I
Изобретение относится к горной промышленности, а именно, Для автоматизации процессов проведения горных выработок, преимушественнана криволинейных их участках.
Известна система управления движением горной машины, содержащая оптический задатчик направления, модулятор, фотоприемный блок, пассивные отклоняющие элементы, дальномер, привод поворота, измерительный блок и блок индикации 1 .
Недостатками этой системы являются низкая ее надежность и малая дальность действия.
Известна также система управления движением горной машины, содержащая лазерный задатчик направления с модулятором, пассивные отклоняющие элементы, фотоприемный блок, установленный на машине, активный отклоняющий э пемент, включающий светодальномер, соединенный с нелинейным блоком 2.
Однако известная система не обеспечивает высокой точности при увеличении дальности управления.
Цель изобретения - повыщение точности управления при одновременном увеличеНИИ расстояния от задатчика направления до горной машины.
Поставленная цель достигается тем, что активный отклоняющий элемент дополнительно снабжен зеркальным шлейфовым гальванометром, отражательной призмой, электронным коммутатором, блоком поиска, сигнальным генератором, блоком управления, сумматором, задатчиком максимального расстояния и вторым модулятором и установлен между машиной и последним пассивным отклоняющим элементом, причем фотоприемный блок оптически связан с задатчиком направления через отражательную призму и зеркальный шлейфовый гальванометр, электрический вход которого через электронный коммутатор соединен с блоком поиска и нелинейным блоком, а электрон . ный коммутатор соединен со светодальномером, вход которого через сумматор, блок управлення и сигнальный генератор подключен ко второму модулятору.
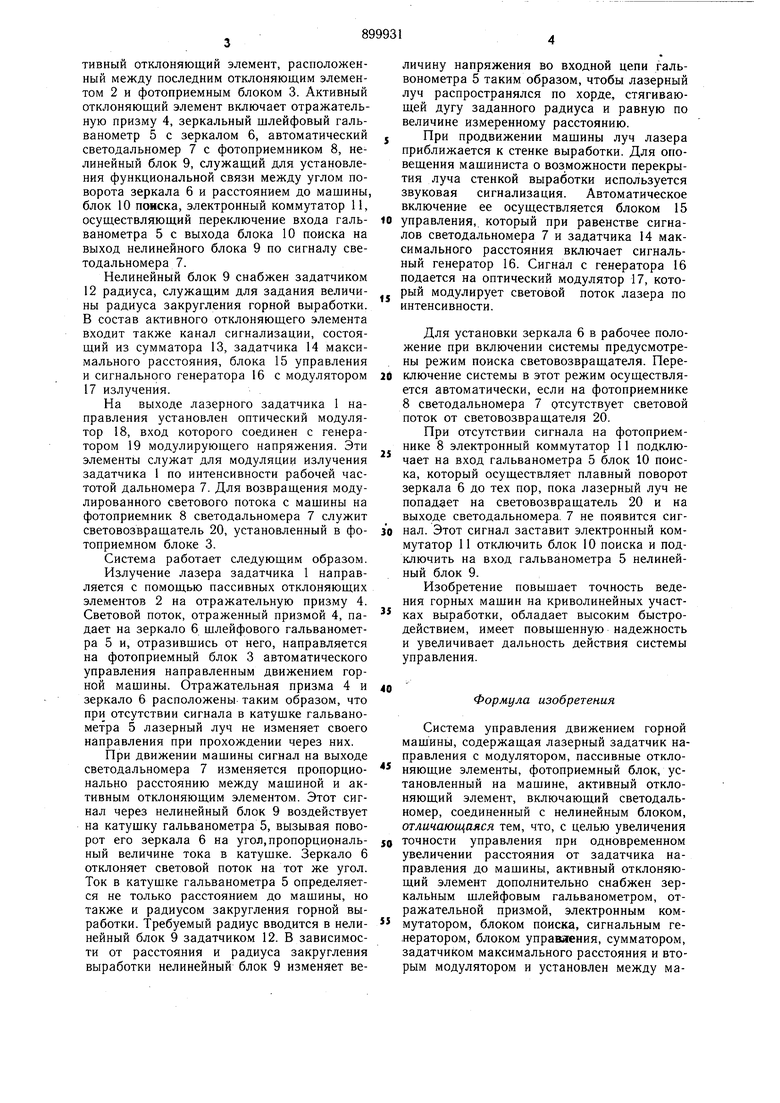
На чертеже показана блок-схема.
Система содержит задатчик 1 направления, пассивные оптические отклоняющие элементы 2, установленные в выработке на определенном расстоянии друг от друга, активный отклоняющий элемент, расположенный между последним отклоняющим элементом 2 и фотоприемным блоком 3. Активный отклоняющий элемент включает отражательную призму 4, зеркальный щлейфовый гальванометр 5 с зеркалом 6, автоматический светодальномер 7 с фотоприемником 8, нелинейный блок 9, служащий для установления функциональной связи между углом поворота зеркала 6 и расстоянием до мащины, блок 10 поиска, электронный коммутатор 11, осуществляющий переключение входа гальванометра 5 с выхода блока 10 поиска на выход нелинейного блока 9 по сигналу светодальномера 7.
