1
Предлагаемое изобретение относится к области автома-вическотх) управления исполнительными механизмами и может npjjменяться для числового программного управления- метапаорежушими станками, имеющимн лифт в кинематике приводов.
Известны следящие приводы с коррекцией кинематического люфта, осуществляемой охватом в 3orie люфта преобразователя и двигателя жесткими обратными связями по скорости двигателя 1 или по положению его L2j .
Недостатками известных приводов являются пониженные точность и скорость слежения в зоне люфта.
Наиболее близким техническим решением к предлагаемому изобретению является устройство, содержащее блок управления и последовательно соединенные блок задания программы, делитель частоты, фазовый дискриминатор и привод с кинематическим люфтом, подключенный к первому и второму датчикам перемещений з .
Недостатком этого устройства является низкие точность и быстродействие из-за
влияния люфта при отсутствии программы, т.к. устройство при этом замкнуто на второй датчик перемещений.
Целью изобретения является повышение точности и быстродействия устройства за счет обеспечения его устойчивости в зоне люфта при отсутствии программы.
Эта цель достигается тем, что устройство содержит коммутатор, первый вход которого подключен к выходу блока управления, а выход - к другому входу делителя частоты, элементы И-ИЛИ, первые входы которого подключены к датчикам перемещений, а выход - ко входу блока управления и другому входу фазового дискриминатора, и формирователь импульсов, вход которого соединен с выходом блока задания программы, а выходы формирователя импульсов подключены к соответствующим входам коммутатора, блока управления и элемента И-ИЛИ.
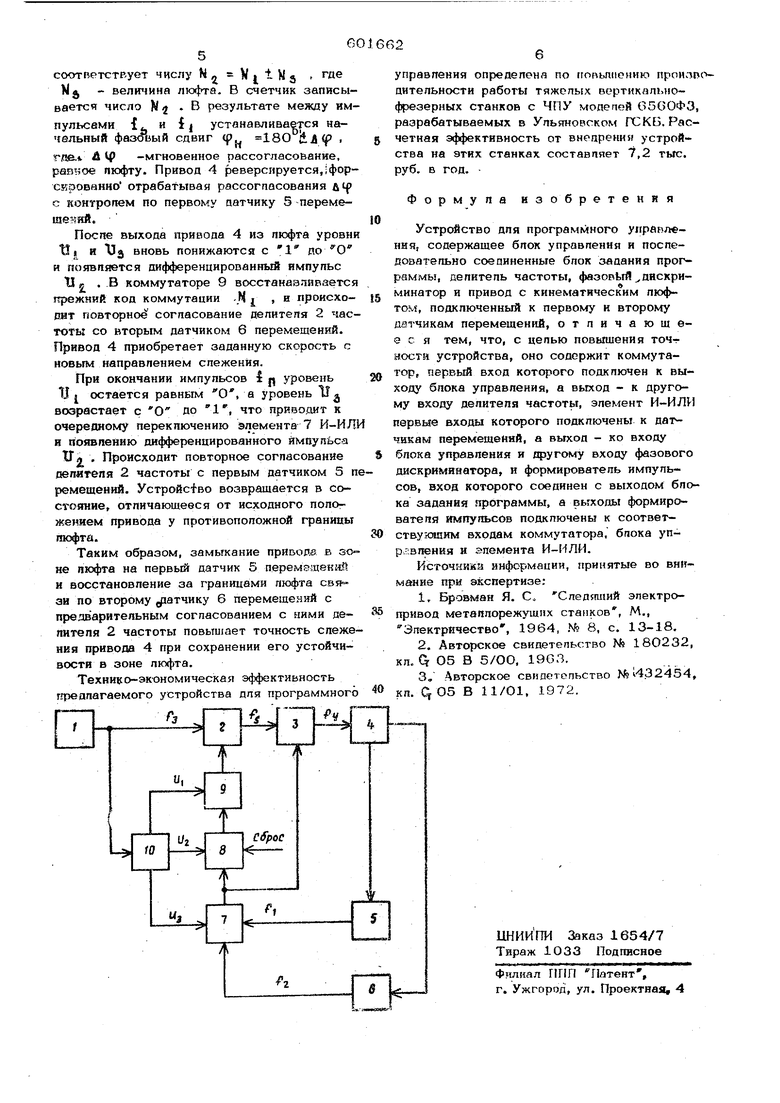
Структурная схема устройства программного управления представлена на чертеже
Устройство содержит блок 1 задания программы, дeлиfeль 2 частоты, фазовый дискриминатор 3, привод 4 с кинематическим люфтом, первый датчик 5 перемещений, второй датчик б перемешений, элемент 7 И-ИЛИ, блок 8 управления, коммутатор 9 и формирователь 10 импульсов Датчики 5 и 6 перемещений подсоединены к приводу 4 до и после кинематическ го люфта. Делитель 2 частоты состоит из двоичного счетчика, стробирующего формирователя, дешифратора и элемента И, Блок 8 управления состоит из триггера элемента И-ИЕ с задержкой фронта по одному из и элемента И. На чертеже приняты условные обозначения:i - частота задающих импульсов; .tinr где ± и t . - частоты тактовых и про раммных импульсов; 1 g - частота модулированных по фазе импульсов; ij,l2 частоты импульсов первого и второго датчиков перемещений; f - частота широтно-модулированных импульсов; tJ. - одиночный импульс, формируемы при изменении знака импульсов 4 ; llj, -одиночный импульс, формируемый при изменении знака и окончании импульсо tJ, -одиночный импульс, равный dB. Делитель 2 частоты служит для деления частоты tj, до частоты И модуляции по фазе импульсов 1 в функ ции чартоты . Требуемый коэффициен деления К достигается охватом младши разрядов счетчика обратной связью по выходу старших разрядов через стробируюшц формирователь. Дешифратор и элемент И формируют выходные импульсы i Блок 8 управления и коммутатор 9 сл жат для