2 - структурная схема электропривода: а) исходная, б) преобразованная; на фиг, 3 - характеристики нелинейного элемента при различных ЭДС преобразователя (сплошной линией - характеристики идеального нелинейного элемента; пунктиром - упрощенного, при апроксимацни кривой тремя линиями); на фиг. 4 - принципиальная схема упрощенного варианта нелинейного элемента.
Электропривод (см.фип.) содержит вентильный преобразователь 1, питающий якорную цепь двигателя 2, датчик скорости (тахогенератор) 3, напряжение на выходе которого служит в качестве сигнала обратной связи регулятора скорости 4, интегральный.регулятор тока 5; воздействующий на нелинейный элемент 6 (характеристика которого приведена на фиг.З), пропорциональный регулятор тока 7, датчик тока 8, напряжение выхода которого служит в качестве сигнала обратной связи регуляторов тока 5 и 7, датчик ЭДС 9, на вход которого действуют сигналы датчика тока 8 и датчика 10 напряжения на двигателе, ограничитель 11 углов управления вентилями, ограничитель 12 максимального тока и згщакацее устройство 13, выходной сигнал которого является заданием на скорость двигателя. Выходной сигнал регулятора скорости 4 служит заданием для регуляторов тока 5 и 7 , Вентильный преобразователь работает без уравнительных токов,
т.е. для реверсивных электроприводов выполняется с раздельным либо с совместным рассогласованным управлением.
Работа электропривода происходит следующим образом. Сигнал задания скоростиVB подается с выхода задающего устройства 13 на вход регулятора скорости 4, где суммируется с сигналом отрицательной обратной связи по скорости Уд, в качестве которого используется выходное напряжение тахогенератора 3, соединенного с якорем двигателя 2. Выходное напряжение регулятора скорости 4 пропорционально заданному значению тока i ДВИ1ателя и является заданием на регуляторы тока 5 и 7. Максимальное значение защания тока ограничивается ограничителем 12. На входах интегрального 5 и пропорционального 7 регуляторов тока происходит сравнение заданного ij и действительного 1д значений тока двигателя. В качестве сигнала отрицательной обратной связи по току двигателя используется выходное напряжение датчика тока 8. Кроме того, на вход пропорционального регулятора тока 7 заведена жесткая положительная связь по ЭДС двигателя, формируемая датчиком ЭДС 9. При работе привода на
0 идеальном холостом ходу, когда ток двигателя равен нулю, напряжение на выходе пропорцинального регулятора 7 равно ЭДС двигателя (в относительных единицах). На выходе интегрального регулятора тока 5 установлен нелинейный элемент 6, компенсирующий нелинейность характеристики вентильного преобразователя . в зоне прерывистых токов, поэтому замкнутый контур тока линейный во всем диапазоне изменения тока преобразователя. Для точной компенсацин нелинейности вентильного преобразователя дополнительный вход нелинейного элемента 6 соединен с выходом датчика ЭДС 9, Для качественной работы привода при максимальных напряжениях преобразователя оба регулятора тока 5 и 7 и нелинейный элемент 6 охвачены ограничителем 11 углов управления вентилями.
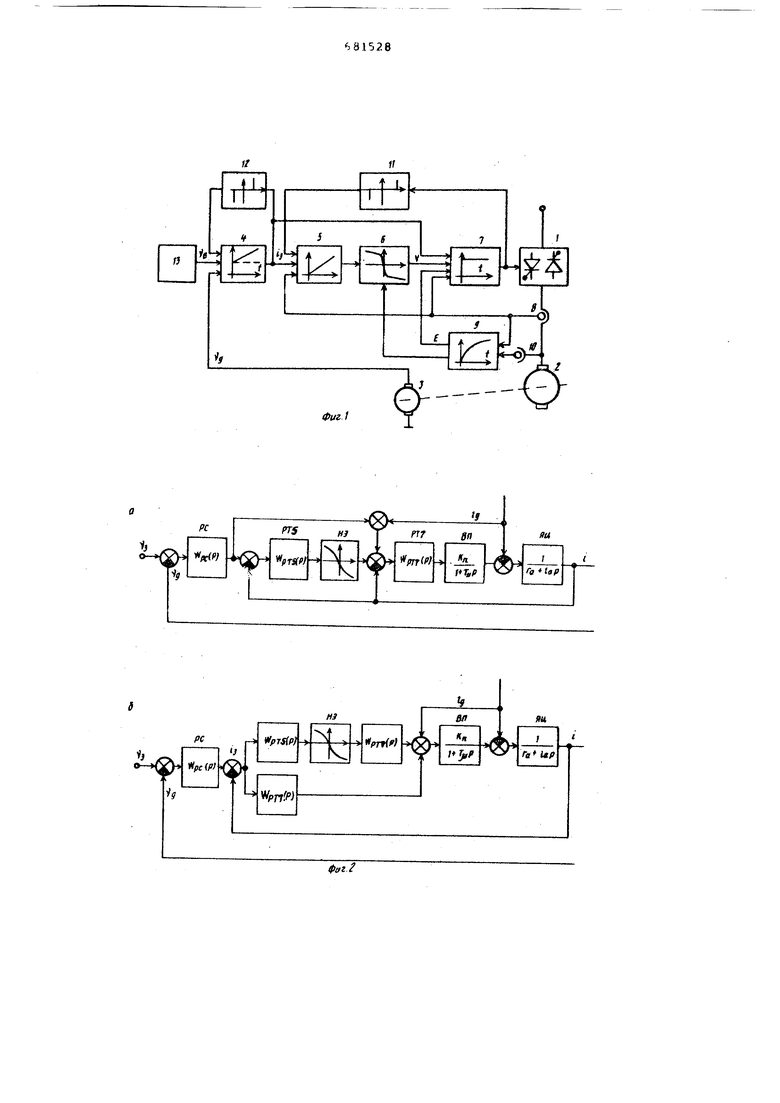
Для выяснения особенностей электропривода рассмотрим его структурную схему, приведенную на фиг.2а. Эта схема структурными преобразованиями приво,цится к виду, показанному на фиг.26. На выходе регулирующей части системы показан фильтр с постоянной времени Т. В реальных системах роль этого фильтра могут
