грешностей типа «люфт только в самой зубчатой передаче, входящей в устройство.
Целью изобретения является ускорение процесса коррекции движения ведомого звена.
Указанная цель достигается тем, что в момент смены направления движения ведущего звена изменяют передаточное отношение в кинематической цепи на время внесения коррекции. Для осуществления этого способа предложено устройство, содержащее ведущий и ведомый валы, кинематически связанные зубчатой передачей. Устройство снабжено также жестко закрепленным на ведущем валу сектором с кулачком, двуплечим рычажным фиксатором, одно плечо которого взаимодействует с сектором, зубчатым стопором, с которым взаимодействует второе плечо фиксатора, рычагом, установленным на ведущем валу с возможностью перемещения его по дуге сектора и имеющим выступ, взаимодействующий с первым плечом фиксатора. Зубчатая передача выполнена планетарной с двумя центральными колесами, жестко закрепленными на ведущем и ведомом валах, установленным на ведомом валу водилом и двумя сателлитами, взаимодействующими с центральными колесами и закрепленными на одной оси, жестко соединенной с водилом, в секторе выполнен дуговой паз, -,. Который входит конец оси сателлитов, а Ь.сь качания рычажного фиксатора размещена на водиле.
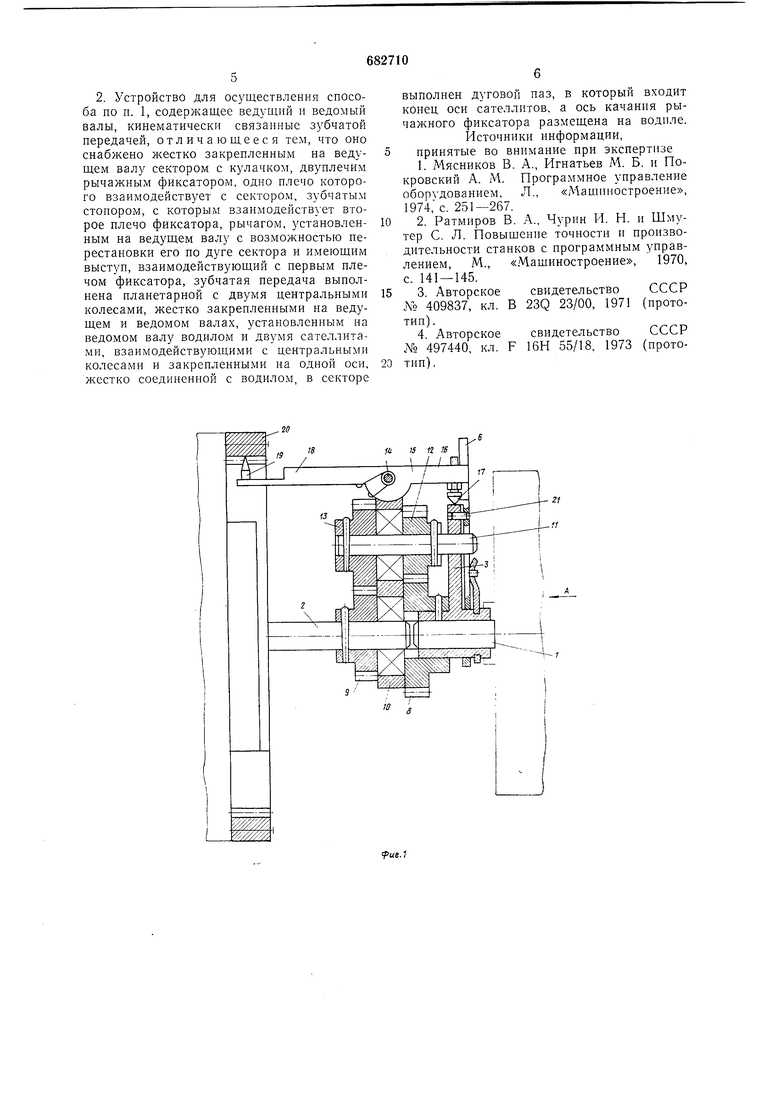
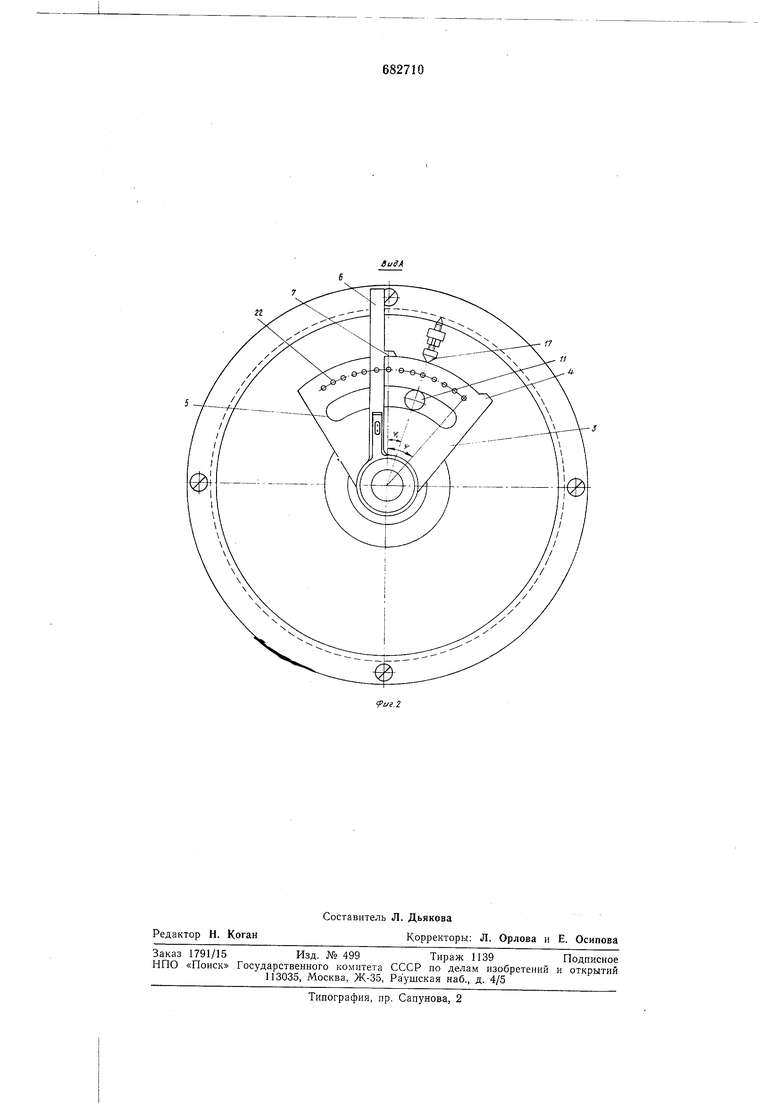
На фиг. 1 изображено устройство для осуществления способа компенсации погрещностей типа «люфт, поперечный разрез; на фиг. 2 - вид «А на фиг. 1.
