I
Изобретение относится к горной промышленности, в частности к устройствам дпя направленного вождения горнопроходческих машин.
Известно устройство направденного вождения горной машиной, движущейся по криволинейному участку, содержащее оптический зацатчик направления с приводом, матрицы с фотоэлементами, связанными с измерительным блоком, логический блок, блок дальномера , соединенный с приводом, и управляющий блок ll.
Однако известное устройство не обеспечивает необходимой точности .и надежности управления, так как- дальномер недостаточно точен и требует периодической переноски и установки. Кроме того, отсутствует устройство стабилизации ваправпения оптического пуча, а управляющий блок не обеспечивает требуемого .качества процесса регулирования.
Известна также система управления движейвем проходческого щита, содержащая оптический задатчик направления.
зеркальную отклоняющую призму с приводом и блоком управления приводом, матрицы с фотоэлементами, связанными с измерительным блоком, логический блок, нелинейный блок, блок измерения тфойденного расстояния и управляющий блок 2.
Указанная система не обеспечивает требуемой точности и надежности управления вз-за отсутствия контроля действительного поворота зеркальной отклоняющей призмы, неточности блока измерения пройденного расстояния и недостаточно высокого качества прсжесса регулирования, осуществляемого управляющим блоком.
Цель изобретения - повышение точности и надежности управления.
Поставленная цель достигается тем, что система снабжена фотоэлектрической следящей системой с шелевой диафрагмой и с датчиком перемещений, при этом блок измерения пройденного расстояния содержит индуктивный датчик, датчик
38
начапа цвижения, механизмы расцепления и перемещения, реле, выпрямитель, счетчик и сумматор пройденного расстояния, а управляющий бпок содержит цифференцирующий элемент, формирователь моцупя, блок умножения, сумматор и блок реле, причем фотоэлектрическая следящая система установлена между зеркальной, отклоняющей призмой и измерительным блоком и подключегга к блоку управления приводом зеркальной аризмы, второй вход которого соецинен с выходом блока измерения пройденного расстояния, в котором подвижная катушка индуктивного датчика через механизм расцепления, поцкпюченный к датчику начала движения, соединена с механизмом перемещения и подключена через реле и счетчик к сумматору пройденного расстояния, второй вход которого такясе подключен к индуктивному аатчику через выпрямитель, а в управляющем блоке выходы дифференцирующего элемента и формирователя модуля через блок умножения подключены к одному входу сумматора, другой вход которого и входы дифференцирующего элемента и формирователя модуля соединены с выходом логического блока, а выход сумматора подключен к бпоку реле.
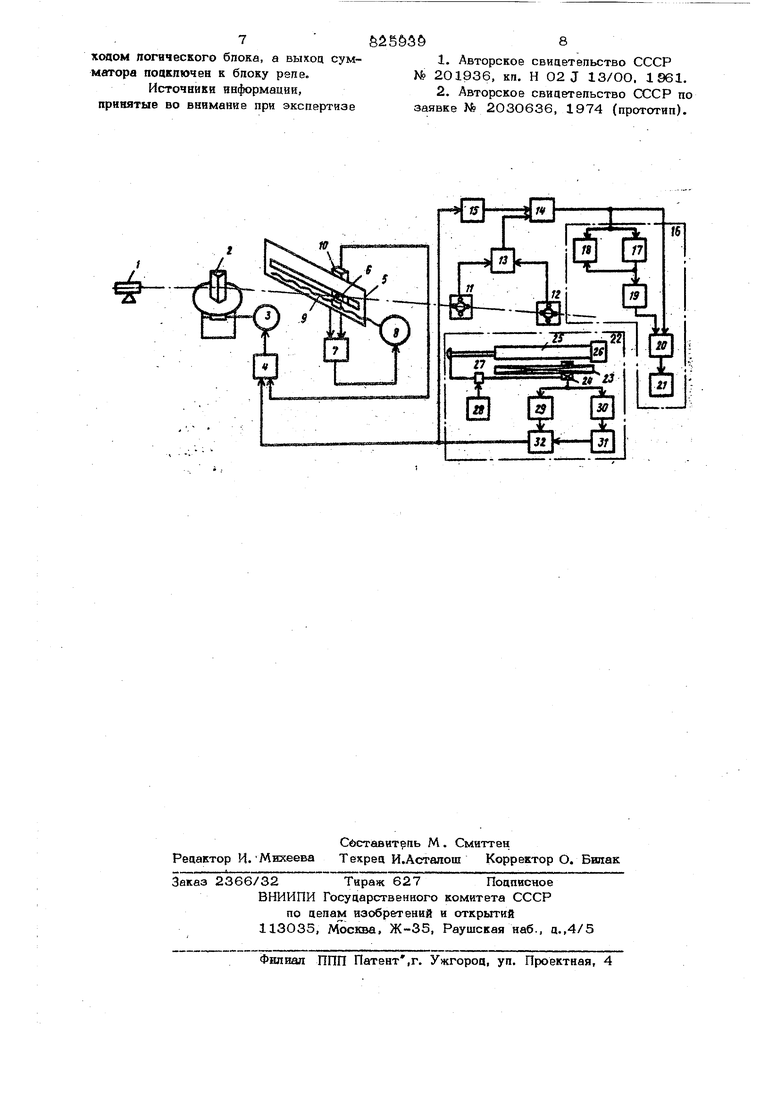
На чертеже приведена бпок-схема системы управления движением,проходческого щита.
