Колесами предьздущего шарнира и ведущими зубчать1ми колесами последующего шарнира, причем два периферийных входных сателлита трехзвенного дифференциального механизма жестко посажены на трубчатые отростки силовых водил трехзвенного дифференциального механизма последующего шарнира.


| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| Шарнир манипулятора | 1984 |
|
SU1189678A1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| Транспортно-тяговое средство | 1989 |
|
SU1671483A1 |
| МНОГОДИАПАЗОННАЯ ТРЕХПОТОЧНАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ НА ОСНОВЕ ДВУХ ДИФФЕРЕНЦИАЛЬНЫХ МЕХАНИЗМОВ | 2013 |
|
RU2555583C2 |
| Двухпоточная бесступенчатая коробка передач | 1981 |
|
SU1229483A1 |
1. МАНИПУЛЯТОР, содержащий шарнирно-рычажный исполнительньй орган с подвижными звеньями, сочлененными одно с другим и с неподвижным основанием двуосными шарнирами, причем звенья выполнены в виде полых цилиндров с концентрически расположенными внутри трубчатыми валами, на концах которых жестко закреплены ведомые и ведущие зубчатые колеса трехзвенных дифференциальных механизмов, а сателлиты этих трехзвенных Дифференциальных механизмов расположены в корпусах шарниров по их осям и равномерно распределены относительно продольных осей звеньев, причем периферийные сателлиты жестко посажены на трубчатые отростки силовых .водил, сочленякшщх корпуса шарниров и приводы подвижных звеньев с выходными валами, установленные на неподвижном основании и кинематически связанные с соответствующими входными зубчатыми колесами исполнительного органа, отличающийся тем, что, с целью кинематической развязки движений и уменьшения мощности приводов, он снабжен двумя дополнительными коническими дифференциалами и суммирующей зубчатой передачей, причем корпуса подвижных звеньев вьшолнены в виде тройников, а двуосные шарниры развернуты один относительно другого на 90,при этом кинематические ветки силовых водил трехзвенных дифференциальных механизмов каждого двуосного шарнира замкнуты парами зуб-чатых шестерен суммирующей конической передачи,одна из которых находится в зацеплении с соответствую1Щ1м зубчатым колесом водила одного из двух дополнительных конических дифференциалов, первые входные зубчатые колеса которых жестко насажены на выходной вал (Л. первого привода, а вторые через сутмируинцую зубчатую передачу кинемас тически связаны с вторым приводом. 2. Манипулятор по п.1, отличающийся тем, что, с целью повьш1ения маневренности, он снабжен зубчатыми секторами, а каждое подвижное звено вьлолнено в виде кресСП товины, на которой жестко закреплены NBA зубчатые секторы, расположенные по.4 парно во взаимно перпендикулярных сл плоскостях, и сцепленных с зубчатыми со секторами корпусов предьщущего и последукяцего звеньев, а внутри крестовины по двум взаимно перпендикулярHbw ее осям равномерно справа и слева от продольных осей звеньев располо жены входные и выходные сателлиты трехзвенных дифференциальных механизмов, которые трубчатыми валами, концентрически расположенными по осям крестовины, жестко сочленены соответственно с ведомыми зубчатыми
Изобретение относится к манипуляторостроению и может быть использовано а качестве исполнительных органов манипуляторов и роботов.
Известен маютулятор, содержащий шарнирно-рь чажШ)й исполнительный орган с подвижными звеньями, сочлененными одно с другим и с неподвижным основанием двуосными шарнирами, причем звенья вьшолнены в виде полых цилиндров С концентрически расположенными внутри трубчатыми валами, на концах которых жестко закреплены ведомые и ведзщие зубчатые колеса трехзвенных дифференциальных механизмов, а сателлиты этих трехзвенных дифференциальных механизмов расположены в корпусах шарниров по их осям и равномерно распределены относ 1тельно продольных осей звеньев, причем периферийные сателлиты жестко посажены на трубчатые отростки силовых водил, сочленяющих корпуса шарниров и приводы подвижных звеньев с выходными валами, установленные на неподвижном основании и кинематически связанные с соответствукяцими входными зубчатыми колесами испапннтельйого органа ft}
Недостатками известного устройства являются взаимное влияние кинематических движений звеньев и большая энергоемкость приводов.