Устройство содержит ведущий 1 и ведомый 2 валы, жестко закрепленный на ведущем валу сектор 3 с кулачком 4 и дуговым пазом 5, установленный на ведущем валу рычаг 6 с выступом 7, планетарную зубчатую передачу с центральным зубчатым колесом 8, закрепленным на ведущем валу, центральным колесом 9, закрепленным на ведомом валу, установленным на ведомом валу на подшипнике водилом 10 с закрепленной на нем осью 11, несущей сателлиты 12 и 13. На водиле 10 на оси 14 установлен двунлечий рычажный фиксатор 15, на одном плече 16 которого смонтирован скользящий упор 17, опирающийся на сектор 3, а на втором плече 18-зуб 19, входящий во впадины неподвижного зубчатого стопора 20. Конец оси 11 сателлитов входит в дуговой паз 5 сектора 3.
Осуществление способа компенсации погрещностей типа «люфт с помощью описываемого устройства происходит следующим образом.
При вращении ведущего вала 1 по часовой стрелке получает вращение сектор 3. Водило 10 в это время неподвижно, так как зуб 19 входит во впадины зубчатого
стопора 20. Вместе с валом 1 вращается колесо 8 и передает вращение сателлитам 12, 13 и колесу 9, при этом ведомый вал 2 поворачивается на угол ф2, равный (fi-i, где ф1 - угол поворота ведущего вала, i - передаточное отношение зубчатой передачи. После поворота вала 1 с сектором 3 на угол ф1 выступ 7 рычага 6 воздействует через упор 17 на плечо 16 фиксатора
15 и выводит зуб 19 из впадины стопора 20. Рычаг 6 з-пирается в этот момент в ось 11 сателлитов и увлекает водило 10. Вращение сателлитов 12 и 13 с осью 11 прекращается, так как в этот момент передаточное отнощение равно 1. Это положение
сохраняется до момента реверса вращения.