0 выполнять фильтры Датчика тока и регуляторов, а при безынерционных элементах этот фильтр может быть реализован непосредственно на пропорциональном регуляторе тока 7 (в этом случае последний выполняется
в виде апериодического звена). Регулятор скорости 4 в зависимости от предъявляемых к электроприводу требований может быть применен И или-ПИ типа. Из фиг,2 видно, что в данной системе имеется два регулятора тока - пропорциональный (РТ7) и интегральный (РТ5), постоянная интегрирования которого меняет(ся при изменении режима работы преобразователя. Неизменность во всех режимах пропорциональной части и наличие изменяемой интегральной части регулятора тока является отличием электропривода от известного,
Если принять передаточные функции регуляторов тока в виде
Т
(5)
%Т7(Р -{ГТтГ7 (6)
то в режиме непрерывного тока, когда нелинейный элемент работает на пологом участке характеристики (см.фиг.З с единичным коэффициентом передачи, сумма
(7)
даст передаточную функцию (1) обычного пи-регулятора тока. Таким образом, в этом режиме обеспечивается стандартная настройка и оптимальные переходные процессы в приводе.
В режиме прерывистого тока эквивалентное споротивление преобразователя равно коэффициент передачи нелинейного элемента определяется (при любых величинах противо-ЭДС нагрузки) соотношением (2) и передаточная функция разомкнутого контура регулирования тока двигателя имеет вид:
(8)
«п -(
V .Р
который также соответствует виду передаточной функции оптимально настроенного контура. Частота среза ЛАЧХ.разомкнутого контура тока определяется выражением
(9)
с, 1
и не изменяете во всем диапазоне изменения тока вентильного преобразователя.
Таким образом, показатели электропривода не будут зависеть от того, с прерывистыми или с непрерывными токами работает вентильный преобразователь .
В отношении устойчивости к высокочастотным пульсациям и помехам электропривод не отличается от обычных электроприводов с системами подчиненного регулирования и имеет безусловные преимушества: на входе
нелинейного элемента в данном случае установлен интегральный регулятор тока с большой постоянной времени интегрирования Тд, который является для всех высокочастотных сигналов сильным фильтром. в известном электроприводе все помехи и пульсации усиливаются на участке нелинейного элемента с большим коэффициентом усиления и поступают на вход вентильного преобразователя.
Для тех электроприводов, где диапазон регулирования скорости ограничен, система регулирования может быть несколько упрощена: в этом случае может отсутствовать связь от измерителя ЭДС на дополнительный вход нелинейного элемента. При этом характеристика нелинейного элемента выбирается из условий обеспечения качественных процессов при максимально возможных ЭДС двигателя. Однако при малых ЭДС двигателя это приводит к ухудшению качества регулирования.
Если же к электроприводу предъявляются высокие требования к качеству регулирования в широком диапазоне скоростей, то характеристика нелинейного элемента должна изменяться в зависимости от ЭДС двигателя так, как указано на фиг.3. Без заметного ухудшения качества регулирования можно не менять наклон крутого участка характеристики нелинейного элемента, а менять при
5 изменении ЭДС двигателя лишь величину напряжения UQ. Кроме того, характеристику нелинейного элемента без заметного ухудшения качества регулирования можно аппроксимировать
0 ломаной линией из трех прямолинейных отрезков (см.фиг.3, показано пунктиром) .
