1
Изобретение относится к автоматике и предназначено для использования в системах числового программного управления станками.
Известны устройства, содержащие комплекс оборудования, входящий в состав системы числового программного управления и решающий задачи измерения фактического положения управляемого объекта, сравнения этого положения с положением, задаваемым программой, и формирования разностного сигнала (сигнала ошибки), подаваемого затем на вход усилителя мощности привода подач станка 1.
Для измерения фактического положения управляемого объекта в системах числового программного управления широко применяют фазовые датчики (индуктосин, вращающийся трансформатор), позволяющие использовать их в двух режимах, амплитудном и фазовом.
Устройства, основанные на амплитудном режиме датчика, сложны, поэтому находят применение в системах управления точных станков: расточных, обрабатывающих центров и т. п.
Наиболее близким по технической сущности к изобретению является устройство для управления следящим приводом, которое состоит из генератора импульсов, опорного делителя, формирователя питающих напряжений датчика, двух суммирующих устройств, вычитающего устройства, делителя частоты, дискриминатора и датчика обратной связи с усилителем-формирователем 2. Генератор импульсов соединен со входом опорного делителя, выходы которого через формирователь питающих напряжений подключены ко входным обмоткам датчика. Выход датчика через усилительформирователь соединен с первым входом дискриминатора, второй вход которого подключен к выходу делителя частоты, а выход является выходом устройства. В устройстве имеется также вычитающее устройство и два суммирующих устройства, причем вход положительного программного перемещения подключен ко входу первого
суммирующего устройства, а вход отрицательного перемещения подключен ко входу вычитающего з стройства. Выходы первого суммирующего и вычитающего устройств через второе суммирующее устройство подключены ко входу делителя частоты, а два входа синхронизации их подключены к выходам опорного делителя. Однако датчик обратной связи типа индуктосин работает на высоких частотах,
близких к предельно допустимым для интегральных микросхем, в результате чего устойчивость его снижается.
Целью изобретения является повышение устойчивости работы устройства для управления следящим приводом.
Цель достигается тем, что в устройство введены два дешифратора и два генератора одиночных импульсов, выходы которых через второй делитель частоты подсоединены ко входам дешифраторов, выходы которых подключены ко входам соответствующих генераторов одиночных импульсов, а выход генератора тактовой частоты соединен с третьим входом второго делителя частоты.
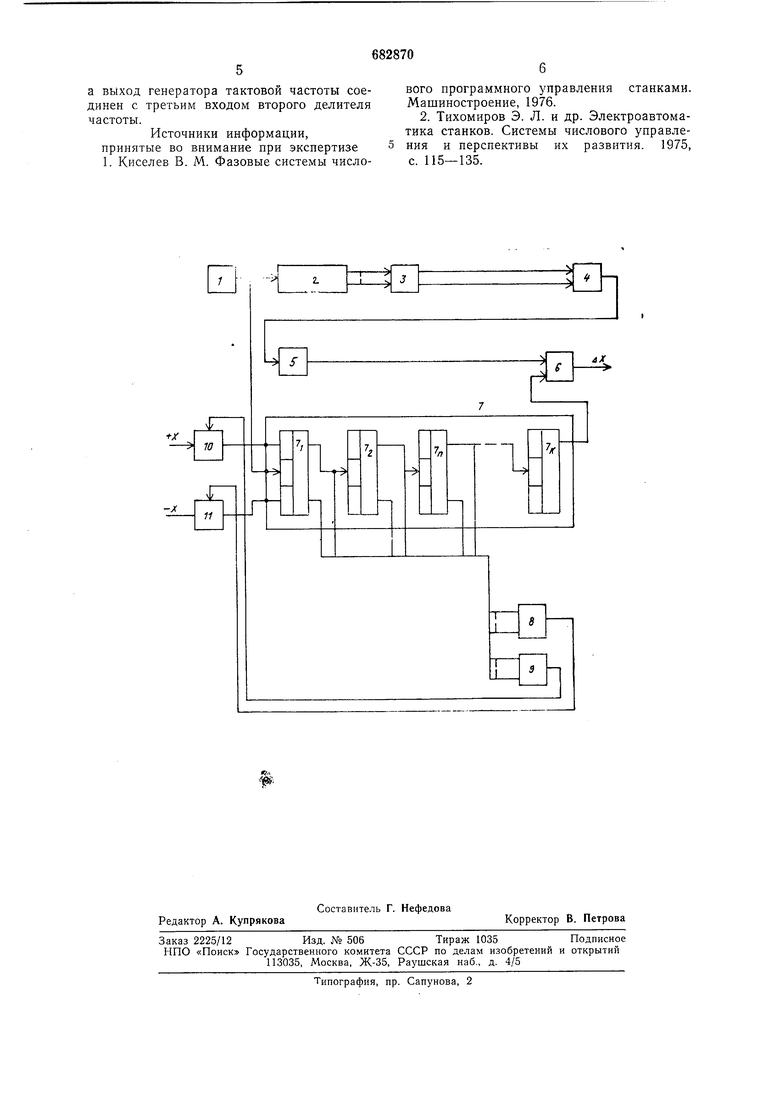
Блок-схема устройства для управления следящим приводом приведена на чертеже.
