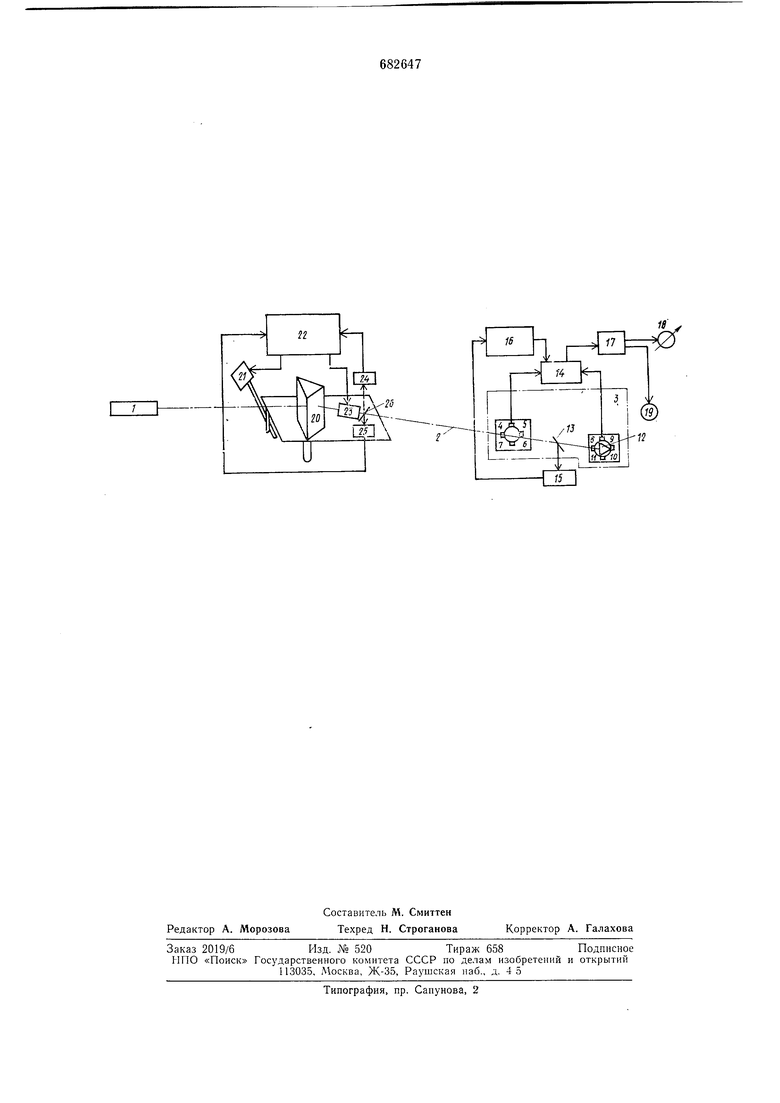
18 координат проходческого щита и индикатор 19 номеров включаемых гидродомкратов.
Между оптическим задатчиком направления 1 и проходческим щитом установлены зеркальная отклоняющая призма 20, кинематически соединенная с приводом 21 поворота, подключенным к одному выходу фазового лазерного дальномера 22, другой выход которого подключен к модулятору 23. На входы дальномера подключены выходы фотоприемников 24 и 25. На вход фотоприемника 24 поступает часть оптического луча, отраженного светоделительным зеркалом 26 от луча задатчика направления 1.
На вход фотоприемника 25 поступает часть оптического луча, отраженного светоделительным зеркалом 26 от луча, отраженного триппель-призмой 12.
Система управления движением проходческого щита работает следующим образом.
Оптический луч 2 отклоняется отклоняющей призмой 20, закрепленной в выработке, в соответствии с радиусом кривизны участка движения щита. Части прямого оптического луча, отраженного от триппельпризмы 12 светоделительным зеркалом 26, направляются на соответствующие входы лазерного дальномера 22. При этом используется фазовый способ, обеспечивающий необходимую точность измерения расстояния. Разность фаз сигналами фотоприемника 24 и фотоприемника 25 соответствует расстоянию до щита.