Предлагаемая система состоит из за- датчика 1 направпения (лазера), оптически связанной с ним зеркапьной приз-мы 2 с приводом 3, соединенным с блоком 4 управления приводом, фотоэлектрической следящей системы с щелевой диафрагмой 5, снабженной матрицей 6 с фотоэлементами, установленной между зеркальной призмой и измерительным блоком и связанной с блоком 7 усилителей, с эпектродвигатепем 8, с винтовой передачей 9 и датчиком 10 перемещений, который соединен с бпоком 4 управления приводом и установлен как и все перечисленные, элементы на обделке ,тоннеля: матрицы с фотоэлементами 11 и 12, соединенными с измерительным блоком 13, выход которого связан с,логическим блоком 14, второй вход которого соединен с нелинейным блоком 15 а выход - с управляющим блоком 16, состоящим из дифференцирующего эпемен та 17 и формирователя 18 модуля, связанных с бпоком 19 умножения, который соединен с сумматором 2О, связанным с бпоком 21 репе; блока 22 измерения
9394
пройденного расстояния, снабженного индуктивным датчиком 23, подвижная катущка 24 которого связана со штоком механизма 25 перемещения с приводом
26 посредством электромагнитного механизма 27 расцепления, управляемого сигналом датчика 28 начала движения и соединяющего жестко подвижную катущку 24 с механизмом ее перемещения
только на время движения щита, что исключает накапливание ошибки за счет холостого хода и деформации обделки тоннепя; кроме того, блок 22 вкпючает выпрямитепь 29 и репе ЗО, соединенное
5 через счетчик 31 с сумматором 32 пройденного расстояния,
- Щелевая диафрагма 5 устанавпивается в вертикальной плоскости между зеркальной призмой и приемным устройством -и служит для стабилизации в вертикальной плоскости и контроля положения луча Б горизонтальной плоскости.
Предлагаемая система работает следующим образом.
С помощью пуча лазера 1 задается нужное направление движения. Луч, проходя через зеркальную призму 2 и отверстия в матрице 6 щелевой диафрагмы 5, поступает на матрицы с фотоэлементами 11 и 12, которые с измерительным блоком 13 осуществляют измерение координат двух точек оси щита. С измерительного бпока сигнал через логический блок 14 поступает на управляющий блок 16. В управляющем блоке 16 происходит дифференцирование сигнала дифференцирующим эле1иентом 17, определение его модупя формироват,елем 18, перемножение модуля и производной блоком 19 умножения и спожение с основным сигналом в сумматоре 20. Затем сигнал поступает в блок 21 репе, который включает гицро- домкраты передвижения щита.
Таким образом, лри формировании управляющего воздействия учитываются откпонения проходческого щита в плане и профиле X , которые форсируются (ускоряются) за счет произведения модуля отклонений на производную d X МЬ .
Алгоритм управления имеет вид ,|xlK.