Цель изобретения - обеспечение кинематической развязки движений и
уменьшение мощности приводов.
Цель достигается тем, что манипулятор, содержащий шарнирно-рычажный исполнительный орган с подвижными звеньями, сочлененными одно с другим и с неподвижным основанием двуосными шарнирами, причем звенья выполнены в виде полых цилиндров с концентрически расположенными внутри трубчатыми валами, на концах которыхжест:КО закреплены ведомые и ведущие зубчатые колеса трехзвенньк дифференциапьных механизмов, а сателлиты этих трехзвенных дифференциальных механизмов расположены в корпусах шарниров ; по их осям и равномерно распределены относительно продольных осей звеньев, причем периферийные сателлиты жестко посажены на трубчатые отростки силовьк водил, сочленяющих корпуса пшрниров и приводы подвижных звеньев с выходными валами, установленные на неподвижном основании и кинематически связанные с соответствукяцими входными зубчатыми колесами исполнительного органа, снабжен двумя дополнительными коническими дифференциалами и суммиругацей зубчатой передачей, причем корпуса подвижных звеньев выполнены в виде тройников, а двуосные шарниры развернуты один относительно другого на 90, при этом кинематические ветки силовых водил трехзвенных дифференциальных механизмов казкдого двуосного шарнира замкнуты парами зубчатых шестерен суммирукяцей конической передачи, одна из которых находится в зацеплении с соответствукщим зубчатым колесом водила одного из двух дополнительных конических дифференциалов, первые входные зубчатые колеса которьж жестко насажены на вькодной вал первого привода, а вторые чербз суммирукщую зубчатую передачу кинематически связаны с вторым приводом.
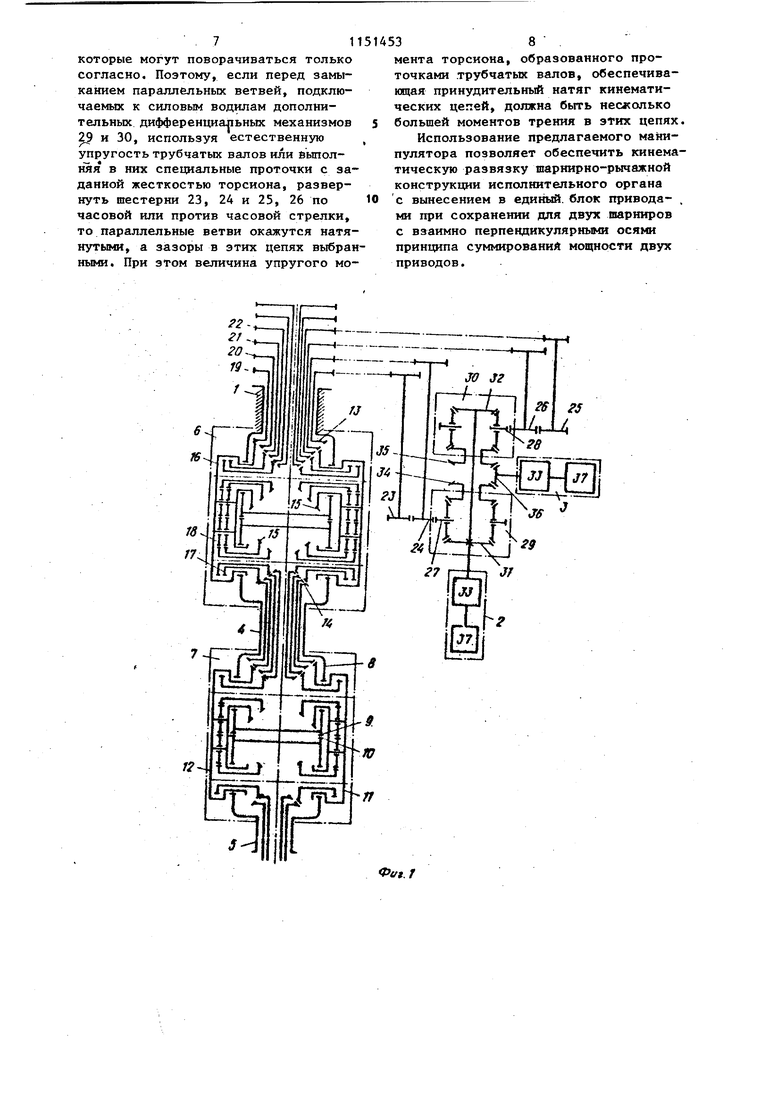
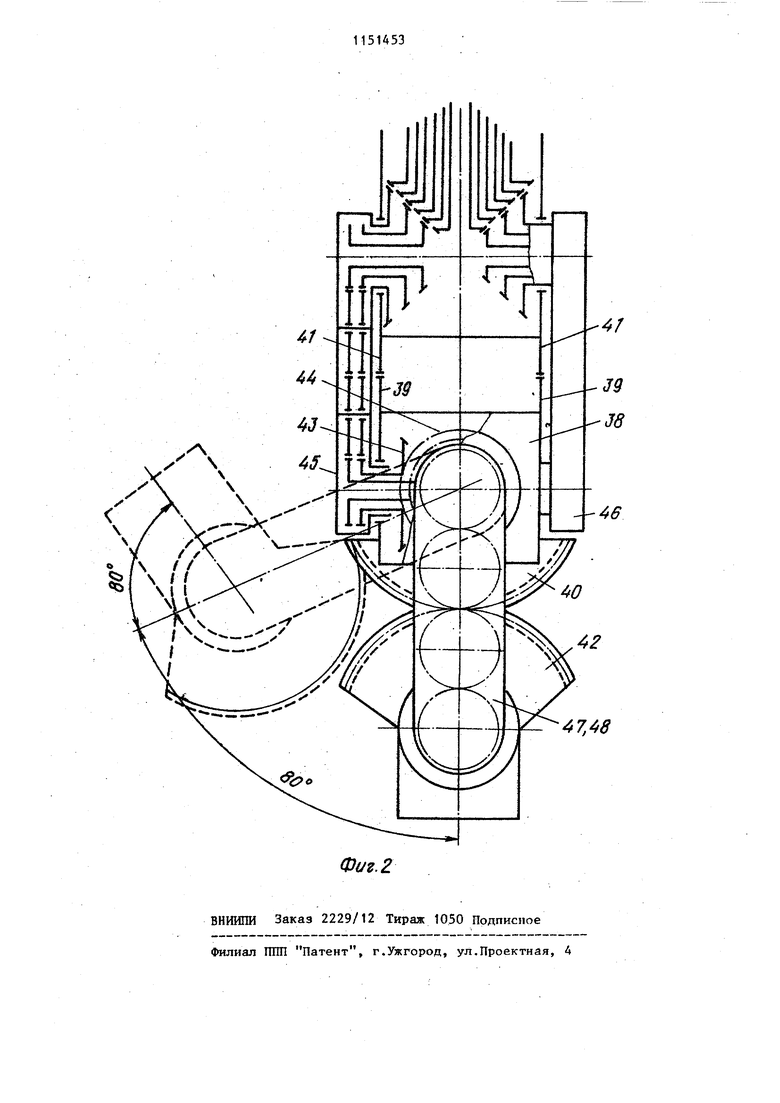
Кроме того, для повмпения маневренности манипулятор снабжен зубчатыми секторами, а каждое подвижное звено вьтолнено в виде крестовины, на которой жестко закреплены зубчатые секторы, расположенные попарно во взаимно перпендикулярных плоскостях, и сцепленных с зубчатыми секторами корпусов предвдз его и последующего звеньев,а внутри крестовины по двум взаимно перпендикулярньм ее осям равномерно справа и слева от продольэных осей звеньев расположены входны и выходные сателлиты трехзвенных ди ференциальных механизмов, которые трубчатыми валами, концентрически расположенными по осям крестовины, жестко сочленены соответственно с ведомыми зубчатыми колесами предьщу щего шарнира и ведущими зубчатыми колесами последующего шарнира, причем два периферийных входных сателлита трехзвенного дифференциального механизма жестко посажены на трубчатые отростки силовых водил трехзвенного дифференциального механизм