На фиг. 4 приведена принципиальная схема одного из вариантов такого упрощенного исполнения нелинейного элемента. Он состоит из операционного усилителя 14 с входным резистором 15 и резисторами обратной связи 16 и 17, двух транзисторов 18 и 19, цепей смещения - резисторы 20-23 и диодного моста 24. При малых величинах выходного напряжения транзисторы 18 и 19 заперты и нелинейный элемент работает с большим коэффициентом усиления К, причем
(10)
N R
15
При увеличении входного напряжения до величины
пор
(11)
и. ел к
открывается транзистор 18 или 19 (в зависимости от полярности входного сигнала) и коэффициент усиления
нелинейного элемента уменьшается до величины К 2, причем
J
VV
R,
47
15
где r.f - сопротивление коллектор -
эмиттер в режиме насыщения
Для изменения характеристики не.линейного элемента в зависимости от ЭДС двигателя вход диодного моста 24 подключен к изолированному выход датчика ЭДС 9 (см,фиг.1). При ЭДС двигателя, равной нулю, , а при увеличении ЭДС двигателя Uj уменьшается, что приводит к изменению характеристик нелинейного элемента, как это показано (пунктиром) на фи г, 3 .
Нелинейный элемент для нереверсивного привода может быть выполнен нереверсивным, т,е, будет иметь одну ветвь характеристики. Для этого выход нелинейного элемента соединяют со своим входом с помощью диода, при этом можно исключить из схемы транзистор 18 или 19 (в зависимости от требуемой полярности выходного сигнала).
Для ограничения углов управления и напряжения вентильного преобразователя в системам подчиненного регулирования устанавливается нелинейный элемент в обратной связи регулятора тока. Аналогичная проблема возникает и в предлагаемом электроприводе. Однако здесь нельзя ограничение устанавливать только на одном регуляторе тока - пропорциональном или интегральном. Наиболее качест венное регулирование тока преобразователя при максимальном напряжении преобразователя будет осуществляться в электроприводе, если ограничитель углов управления включить так, как показано на фкг.1, охватывая ограничителем одновременно оба регулятора и нелинейный элегЗент
Предлагаекий электропривод был исследован на экспериментальной устновке во всем диапазоне скоростей с и и пи-регулятором скорости при набросе и сбросе нагрузки на валу, при набросе и сбросе сигналов задания скорости, при пусках, реверсах, тс можении электропривода от задатчика темпа (эадатчика интенсивности) . Во всех режимах в электроприводе обеспечивается высокое, близкое к оптимальному, качество регулирования скорости и тока двигателя и не клюется обычных для электроприводов с раздельным управлением
и режимом.прерывистых токов ограничений по быстродействию. По своим показателям такой электропривод
(12) практически (при современных системах логического переключения групп, обеспечивающих паузу в переключении групп не более 0,001С) не уступает электроприводу с преобразователем с совместным согласованным управлением, сохраняя все экономические преи.1ущества электропривО51а
0 с раздаг5ьны. управлением.
Форг.ула изобретения
1, Электропривод постоянного то5ка, содержащий вентильный преобразователь, ограничитель углов управления вентилямз, регулятор скорости, входы которого соединены с выходом задающего устройства и с датчиком
0 скорости, датчик тока, датчик ЭДС, нелинейный элемент и пропорциональный регулятор тока, первый вход которого соединен с выходом регулятора скорости, второй вход подключен
5 к выходу датчика тока, третий вход присоединен к выходу нелинейного элемента, выход пропорционального регулятора тока соединен со входом вентильного преобразователя и со
0 входом ограничителя углов управления вентилями, а выход датчика ЗДС подключен к дополнительному входу нелинейного элe 5eнтa и к четвертому входу пропорциокального регулятора тока,
5 отличающи и с я тe, что, с цеузью улучшения динамических и статических характеристик привода, дополнительно введен интегральный регулятор тока, первый вход которого
0 присоединен к выходу регулятора скорости, второй вход подключен к выходу датчика тока, а выход соединен со входом нелинейного элемента,
2. Электропривод по п,1, о т личающийся тем, что, с
5 целью получения высокого качества статических и динамических характернстик привода при максимальном напряжении преобразователя, выход ограничителя углов управления вентиля0ми соединен с третьим входом интегрального регулятора тока,
Источники информации, принятые ВО внимание при экспертизе
1. Журнал Technische Mitteilun-
5 gen AES-Telefunken, №6, 1969, с, 348-352,
-2. Динамика вентильного электропривода постоянного тока. Под ред. Поэ-днева А,Д. М,, Энергия, 1975,
0 с. 208-216.
Фиг1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Электропривод постоянного тока с двухзонной системой регулирования скорости | 1977 |
|
SU736319A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Электропривод с двухзонным регулированием скорости | 1983 |
|
SU1185516A1 |
| Электропривод постоянного тока | 1984 |
|
SU1358059A1 |
| Электропривод | 1978 |
|
SU769695A1 |
| Устройство для управления реверсивнымВЕНТильНыМ пРЕОбРАзОВАТЕлЕМ | 1977 |
|
SU809465A2 |
| Электропривод постоянного тока | 1990 |
|
SU1739467A1 |

нз
PC
ф.
ЯП
ва
