11
Изобретение относится к электро- технике, а именно к электроприводам пэстоянного тока, и может быть использовано в астатических по возмущающему воздействию системах регулирования.
Цель изобретения - увеличение быстродействия электропривода.
На чертеже представлена функцио- нальная схема электропривода.
Электропривод постоянного тока содержит электродвигатель 1 в виде электрической части 2 и. механической части 3, подключенный к вентиль- ному преобразователю 4, в цепь управления которого включены последовательно соединенные задатчик 5 скорости, пропорциональный регулятор 6 скорости и пропорционально-интеграль ный регулятор, 7 тока, выход которого связан с управляющим входом вентильного преобразователя 4, а также интегратор 8, инерционное звено 9 и датчик 10 скорости, подключен- ный к входу регулятора 6 скорости. Электропривод содержит также второе
инерционное звено 11, выход которого соединен с,входом пропорционально- интегрального регулятора 7 тока,, а вход подключен к выходу инерционного звена 9, соединенного своим входом с выходом пропорционально-интегрального регулятора 7 тока, а выходом - с входом интегратора 8, выход которого подкл очен к управляющему входу вентильного преобразователя 4.
Электропривод содержит также сумматоры 12 - 14, включенные на входах регулятора 6 скорости, регулятора 7 тока и вентильного преобразователя 4 соответственно, а также цепь 15, соединяющую выход регулятора 7 тока с входом вентильного преобразователя 4 .
Электропривод работает следующим образом.
Передаточные функции элементов электропривода соответствуют стандартным передаточным функциям двух- контурной однократноинтегрирующей системы подчиненного регулирования без учета влияния противоЭДС, т.е.
Р Т,
W
.(Р))
I+P т,
.
Р т,
W(p)
де Т,
К
/
рс Т., - электромагнитная и
электромеханическая постоянные времени соответственно ;
-сумма малых некомпенсированных постоянных времени5
-постоянная интегрирования регулятора тока якоря;
5 0 5
0
0
К
К
яг.
п
рс
5
R „ - суммарное сопротивление якорной цепи;
-постоянная электродвигателя;
-коэффициент усиления f вентильного преобразова теля;
-коэффициент усиления регулятора скорости.
(Цифровые индексы соответствуют порядковому номеру элемента на чертеже) .
Из теории систем с последовательной коррекцией известно, что с уче- |Том влияния противоЭДС электродвигателя передаточной функции регулятора тока якоря Wp (р) с компенс ацией ЭДС соответствует передаточная функция пропорционально-интегрального звена второго порядка
W,,(p) i±ET.iii2M . ,1
р т.т
в предлагаемом устройстве передаточная функция 1 пропорционально- интегрального регулятора тока второго порядка реализована элементами
14, 8, 9, 7 и цепью 15. .
Таким образом, в электропривод
45
введены звенья днями
с передаточными функ
W,(p)
W,(p)
1
КрТ,
В режиме пуска электропривода при работе регулятора скорости в насыщении напряжение на выходе инерционного звена 9 равно
W,
(„) У:л.(Е) , ilETN Р l+a,(UpT) К„
(2)
где (р) напряжение задания тока; К - передаточный коэффициент усиления обратной отрицательной связи по току.
В то же время сигнал на выходе электрической части 2 электродвига- теля, соответствующий динамическому току двигателя,определяется как
я АЙН
(р)Угт1). (3)
1+а.(1,рТ)
Оценка выражений 2 и 3 свидетельствует о том, что сигналы Uq(р) и 1ядцм(р) отличаются множителем (l+pT,;j)/(Kj,). Поэтому для вьщеле- ния сигнала, пропорционального динамическому току двигателя, достаточно ввести в схему управления электро- Q приводом второе инерционное звено 1 с передаточнойфункцией
т т / ч
pf- Тогда, сигнал на выходе звена 1I
тт f тт f Пзг (Е)/(КТ/КЛЕ) и „ (р)-и,(р) и„ (р) - r;-;f--7Kp-f;7)
(4)
25
30
пропорционален динамическому току якоря. С введением канала обратной связи с инерционным звеном 11 система управления электроприводом с пропорциональным регулятором скорости приобретает.свойства системы с аста- тизмом второго порядка, т.е. является астатической как по управляющему, так и по возмущающему со стороны нагрузки воздействиям.