последугацего шарнира. t На фиг. 1 изображена кинематичес кая схема манипулятора; на фиг. 2 подвижное звено в виде крестовины. Устройство содержит неподвижное основание 1, на котором установлены приводы 2 и 3 с выходными валами, подвижные звенья 4 и 5, кинематичес ки сочлененные одно с другим и неподвижным основанием двуосными шарн рами 6 и 7, причем оси шарниров раз вернуты друг относительно друга на 90. Подвижные звенья и сочлененный с первым подвижным звеном 4 корпус 1 вьшолнены в виде полых цилиндров с концентрически расположенными внутр трубчатыми валами. Полые цилиндры звеньев и корпус основания оканчива ются тройниками 8, поперечные оси которых являются осями двуосных шар ниров. На тройниках 8 жестко закреп лены зубчатые сектора 9 и tO, образующие зубчатые пары между сочленяе мыми звеньями. Сочленение звеньев осуществлено парой пустотелых силовых водил 11 и 12, трубчатые отрост ки которых с тройниками 8 образуют вращательные пары, оси которых явля ются нижней и верхней осями шарнира Внутри тройников 8 расположены ведущие 13 и ведомые 14 зубчатые колеса трехзвенных дифференциальных механизмов, жестко закрепленные на концах трубчатых валов. Сателлиты 1 этих трехзвенных дифференциальных механизмов расположены по осям шарниров равномерно по обе стороны от продольной оси звена и трубчатыми валами жестко соединены с ведущими 16 и ведомыми 17 цилиндрическими зубчатыми колес&ми, расположенными в пустотелых силовых водилах 11, и 53 12. Пара периферийных сателлитов трехзвенного дифференциального механизма предыдущего звена жестко посажена на Трубчатые отростки силовых водил 11 и 12. С помощью этих периферийных сателлитов трехзвенного диференциального механизма к шарнирам подводится движение от приводов 2 и 3. Ведущие цилиндрические зубчатые колеса 16 сцеплены с ведомыми 17 либо непосредственно, либо через проме жуточные зубчатые пары 18, образуя зубчатые передачи, передающие транзитные движения через шарнир последующим подвижным звеньям. Входные зубчатые колеса 19-22 жестко посажены на концах трубчатых валов корпуса основания 1, попарно кинематически соединены между собой суммирующими шестернями 23-26, а в свою очередь шестерни 24 и 26 сцеплены с зубчатыми колесами 27 и 28 силовых водил дополнительных дифференциальных механизмов 29 и 30. Ведущие колеса 31 и 32 этих дополнительных дифференциальных механизмов 29-и 30 спарены между собой и посажены на выходной вал редуктора 33 привода 2, а ведущие колеса 34 и 35 образуют суммирующую зубчатую коническую передачу, суьвчирующее зубчатое колесо 36 которой посажено на выходной вал редуктора 33 привода 3.