Устройство содержит генератор 1 тактовой частоты, первый делитель 2 частоты, формирователь 3 импульсов, датчик 4 перемещений, усилитель 5, дискриминатор 6, второй делитель 7 частоты, триггеры делителя частоты, дешифраторы 8, 9, генераторы 10, 11 одиночных импульсов.
Устройство управления следящим приводом работает следующим образом.
Импульсы тактовой частоты с выхода генератора 1 поступают на вход первого делителя 2. Опорный делитель 2 делит тактовую частоту до величины, определяемой параметрами датчика. Выходные сигналы делителя 2 затем поступают в формирователь 3, в котором производится формирование двух импульсных сигналов требуемой мощности со скважностью равной 2 (меандр) и сдвинутых относительно друг друга на четверть периода. Эти сигналы подаются на входные обмотки датчика 4 перемещения. Выходной сигнал датчика 4 с помощью усилителя 5 усиливается, из пего выделяется первая гармоника, из которой затем формируется импульсный сигнал. При этом фаза импульсного сигнала на выходе усилителя 5 определяется измеряемым перемещением. Этот сигнал поступает па первый вход дискриминатора 6, на второй вход которого поступает сигнал с выхода второго делителя 7. Вход делителя 7 подключен к генератору 1, а его коэффициент деления равен коэффициенту деления делителя 2. Поэтому частоты сигналов, поступающих на входы дискриминатора 6, равны. Дискриминатор 6 в зависимости от фаз входных сигналов, вырабатывает щиротно-импульспый сигпал Ах, управляющий приводом.
При работе совместно с устройством числового программного управления от интерполятора поступают импульсы по одному из каналов +Х, -X. Эти импульсы поступают на входы генераторов 10, 11 одиночных импульсов. Генераторы одиночных импульсов опращиваются импульсами с дешифраторов 8 и 9. Дешифратор 9 выдает сигнал в том случае, если п младших разрядов делителя 7 находятся в нулевых состояниях, а дешифратор 8 выдает сигнал при единичных состояниях этих триггеров. Импульсы с выхода дещифратора 9 опрашивают геператор 10 одиночных импульсов. Если перед этим на его вход поступил импульс положительного программного перемещения (от интерполятора устройства ЧПУ), то этот геператор выдает импульс, поступающий на установочный вход триггера делителя 7. В результате этого триггер делителя 7 устанавливается из состояния «О в состояние «1, что равноценно добавлению одного импульса в тактовую последовательность. Вследствие этого фаза выходного сигнала делителя 7 сдвигается на один шаг в положительном направлении.
Импульсы с выхода дешифратора 8 опрашивают генератор 11 одиночных импульсов. Если перед приходом опрашиваемого импульса на вход генератора 11 одиночных импульсов поступил импульс отрицательного программного перемещения, то этот генератор выдает импульс, поступающий далее на другой установочный вход триггера делителя 7. В результате этого этот триггер из состояния «1 переключается в состояние «О, что равноценно вычеркиванию одного импульса из тактовой последовательности. Фаза выходного сигнала делителя 7 вследствие этого сдвигается на один шаг в отрицательном направлении. Таким образом, каждый импульс программного перемещения вызывает сдвиг фазы
выходного сигнала делителя 7 на один шаг. В результате сдвига фазы сигнала делителя 7 на выходе дискриминатора 6 появляется управляющий сигнал, который вызывает перемещение управляемого объекта, а
вместе с ним и подвижного элемента датчика 4 в нужном направлении. В связи с этим сигпал на выходе датчика 4 сдвигается по фазе до тех пор, пока сигнал на выходе дискриминатора 6 не станет равным
нулю.
Изобретение позволяет снизить в два раза рабочую частоту устройства и тем самым повысить устойчивость его работы.
Формулаизобретения
Устройство для управления следящим приводом, содержащее последовательно соединенные генератор тактовой частоты, первый делитель частоты, формирователь
импульсов, датчик перемещений, усилитель и дискриминатор, второй вход которого подключен к выходу второго делителя частоты, отличающееся тем, что, с целью повышения устойчивости устройства, в него введены два дешифратора и два генератора одиночных импульсов, выходы которых через второй делитель частоты подсоединены ко входам дешифраторов, выходы которых подключены ко входам соответствующих генераторов одиночных импульсов,
а выход генератора тактовой частоты соединен с третьим входом второго делителя частоты.
Источники информации, принятые во внимание при экспертизе 1. Киселев В. М. Фазовые системы числового программного управления станками. Машиностроение, 1976.
2. Тихомиров Э. Л. и др. Электроавтоматика станков. Системы числового управления и перспективы их развития. 1975, с. 115-135.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления следящим приводом | 1978 |
|
SU736052A1 |
| Устройство для управления следящим приводом | 1985 |
|
SU1308988A1 |
| Устройство для управления следящим приводом | 1985 |
|
SU1278810A1 |
| Устройство для управления следящим приводом | 1985 |
|
SU1293694A1 |
| Устройство для управления следящим приводом | 1986 |
|
SU1416939A1 |
| Устройство для программного управленияпРиВОдОМ CTAHKA | 1979 |
|
SU830312A1 |
| Устройство для программного управления | 1975 |
|
SU601662A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Устройство управления следящим приводом | 1986 |
|
SU1383288A1 |
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
-X
