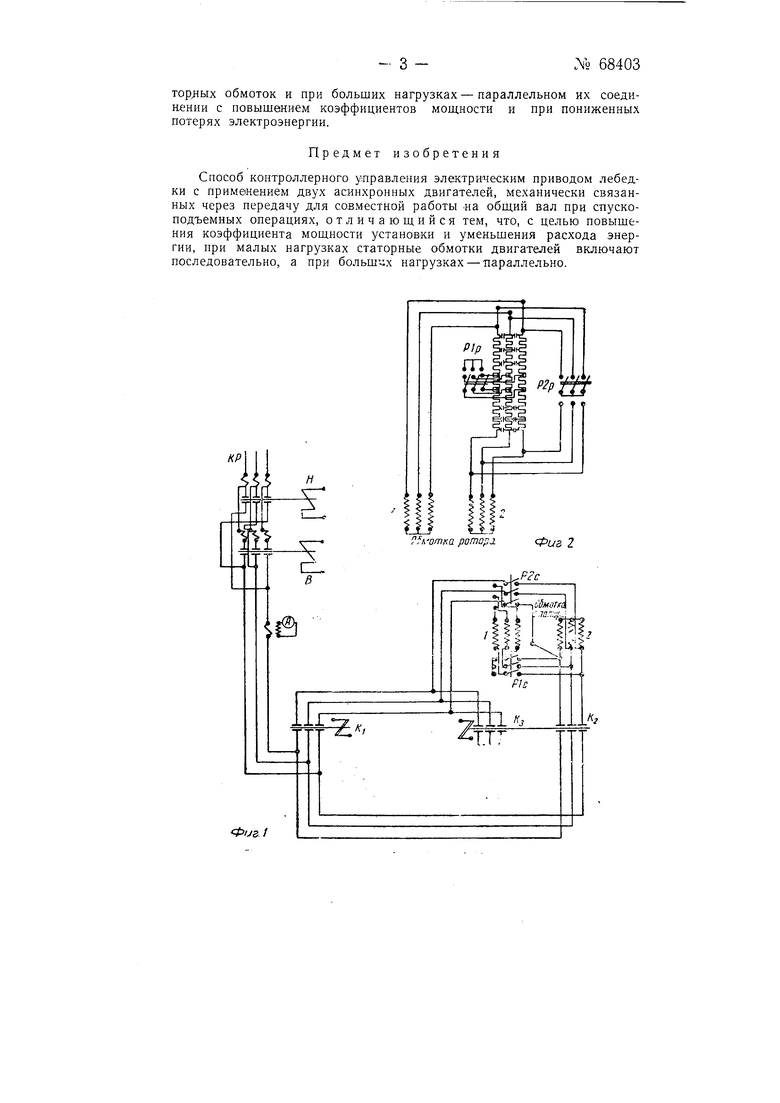
Известные способы контроллерного управления электрическим приводом лебедки, осуществляемые при помощи двух асинхронных двигателей, механически связанных через передачу для совместной работы на общий вал при спуско-подъемных операциях, не обеспечивают возможности повыщения коэффициента мощности установки и уменьщение расхода энергии. Это достигается включением статорных обмоток двигателей при малых нагрузках последовательно, а при больщих нагрузках параллельно и составляет предмет данного изобретенияНа фиг. 1 и 2 изображены принципиальные схемы включения статорных и роторных обмоток двух асинхронных двигателей, в соответствии с предлагаемым способом (на схемах показаны только силовые цепи и :не показаны цепи управления).
Напряжение от распределительного пункта подается на контакты контакторов реверса КР и от них - к контактам контакторов Ki и / 2Контактор KI служит для подачи напряжения на зажимы статорных об.моток двигателей при их последовательном соединении, а контактор /(2 - при их параллельном соединении. Контактор Кз служит для переключения на звезду статорных обмоток двигателя 1 в момент перевода обоих двигателей на |Параллельное соединение.
В схеме коммутации статорных цепей электрических двигателей показаны переключатели Р/с и Р2с. Их назначение состоит в том, чтобы при выходе из строя одного из двигателей осуществить с малой затратой времени переключение схемы привода на работу с одни.м двигателем.
Фазы роторных обмоток (фиг. 2) включены на общее сопротивление навстречу друг другу. Переключатель Pip в роторной цепи при его замыкании уменьщает сопротивление фаз при работе двух дв 1гателейПереключатель Р2р предназначен для замыкания на звезду концов фаз сопротивлений при работе одного двигателя. В зависимости от того, какой из двигателей будет работать, производится замыканиг звезды переключателем с одной или другой стороны сопротивлений.
№ 68403- 2 При работе двух двигателей переключатель Р2с переводится в левое положение и тем самым подключаются к сети концы статорной обмотки двигателя 1. Переключатель Р1с ставится в крайнее правое положение. Обмотки статорных цепей оказываются включенными последовательно. В роторной же цепи переключатель Pip включается, а переключатель Р2р выключается. В таком виде двигатели 1 и 2 подготовлены к совместной работе.
После включения схемы выводят часть сопротивления в роторной цепи двигателя 1. Вслед за этим выводят такую же часть сопротивления в цепи ротора двигателя 2, после чего дальнейший вывод сопротивлений производится симметрично путем одновременного включения контактов в двух роторных цепях. Несимметричное выключение сопротивлений в начале предусмотрено для того, чтобы при наличии асимметрии получать провал кривой момента на полусинхронной скорости и тем самым «а малой скорости плавно производить отворачивание инструмента.
Осуществляется это следующим образом. При повороте бурильщиком управления контроллера замыкается контакт в цепи катушки контактора KI. Последний срабатывает и подключает последовательно соединенные статорные обмотки двигателей / и 2 к контактам контакторов реверса КР. Вслед за этим включается контакт в цепи катушки В контактора «вперед (или в цени катушки Я контактора «назад, в зависимости от требуемого направления вращения привода). Включенное таким образом в статорную цепь напряжение (440 в) распределится по статорным обмоткам пополам, т. е. обмотка каждого двигателя будет находиться под напряжением 220 в. Двигатели при таком включении могут работать до тех пор, пока будет необходим малый момент, который имеет место при вспомогательных работах и при включении механических скоростей.
При возрастании момента бурильщик с помощью контроллера выводит сопротивления и двигатели продолжают работать при последовательном соединении их статорных обмоток. Дальнейшим поворотом контроллера катушка контактора К отключается. В результате последовательная цепь статорных обмоток размыкается. Затем включается катушка контактора Kz, что приводит к одновременному замыканию контакторов К2 и /Сз- При этом обмотки, двигателей оказываются включенными параллельно; при подаче номинального напряжения (440 в в обмотки двигателей последние работают по обычной схеме и в дальнейшем ускорение двигателей .происходит в результате симметричного выключения сопротивлений.
Таким образом, существуют два режима работы двигателей. В первом режиме работа двигателей протекает при последовательном соединении статорных обмоток, т. е. при половинном напряжении, а следо-, вательно, с моментом в 4 раза меньшим номинального. Во втором режиме работа двигателей протекает в соответствии с номинальными их параметрами.
При уменьшении номинального момента в 4 раза из-за снижения напряжения уменьшается также реактивная мощность несколько более, чем в 4 раза, что обусловливает резкое повышение коэффициента мощности при работе двигателей с малыми нагрузками.
Одновременно со снижением реактивной мощности резко снижается ток сети, а следовательно, значительно сокращаются потери в сети и в обмотках двигателей.
Способ управления приводом обеспечивает возможность производить работу при малых нагрузках - последовательном соединении ста