Входные валы редукторов 33 сочленены с ирполнительньми двигателями 37 приводов 2 и 3. Конструкция исполнительного органа будет более компактной, а шарнир приобретает свойства, близкие шаровому шарниру, если подвижное звено 4 выполнить в виде крестовины 38. В этом случае на крестовине 38 в двух взаимно перпендикулярных плоскостях жестко крепятся зубчатые секции 39 и 40, сцепленные соответственно с зубчатьпдаг секторами 41 и 42 предьщущего и последующего подвижных звеньев. Внутри крестовины 38 располагаются сателлиты трехзвенного дифференциального механизма, причем входные сателлиты 43 размещены по одной оси крестовины, а выходные 44 - по другой и трубчатыми валами, концентрически расположенными по этим осям, жестко связаны с цилиндрическими ведомыми зубчатыми колесами первых силовых водил 45 и 46 и «1 с цилиндрическими ведущими зубчатыми колесами вторых силовых.водил А7 и 48. Устройство работает следующим образом. При согласованном вращении приводов 2 и 3 ведущие колеса 31 и 34 дополнительного дифференциального механизма 29 вращаются в разных направ лениях, а зубчатое колесо 27 силового водила остановлено. Ведущие колеса 32 и 35 дополнительного дифференциального механизма 30 имеют при этом согласованное вращение, а следовательно, зубчатое колесо 28 силового водила этого дополнительного дифференциального механизма вращается в ту же сторону, передавая движение от приводов 2 и 3 суммирующим. шестерням 25 и 26. Так осуществляется суммирование мощности двух приводов. Суммирующие шестерни 25 и 26, имея противоположные вращения, приводят во вращение в разных направлениях входные зубчатые колеса 21 и 2 передаюпше движение двуосному шарниру 7 и подвижному звену 5. Движение двуосному шарниру 7 передается трубчатыми валами, несущими зубчатые колеса 21 и 22, далее через цилиндрические зубчатые передачи 13 и 14 дву осного шарнира 6 передается трубчат ми валами подвижного звена 4, которое ведущими зубчатыми колесами поворачивает пустотелые силовые водила 1 1 и 12 двуосного шарнира 7 в одном направлении. При повороте силовых водил двуосного шарнира 7 относительно верхней оси шарнира происходит поворот в ту же сторону под вижного звена 5 относительно нижней оси шарнира, при этом зубчатый сектор 10 обкатьшается по неподвижному зубчатому сектору 9. Таким образом, суммарный угол поворота i подвижного звена 5 относительно звена 4 равен ci (1 -ь u) угол поворота силовых водил 11 и 12 относительно верхней оси двуосного шарнира; передаточное число зубчатой пары, образованной зубчатыми секторами 3 9 и 10 тройников двуосного шарнира 7. При U 1 угол поворота подвижного звена 5 равен . Если передаточные числа Цц; зубчатых цилиндрических передач, расположенные в пустотелых силовых водилах, вьтолнить равными передаточному