оперативной и автоматической ус тановкн начального фазового сдвига ф между импульсами i g и 1 . или f, Оперативная установка осуществляется пр запуске устройства по первому импульсу i,/ . По команде Сброс блок 8 управ I.6 ления кратковременно открывается и пропускает один импульс 1. на вход коммут тора 9, Последний распределяет импульс между установочными входами счет чика по двоичному коду числа N , GOответствуюшего половине объема счетчика В счетчик записывается число N, . В результате первый импульс Ig на выходе делителя 2 частоты появится после подачи на его вход Ч импульсов I g, . Посколькуf.j/K- 2 i , то начальный фазовый сдвиТ цз между нмпульсами ig и Ij. составит 18О°. Фазовый дискриминатор 3 преобразует импульсы ротно-модулированные импульсы f.. , характеризуемые. скважностью ос . При О ф„ 180,о(ц 2 и привод 4 нелодвижен. При , оС rt „ 1 4 л и привод 4 имеет скорость слежения, пропорциональную мгновенному рассогласованию .Д.ф (или Дои , чуо то же самое). Импульсный формирователь 10 спчу/ззл для формирования импульсов 1Jj,1J,U. по первому, второму и третьему выходам. Импульс TJ| имеет длительность, равную времени прохождения приводом люфта. Импульс tTj имеет переменную длительность, равную длительности импульса И i при иэменении знака импульсов i. и равную длительности паузы при окончании импульсов н . В исходном состоянии устройства импульсы { отсутствуют, уровни и I и If 2 ра&ны О, а jtfj . При этом элемент 7 И-ИЛИ открыт для импульсов f j и закрыт для нмпульсов :i, . Привод 4 замкнут на первый датчик 5 перемещений и неподвижен у одной из границ лкх{)та. При появлении импульсов f с тем же знаком, что был до их окончания, уровень Uj. остается по - прежнему О, а уровень и5 понижается с 1 до О, что приводит к переключенюо элемента 7 И-ИЛИ и появлению дифференцированного импульса tJ . Последний, имитируя команду Сброс, кратковременно открывает блок 8 управления для первоЛ) импульса . f/ . Далее аналогично описанному повторяется согласование делителя 2 частоты со вторым датчиком 6 перемещений. Между импульсами f-g и i J, устанавливается начальный фазовый сдвиг ф 180°; который затем изменяется до ф «ф±Аф . Привод 4 приобретает заданную скорость и направление слежения. При последующем изменений знак им пульсов I на противоположный уровни и. и TJ возрастают с О до 1 и вновь появляется дифференцированный импульс 1Гя . уровень U; закрывает элемент 7 И-ИЛИ для импульсов f и открывает для импульсов | . Импульс и я кратковременно открывает блок 8 управления для первого импульса f ( Х-й уровень Ui изменяет код коммутации первого импульса f . в коммутаторе 9 в зависимости от нового знака импульи,предварительно установленной величины лифта. Новый код коммутации
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсно-фазовая следящая система | 1977 |
|
SU679934A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Устройство для программного управления | 1979 |
|
SU862117A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| Устройство тактовой синхронизации псевдослучайных последовательностей | 1983 |
|
SU1092744A1 |
| Устройство для управленияпРиВОдОМ | 1978 |
|
SU809056A1 |
| Преобразователь код-угол | 1980 |
|
SU858053A1 |
