Область техники, к которой относится изобретение.
Приводы авиационных и робототехнических систем.
Уровень техники.
Известен шаговый привод (патент RU 2524498) с механическим побуждением и нулевым обратным усилием, не требующий для своей работы со стропами управления летательным аппаратом с мягким крылом тормоза и сцепления. В данном приводе дозированное перемещение исполнительного механизма, а также его стопорение, обеспечивается посредством кинематического звена палец-кольцо, в котором ось вращения кольца закреплена на приводе, а пальцы - на исполнительном механизме.
Если кольцо данного привода вследствие люфта недостаточно точно выставлено на границе прямой зоны пальца, то точка приложения нажима на кольцо может прийтись на изогнутую зону пальца, что вызовет появление момента на проворот кольца.
Чтобы обеспечить устойчивость кольца от самопроизвольного проворота под действием усилия от стропы, передающегося на пальцы исполнительного механизма, приходится заглублять кольцо на прямой участок пальца, вследствие чего кольцо приходится оснащать упругим звеном. Однако это усложняет механизм и уменьшает его надежность.
Базисом для улучшения данного механизма могут служить редукторы прерывистого движения с многопрорезным зубчато-цевочным внутренним зацеплением. В мальтийском механизме данного типа стопорение ведомого вала в холостой фазе движения цевки обеспечивается кулачком ведущего кривошипа в форме сектора окружности. При этом ведомая шестерня должна содержать в себе ответные поверхности в форме дуги окружности между пазами ввода цевки, что затрудняет создание компактного механизма с высоким передаточным отношением и вносит дополнительные потери на трение. С другой стороны, известны планетарные передачи с одним стержневым сателлитом внутреннего зацепления в виде двузубого шипа, сидящего на водиле в виде кривошипа. Выходным звеном такой передачи работает охватывающее зубчатое колесо. Примером такого механизма может служить известный советский игрушечный редуктор, выпускавшийся в прозрачном цилиндрическом пластмассовом корпусе. Передача последнего типа не обеспечивает нулевой обратной связи, но путем несложного преобразования способна превратиться в редуктор прерывистого движения без вышеописанного недостатка мальтийского механизма.
Раскрытие изобретения.
Целью изобретения является упрощение передаточного звена и увеличение его надежности.
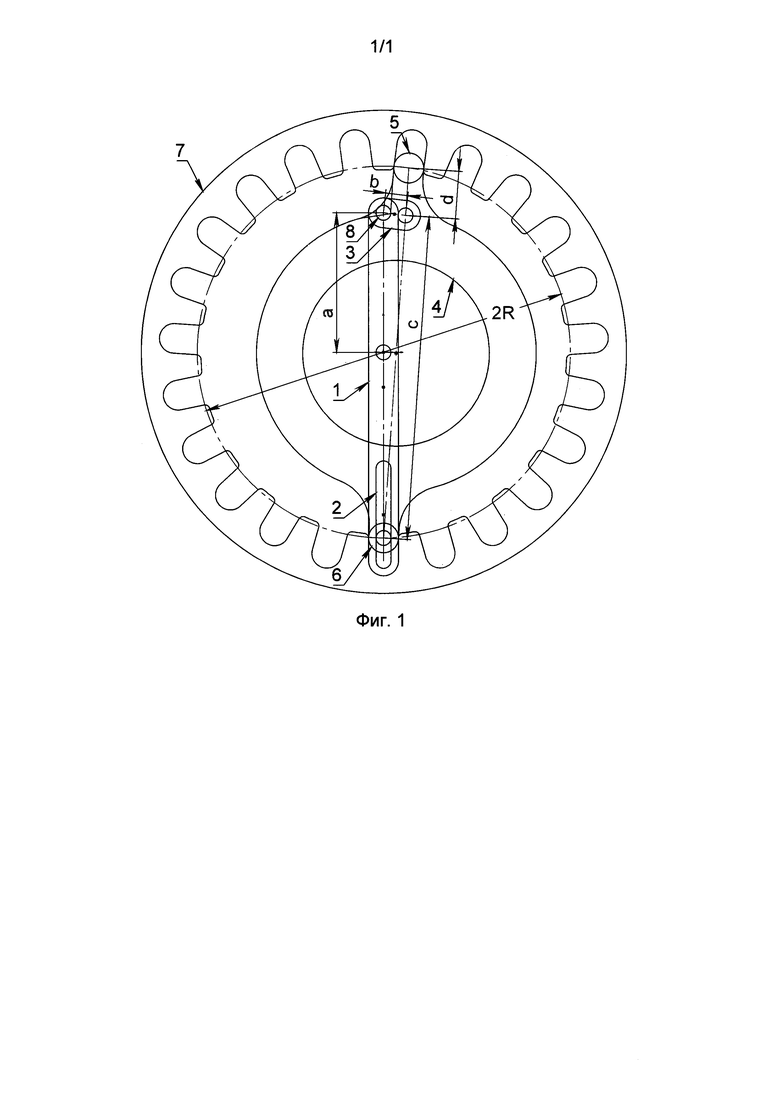
В предлагаемом решении, схематично представленном на фиг. 1, цель достигается тем, что передающее звено выполнено в виде шатуна 4 (подобного стержневому сателлиту аналога) с цевками, одна из которых (направляющая) движется в пазу суппорта, а две других (ведущая 5 и запирающая 6) поочередно входят в зацепление с зубьями ведомой шестерни исполнительного механизма 7. Движущаяся в пазу (2) суппорта (1) направляющая цевка вместе с запирающей цевкой при этом находятся напротив друг друга на одном конце шатуна, вследствие чего запирающая цевка производит возвратно-поступательное движение, периодически заходя между зубьями