При подаче сигнала задания скорости с выхода задатчика 5 скорости на первьй вход сумматора 12 на выходе регулятора 6 скорости появляется сигнал задания тока электродвигателя, поступающий на первый вход сумматора 13. При этом появляется сигна и на вых.оде пропорционально-интегрального регулятора 7 тока первого порядка. Этот сигнал поступает на вход инерционного звена 9 и одновременно по цепи 15 на второй вход сумматора 14. Сигнал, поступающий на вход инерционного звена 9, проходит через интегратор 8 и поступает на первый вход сумматора 14, в котором осуществляется суммирование двух сигналов сигнала, компенсирующего
Ю
Q
5
большую постоянную времени якорной цепи цепь 15, выход пропорционально-интегрального регулятора тока первого порядка и сигнала, компенсирующего влияние внутренней обратной связи по ЭДС электродвигателя, - сигнал с выхода интегратора 8. Как следствие, в напряжении на выходе вентильного преобразователя 4, подаваемом на вход электродвигателя I, будет иметь место дополнительная составляющая , компенсирующая для контура регулирования тока влияние внутренней связи по ЭДС электродвигателя. Приложенное к двигателю напряжения обеспечивает появление сигнала динамического тока на выходе электр1гчес- кой части -2 электродвигателя и сигнала скорости электродвигателя на выходе его механической части 3, Сигнал обратной отрицательной связи по скорости поступает в сл мматор 2, чем обеспечршается известны режим стабилизации скорости, С выхода первого инерционного звена 9 сигнал, кроме входа интегратора 8, поступает на вход второго инерционного звена 1 1 , на выходе которого вьщеляется сигнал, пропорциональный динамическому току якоря, поступающий на второй вход сумматора 13.
Таким образом, в предлагаемом устройстве управления электроприводом с выделением и применением сигнала, пропорционального динамическому току якоря, указанный сигнал выделяется непосредственно в прямом канале управления преобразователем, что исключает связь силовых цепей с цепями управления, и, следовательно, повышаI
ет помехозащищенность схемы управления в отношении помех, создаваемых преобразоваталем,
5
Применяемая схема включения пропорпионально-интегрального регулятора тока второго порядка позволяет выделить в прямом канале управления
П сигнал напряжения, содержащий форсирующую составляющЗгТо, компепсирую- щую инерционность тиристорного преобразователя, а обратная св.язь по динамической составляющей тока в ка нале управления преобразователе) за счет использования в контуре скорости пропорционального регулятора по- . вышает быстродействие контура скорое ти.
0
5
0
Несмотря на наличие форсирующей составляющей в прямом канале ления преобразователем, помехозащищенность системы не нарушается, поскольку связь силовой якорной цепи и контура регулирования тока отсутствует.