в качестве механизма 25 перемещения можно использовать винтовой или гидравлический домкрат с ходом штока более 1 м, так как для установки одного кольца обделки тоннеля щит должен переместиться на 1 м. Головка штока механизма перемешения упирается в торцовую часть обдепки тоннеля. Сигнал инцуктивного датчика 23, пропоршаональный величине перемещения щита, поступает на выпрямитель 29 и репе ЗО, которое включается при перемещении шита на один метр. Счетчик 31 отсчитывает в метрах расстояние, пройденное щитом, которое в сумматоре 32 складывается с расстоянием в миллиметрах (сантиметрах), поступающим с датчика через выпрямитель 29. Таким образом, в процессе циклической передвижки щита с требуемой точностью определяется прой денное им расстояние. В функции пройденного щитом расстояния производится поворот пуча в горизонтальной плоскости призмой 2 посредством привода 3, и одновременно автоматически вводится поправка в измерения координат хвостовой точки оси щита с помошью нелинейного блока 15. Сигнал на управление приводом 3 поступает с блока 22 измерения пройденного расстояния через блок 4 управления приводом. В вертикальной плоскости поворот луча не производится, так как радиусы кривых более 3000 м, поэтому достаточно только автоматического введения поправок в измерения вертикальных координат от щита блоком 15 в функции пути. При повороте луча зеркальной призмой 2 посредством электродвигателя 8 и винтовой передачи 9 перемещается матрица б с фотоэлементами. Датчик 10 перемещений, измеряя перемещение матрицы 6, измеряет угол поворота луча. Сигнал с датчика 1О поступает в блок 4 управп - кия приводом, где сравнивается с сигналом, поступающим с блока 22 измерения пройденного расстояния, и разность сигна лов поступает на управление приводом 3. Таким образом, диафрагма 5, расположен ная на расстоянии 5-15 м от зеркальной призмы 2, кроме стабилизации положения йуча позволяет измерять угол поворота луча с высокой точностью. Предлагаемое устройство обеспечивает прохождение криволинейных участков тоннеля от 50 до 10О м при радиусах кривых 3001200 м соответственно. Для проходки следующего участка отключается привод 3 зеркальной призмы 2, диафрагма 5 с блоком 4 управления приводом переносится на другое место. Устанавливается еще одно устройство отклонения луча, состоящее из зеркальной призмы 2 с приводом 3, к которому подключается перемененный блок .4 управления и т.д. до прямолинейного участка или предела чувствительности приемного блока устройства. Применение предлагаемого устройства позволяет автоматизировать процесс управления направленным движением проходческого щита, что повышает производительность труда, улучшает условия и безопасность работы обслуживающего персонала. Формула изобретения Система управления движением проходческого щита, содержащая оптический задатчик направления, зеркальную отклоняющую призму с приводом и блоком управления приводом, матрицы с фотоэлементами/ связанными с измерительным бло ком,логнческий блок, нелинейный блок, блок измерения пройденного расстояния и управляющий блок,отличающаяс я тем,что,с целью повышения точности и надежности управления, она снабжена фотоэлектрической следящей системой с щелевой диафрагмой и с датчиком перемещений, при этом блок измерения пройденного расстояния содержит индуктивный датчик, датчик начала движения, механизмы расцепления и перемещения, реле, выпрямитель, счетчик и сумматор пройденного расстояния, а управляющий блок содержит дифференцирующий элемент, формирователь модуля, блок умножения, сумматор и блок репе, причем фотоэлектрическая слвдящяя система установлена между зеркальной отклоняющей призмой и измерительным блоком и подключена к блоку управления приводом зеркальной призмы, второй вход которого соединен с выходом блока измерения пройденного расстояния, в котором подвижная катушка индуктивного датчика через механизм расцепления, подключенный к датчику начала движения, соединена с механизмом перемещения и подключена через реле и счетчик к сумматору пройденного расстояния, второй вход которого подключен к индуктивному датчику через выпрямитель, а в управляющем блоке выходы дифференцирующего элемента и формирователя модуля через блок умножения подключены к одному входу сумматора, другой вход которого и входы дифференцирующего элемента н формирователя модуля соединены с выходом логического блока, а выход сумматора поакпючен к блоку репе,
Источники информации, принятые во внимание при экспертизе
1.Авторское свиаетепьство СССР № 201936, кп. Н 02 J 13/ОО. 1961.
2.Авторское свиаетепьство СССР по заявке № 203О636, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| Система управления движением горной машины | 1974 |
|
SU682647A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Датчик уклона землеройной машины | 1986 |
|
SU1812426A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ И ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1992 |
|
RU2054626C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНОГО РАЗМЕРА ДЕТАЛИ | 1990 |
|
RU2047091C1 |