ведомой шестерни. Второй конец шатуна производит смешанное возвратно-поступательное и вращательное движения, для чего шатун присоединен к водилу в виде кривошипа 3 на ведущем валу передаточного механизма 8. Расстояние между ведущей осью водила-кривошипа и осью ведомой шестерни, место прохода ведомой оси кривошипа сквозь шатун и длина кривошипа выбираются таким образом, что выход ведущей цевки из зацепления с зубьями ведомой шестерни исполнительного механизма происходит одновременно с входом в зацепление с этой же шестерней запирающей цевки на противоположном конце шатуна. Дополнительное ограничение на эти параметры накладывает необходимость безударного (без боковой составляющей скорости по отношению к оси паза) входа цевок в пазы ведомой шестерни.
Осуществление изобретения.
Одному обороту ведущего вала передаточного механизма соответствует поворот ведомой шестерни исполнительного механизма на угол, соответствующий отношению удвоенного угла полного оборота к количеству пазов ведомой шестерни исполнительного механизма, в случае четного количества пазов ведомой шестерни. В этом случае шестерня имеет отдельные пазы для запирающей цевки и отдельные - для ведущей. Такую шестерню из-за ее симметрии удобно использовать при использовании двух взаимно перевернутых шатунов для уравновешивания колеблющихся масс.
Взаимно перевернутые шатуны должны быть синхронизированы в своем движении, чтобы обеспечить одновременный момент перехода между пазами ведомой шестерни.
Для уменьшения необходимого количества пазов ведомой шестерни вдвое при том же передаточном отношении целесообразно использовать нечетное количество пазов. В последнем случае для уравновешивания колеблющихся масс помимо взаимно перевернутых шатунов потребуется две ведомые шестерни на выходном валу механизма.
Для уменьшения динамических нагрузок на механизм его ведомые шестерни полезно соединять с ведомым валом через демпфер. В этом случае при применении двух ведомых шестерен на индивидуальных демпферах также уменьшаются требования к точности синхронизации взаимно перевернутых шатунов.
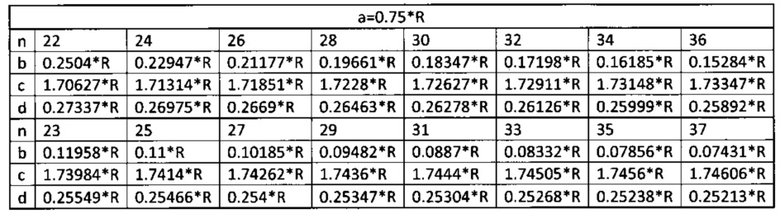
Для определения необходимых размеров звеньев кинематической цепи, показанной на фиг. 1, в качестве исходных параметров можно задать радиус одновременного соприкосновения ведущей и запирающей цевок с пазами ведомой шестерни (обозначим его «R») и расстояние между осью ведомой шестерни и ведущей осью водила-кривошипа исходя из конструктивных соображений (обозначим его «а»), или плечо кривошипа исходя из требований к мощности на ведущем валу (обозначим длину этого плеча «b»). Искомыми размерами будут длины шатуна от оси запирающей цевки до ведомой оси кривошипа (обозначим ее «с») и от ведомой оси кривошипа до ведущей цевки (обозначим ее «d»). Некоторые результаты расчетов для различного количества пазов «n» ведомой шестерни приведены ниже:
Краткое описание чертежей.
На фиг. 1 показана схема предлагаемого механизма.
Поз. 1 обозначает суппорт.
Поз. 2 - направляющий паз суппорта.
Поз. 3 - водило в виде кривошипа.
Поз. 4 - шатун.