S
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, подключенный к вентильному преобразователю, в цепь управления которого вклю- чены последовательно соединенные за- датчик скорости, пропорциональньй регулятор скорости и пропорционально-интегральный регулятор тока, выход которого связан с упргизляющим входом вентильного преобразователя, а также интегратор, инерционное зйе- но и датчик скорости, подключенный к 1ВХОДУ регулятора скорости, о т - личающийся тем, что, с целью увеличения быстродействия; в него введено второе инерционное звено, выход которого соединен с входом пропорционально-интегрального регулятора тока, а вход подключен к выходу первого инерционного звена, соединенного своим входом с выходом пропорционально-интегрального регулятора тока, а выходом - с входом интегратора, выход которого подклю- чен к зт1равляющему входу вентильного преобразователя.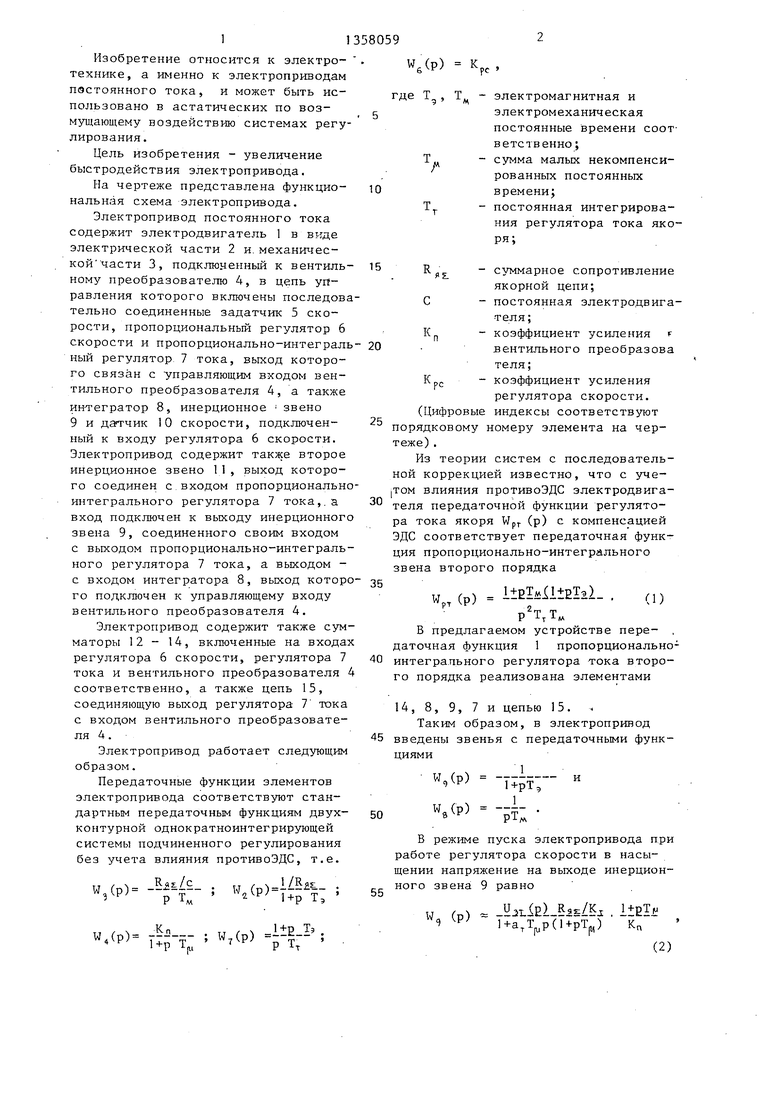

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1990 |
|
SU1786628A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1983 |
|
SU1181107A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2489798C1 |
| Электропривод с упругой механической связью между электродвигателем и механизмом | 1984 |
|
SU1277330A1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Датчик статической и динамической составляющих тока электродвигателя постоянного тока | 1981 |
|
SU945813A1 |
Изобретение относится к электротехнике и может быть использовано в астатических по возмущающему воздействию системах регулирования. Целью изобретения является увеличе ние быстродействия электропривода. Электропривод содержит второе инерционное звено 11, выход которого соединен, со входом ПИ-регулятора 7 тока, а вход подключен к выходу инерционного звена 9. Вход инерционного звена 9 соединен с выходом ПИ-регуля - тора 7 тока, а выход - с входом интегратора 8. Выход интегратора 8 подключен к управляющему входу . тильного преобразователя 4. В данном электроприводе, несмотря на наличие форсирующей составляющей в прямом канале з равления преобразователем, помехозащищенность системы не нарушается, т.к. связь силовой якорной цепи и контура регулирования тока отсутствует. 1 Ш1,
| ДАТЧИК СИГНАЛА, ПРОПОРЦИОНАЛЬНОГО ДИНАМИЧЕСКОЙ СОСТАВЛЯЮЩЕЙ ТОКА ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 0 |
|
SU167910A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шипилло В.П.Автоматизированный вентильный эх ектропривод | |||
| М.: Энергия, 1969, с.-240-243. | |||