При вращении вала 1 против часовой
стрелки упор 17 сходит с выступа 7, зуб 19
западает во впадину стопора 20 и водило
10 оказывается застопоренным фиксатором 15. Вращение от вала 1 валу 2 передается с передаточным отношением i, учитывающим поправку на люфт. После поворота вала 1 и сектора 3 на угол 1(з, кулачок 4
приподпимает упор 17, и водило 10 освобождается. Дальнейшее вращение от вала 1 к валу 2 осуществляется с передаточным отношением, равным 1. Ведомый вал 2 после реверса поворачивается на угол
.
Величина коррекции будет равна AiJ3 ij) i|5i(i-1). Таким образом, величина коррекции зависит от передаточного отношения и угла ij)i, т. е. от расстояния межДУ кулачком 4 и выступом 7, которое регулируется перестановкой штифта 21, закрепленного на рычаге 6, в отверстиях 22, выполненных в секторе 3. С помощью описываемого устройства может быть внесена
коррекция, компенсирующая люфт «с избытком. Тем самым можно частично компенсировать погрешности, возникающие при деформации системы СПИД.
Применение описанного способа и устройства позволяет существенно повысить точность и производнтительность обработки на станках с ЧПУ за счет ускорения процесса внесения поправки на «люфт, а также ликвидации необходимости пересоставления программы по результатам обмера первой пробной детали.
Формула изобретения
1. Способ компенсации погрешностей типа «люфт в кинематической цепи между ведущим и ведомым звеньями, заключающийся в том, что ведомому звену сообщают дополнительное перемещение, отличающ и и с я тем, что, с целью ускорения процесса коррекции движения ведомого звена, в момент смены направления движения ведущего звена изменяют передаточное отношение в кинематической цепи на время
внесения коррекции.
2. Устройство для осуществления способа по п. 1, содержаш,ее ведущий н ведомый валы, кинематически связанные зубчатой передачей, отличающееся тем, что оно снабжено жестко закрепленным на ведущем валу сектором с кулачком, двуплечим рычажным фиксатором, одно плечо которого взаимодействует с сектором, зубчатым стопором, с которым взаимодейств ет второе плечо фиксатора, рычагом, установленным на ведущем валу с возможностью перестановки его по дуге сектора и имеющим выступ, взаимодействующий с первым плечом фиксатора, зубчатая передача выполнена планетарной с двумя центральными колесами, жестко закрепленными на ведущем и ведомом валах, установленным на ведомом валу водилом и двумя сателлитами, взаимодействующими с центральными колесами и закрепленными на одной оси, жестко соединенной с водилом, в секторе
выполнен дуговой паз, в который входит конец оси сателлитов, а ось качания рычажного фиксатора размещена на воднле.
Источники информации, принятые во внимание при экспертизе
1. Мясников В. А., Игнатьев Mi. Б. и Покровский А. М. Программное управление оборудованием. Л., «Машиностроение, 1974, с. 251-267.
2. Ратмиров В. А., Чурин И. Н. и Шмутер С. Л. Повыщение точности и производительности станков с программным управлением, М., «Машиностроение, 1970, с. 141 - 145.
3. Авторское свидетельство СССР Л 409837, кл. В 23Q 23/00, 1971 (прототип).
4. Авторское свидетельство СССР № 497440, кл. F 16Н 55/18, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБЧАТАЯ МУФТА СВОБОДНОГО ХОДА | 1980 |
|
SU1061563A1 |
| РАЗДАТОЧНАЯ КОРОБКА ТРАНСПОРТНОГО СРЕДСТВА С МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2011 |
|
RU2462372C1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| ЗУБЧАТО-ЦЕВОЧНЫЙ ШАГОВЫЙ ПРИВОД С МЕХАНИЧЕСКИМ ПОБУЖДЕНИЕМ И НУЛЕВЫМ ОБРАТНЫМ УСИЛИЕМ | 2016 |
|
RU2641563C2 |
| ЗУБЧАТАЯ МУФТА СВОБОДНОГО ХОДА Э.К.КОРОТКОВА | 1980 |
|
SU1064714A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Планетарный зубчатый привод стеклоочистителя | 2023 |
|
RU2815138C1 |
| РЕГУЛИРУЕМАЯ ПЕРЕДАЧА | 2000 |
|
RU2181451C2 |
| МНОГОСКОРОСТНОЙ БЕССТУПЕНЧАТЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2048365C1 |
гг.
5