Поз. 5 - ведущая цевка.
Поз. 6 - запирающая цевка.
Поз. 7 - ведомая шестерня исполнительного механизма.
Поз. 8 - ведущий вал передаточного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ШАГОВЫЙ ПРИВОД С МЕХАНИЧЕСКИМ ПОБУЖДЕНИЕМ И НУЛЕВЫМ ОБРАТНЫМ УСИЛИЕМ | 2013 |
|
RU2524498C1 |
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Комбинированные ножницы | 1985 |
|
SU1286350A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ И ПРИВОД РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА | 2009 |
|
RU2465474C2 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С ВНЕЦЕНТРОИДНЫМ ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ ПЕТРОВСКОГО | 2021 |
|
RU2766626C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕРАБОТКИ ЗЕРНА | 1994 |
|
RU2067833C1 |
Изобретение относится к области машиностроения, а более конкретно к шаговым приводам. Редуктор имеет передающее звено в виде сателлита внутреннего зацепления, сидящего на водиле в виде кривошипа, и выходное звено в виде охватывающей шестерни. Передающее звено выполнено в виде шатуна с цевками на концах. Одна из цевок утоплена в паз суппорта, вторая находится на том же конце шатуна с его обратной стороны, а третья - на противоположном конце шатуна. Шатун присоединен к водилу так, что с охватывающей шестерней всегда сцеплена минимум одна из цевок шатуна. Выход ведущей цевки из зацепления с зубьями ведомой шестерни исполнительного механизма происходит одновременно с входом в зацепление с этой же шестерней запирающей цевки на противоположном конце шатуна. Достигается повышение надежности. 1 ил.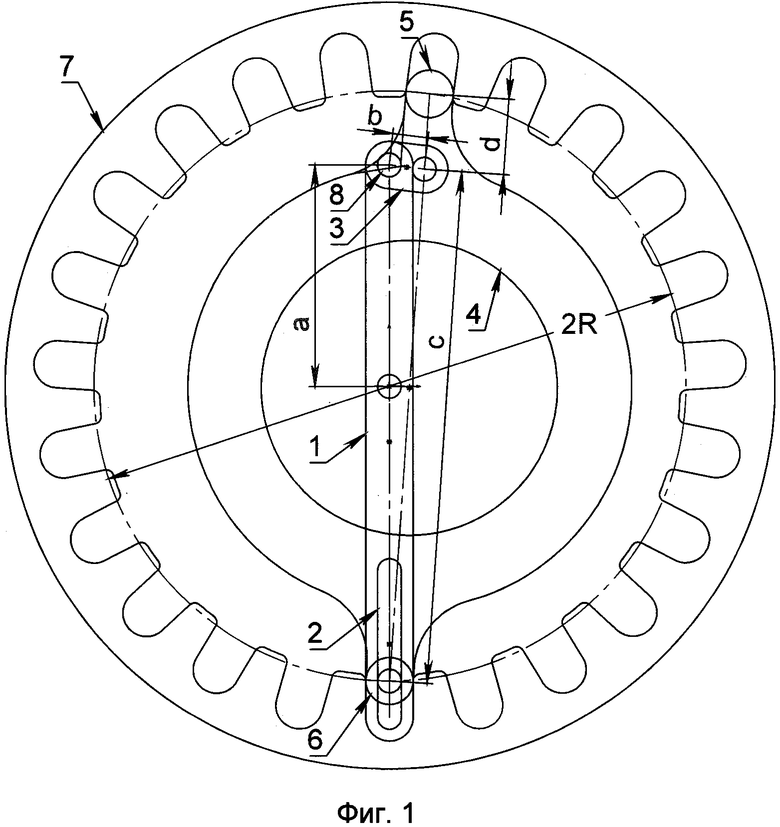
Редуктор с передающим звеном в виде сателлита внутреннего зацепления, сидящего на водиле в виде кривошипа, и имеющий выходное звено в виде охватывающей шестерни, отличающийся тем, что передающее звено выполнено в виде шатуна с цевками на концах, одна из которых утоплена в паз суппорта, вторая находится на том же конце шатуна с его обратной стороны, а третья - на противоположном конце шатуна, при этом шатун присоединен к водилу так, что с охватывающей шестерней всегда сцеплена минимум одна из цевок шатуна.
| ШАГОВЫЙ ПРИВОД С МЕХАНИЧЕСКИМ ПОБУЖДЕНИЕМ И НУЛЕВЫМ ОБРАТНЫМ УСИЛИЕМ | 2013 |
|
RU2524498C1 |
| ПЛАНЕТАРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 1991 |
|
RU2029186C1 |
| US 4875382 A1, 24.10.1989. | |||