Нелинейный блок 9 снабжен задатчиком 12 радиуса, служащим для задания величины радиуса закругления горной выработки. В состав активного отклоняющего элемента входит также канал сигнализации, состоящий из сумматора 13, задатчика 14 максимального расстояния, блока 15 управления и сигнального генератора 16 с модулятором 17 излучения.
На выходе лазерного задатчика 1 направления установлен оптический модулятор 18, вход которого соединен с генератором 19 модулирующего напряжения. Эти элементы служат для модуляции излучения задатчика 1 по интенсивности рабочей частотой дальномера 7. Для возвращения модулированного светового потока с мащины на фотоприемник 8 светодальномера 7 служит световозвращатель 20, установленный в фотоприемном блоке 3.
Система работает следующим образом.
Излучение лазера задатчика 1 направляется с помощью пассивных отклоняющих элементов 2 на отражательную призму 4. Световой поток, отраженный призмой 4, падает на зеркало 6 щлейфового гальванометра 5 и, отразивщись от него, направляется на фотоприемный блок 3 автоматического управления направленным движением горной мащины. Отражательная призма 4 и зеркало 6 расположены таким образом, что при отсутствии сигнала в катущке гальванометра 5 лазерный луч не изменяет своего направления при прохождении через них.
При движении машины сигнал на выходе светодальномера 7 изменяется пропорционально расстоянию между мащиной и активным отклоняющим элементом. Этот сигнал через нелинейный блок 9 воздействует на катушку гальванометра 5, вызывая поворот его зеркала 6 на уго.л, пропорциональный величине тока в катушке. Зеркало 6 отклоняет световой поток на тот же угол. Ток в катущке гальванометра 5 определяется не только расстоянием до машины, но также и радиусом закругления горной выработки. Требуемый радиус вводится в нелинейный блок 9 задатчиком 12. В зависимости от расстояния и радиуса закругления выработки нелинейный блок 9 изменяет величину напряжения во входной цепи гальвонометра 5 таким образом, чтобы лазерный луч распространялся по хорде, стягивающей дугу заданного радиуса и равную по величине измеренному расстоянию.
При продвижении мащины луч лазера приближается к стенке выработки. Для оповещения мащиниста о возможности перекрытия луча стенкой выработки используется звуковая сигнализация. Автоматическое включение ее осуществляется блоком 15
0 управления,, который при равенстве сигналов светодальномера 7 и задатчика 14 максимального расстояния включает сигнальный генератор 16. Сигнал с генератора 16 подается на оптический модулятор 17, который модулирует световой поток лазера по интенсивности.
Для установки зеркала 6 в рабочее положение при включении системы предусмотрены режим поиска световозвращателя. Переключение системы в этот режим осуществляется автоматически, если на фотоприемнике 8 светодальномера 7 отсутствует световой поток от световозвращателя 20.
При отсутствии сигнала на фотоприемнике 8 электронный коммутатор 11 подключает на вход гальванометра 5 блок 10 поиска, который осуществляет плавный поворот зеркала 6 до тех пор, пока лазерный луч не попад ает на световозвращатель 20 и на выходе светодальномера. 7 не появится сигнал. Этот сигнал заставит электронный коммутатор 11 отключить блок 10 поиска и подключить на вход гальванометра 5 нелинейный блок 9.
Изобретение повышает точность ведения горных мащин на криволинейных участках выработки, обладает высоким быстродействием, имеет повыщенную надежность и увеличивает дальность действия системы управления.
Формула изобретения
Система управления движением горной машины, содержащая лазерный задатчик направления с модулятором, пассивные отклоняющие элементы, фотоприемный блок, установленный на машине, активный отклоняющий элемент, включающий светодальномер, соединенный с нелинейным блоком, отличающаяся тем, что, с целью увеличения
точности управления при одновременном увеличении расстояния от задатчика направления до мащины, активный отклоняющий элемент дополнительно снабжен зеркальным щлейфовым гальванометром, отражательной призмой, электронным коммутатором, блоком поиска, сигнальным генератором, блоком управления, сумматором, задатчиком максимального расстояния и вторым модулятором и установлен между машиной и последним пассивным отклоняющим элементом, причем фотоприемный блок оптически связан с задатчиком направления через отражательную призму и зеркальный шлейфовый гальванометр, электрический вход которого через электронный коммутатор соединен с блоком поиска и нелинейным блоком, а электронный коммутатор соединен со светодальномером, выход которого через последовательно соединенные
сумматор, блок управления и сигнальный генератор подключен ко второму модулятоРУИсточники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 201936, кл. Е 02 С 9/20, 1961.
2.Авторское свидетельство СССР
№ 682647, кл. Е 21 С 35/24, 1974 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением горной машины | 1974 |
|
SU682647A1 |
| ФАЗОВЫЙ СВЕТОДАЛЬНОМЕР | 1998 |
|
RU2139498C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| КОМБИНИРОВАННЫЙ ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2008 |
|
RU2375665C2 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2011 |
|
RU2464601C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МИНИ-ЩИТА ДЛЯ СТРОИТЕЛЬСТВА МИНИ-ТОННЕЛЕЙ | 2009 |
|
RU2405937C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Лазерный фазовый дальномер | 2015 |
|
RU2610514C2 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