числу и зубчатой пары, образованной зубчатыми секторами 9 и 10, то при неподвижных ведущих цилиндрических колесах 16 ведомые колеса 17 при повороте подвижного звена 5 будут синфазно с подвижным звеном 4 обкатываться относительно ведущих цилиндрических зубчатых колес 16. Этим достигается кинематическая развязка транзитных движений при изгибе подвижных звеньев. Если теперь приводам 2 и 3 сообщить встречные вращения, то обеспечивается работа манипулятора с той лишь разницей, что в этом случае зубчатое колесо 28 силового водила дополнительного дифференциального механизма 30 будет остановлено, а зубчатое колесо 27 силового водила дополнительного дифферен1Ц1ального механизма 29 приведет в движение силовые водила 11 и 12 двуосного шарнира 6 и подвижного звена 4, зубчатые колеса переворачивают силовые водила 11и 12 двуосного шарнира 7 в одном направлении. При повороте силовых водил 11 и 12двуосного шарнира 7 относительно верхней оси шарнира происходит поворот в ту же сторону подвижного звена 5 относительно нюкней оси шарнира, при этом зубчатый сектор 10 обкатывается по неподвижному зубчатому сектору 9. Достоинством любого исполнительного органа манипулятора является отсутствие зазоров в сочленениях лементов кинематических цепей. В редлагаемой конструк1 ;ии отсутствие зазоров достигается предварительной натяжкой замкнутых параллельных ветей кинематических цепей, подводящих вижение к двуосным шарнирам. Кинематические цепи, подводящие вижения к двуосным шарнирам, содерат по две параллельных ветви, котоые на неподвижном основании 1 замкуты суммирующими шестернями 23-24 25-26 соответственно, а в двуосных арнирах - силовьа«1 водилами 11 и 12,
которые могут поворачиваться только согласно. Поэтому, если перед замыканием параллельных ветвей, подключаемых к силовым водилам дополнительных дифференциальных механизмов 2 и 30, используя естественную упругость трубчатых валов или йыполмя в них специальные проточки с заданной жесткостью торсиона, развернуть шестерни 23, 24 и 25, 26 по часовой или против часовой стрелки, то параллельные ветви окажутся натянутыми, а зазоры в этих цепях выбранными. При этом величина упругого момента торсиона, образованного проточками трубчатых валов, обеспечивагацая принудительный натяг кинематических цепей, должна быть несколько большей моментов трения в этих цепях. Использование предлагаемого манипулятора позволяет обеспечить кинематическую развязку шарнирно-рычажной конструкции исполнительного органа с вынесением в единый, блок привода- , ми при сохранении для двух шарниров с взаимно перпендикулярными осями принципа суммирований мощности двух приводов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