Сигнал с дальномера 22 поступает на привод 21 поворота, который осуществляет поворот зеркальной отклоняющей призмы 20 в функции пути в соответствии с кривизной проходимого щитом участка.
С выхода дальномера 22 подается также сигнал на модулятор 23, при помощи которого луч лазера 1 преобразуется в оптические сигналы определенной последовательности и длительности, пропорциональные измеренному расстоянию.
Фотоприемный блок 3 обеспечивает движение щита в направлении, заданном лучом 2. Для этого сигналы с фотоэлементов 4-7 и 8-11 поступают на измерительный блок 14, с которого через блок 17 индикации подаются сигналы управления на соответствующие гидродомкраты щита.
С помощью полупрозрачного зеркала 13 часть модулированного оптического луча 2, направляется на блок 15 передачи измеренного расстояния, где преобразуется в электрический сигнал, поступающий на нелинейный блок 16.
Блок 16 в функции пути вводит в измерительный блок 14 поправки, необходимые при проходке выработок, криволинейных в
вертикальной плоскости. При различных радиусах кривых устанавливается соответствующий коэффициент передачи нелинейного блока. Зависимость поправки от радиуса кривой является линейной функцией, поэтому постоянный коэффициент устанавливается на весь криволинейный участок.
Блок 15 передачи измеренного расстояния конструктивно представляет три последовательно соединенных элемента: фотодетектор, усилитель модулированного сигнала и демодулятор.
Оптический модулированный луч 2, отраженный полупрозрачным зеркалом 13, принимается фотодетектором, в котором преобразуется в электрический модулированный сигнал. Далее сигнал поступает на усилитель модулированного сигнала, где он усиливается. С усилителя сигнал поступает
на демодулятор, в котором происходит процесс выделения управляющего электрического сигнала из сигнала, подвергнутого модуляции.
В результате демодуляции на выходе
блока 15 передачи измеренного расстояния получается электрический сигнал, величина которого пропорциональна расстоянию, измеренному дальномером 22.
Формула изобретения
Система управления движением горной мащины, например, проходческого щита, содержащая оптический задатчик направления, модулятор, фотоприемный блок, измерительный блок, дальномер, привод поворота и блок индикации, отличающаяся тем, что, с целью повыщения точности и надежности управления на криволинейных участках движения, она снабжена зеркальной отклоняющей призмой, расположенной между оптическим задатчиком направления и проходческим щитом, полупрозрачным зеркалом, триппель-призмой, блоком передачи измеренного расстояния и нелинейным блоком, установленным на проходческом щите, причем зеркальная отклоняющая призма кинематически соединена с приводом поворота, подключенным к одному выходу дальномера, например, фазового лазерного дальномера, другой выход которого подключен к модулятору, а блок передачи измеренного расстояния взаимодействует с оптическим лучом, отраженным
полупрозрачным зеркалом, и через нелинейный блок электрически соединен с измерительным блоком.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 310111,.кл. G 01 С 7/00, 1969.
2. Авторское свидетельство СССР № 201936, кл. Н 02J 13/00, 1961.
«у
F4
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ СКАНЕРА ЗОНДОВОГО МИКРОСКОПА | 2015 |
|
RU2587686C1 |
| Система управления движением горной машины | 1975 |
|
SU899931A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1979 |
|
SU825939A1 |
| Интерферометр для измерения углов | 1990 |
|
SU1756757A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2007 |
|
RU2340871C1 |
| ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА СВЕТОВЫХ ВОЛН | 1996 |
|
RU2112210C1 |
| Интерферометр для контроля параметров оптических криволинейных вогнутых поверхностей | 1987 |
|
SU1516768A1 |
| Устройство для измерения отклонений от прямолинейности | 1990 |
|
SU1717957A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО НАБЛЮДЕНИЯ | 1997 |
|
RU2145433C1 |
| Фотоэлектрический датчик угла | 1980 |
|
SU968606A1 |