(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ КОПАНИЯ
ЭКСКАВАТОРА
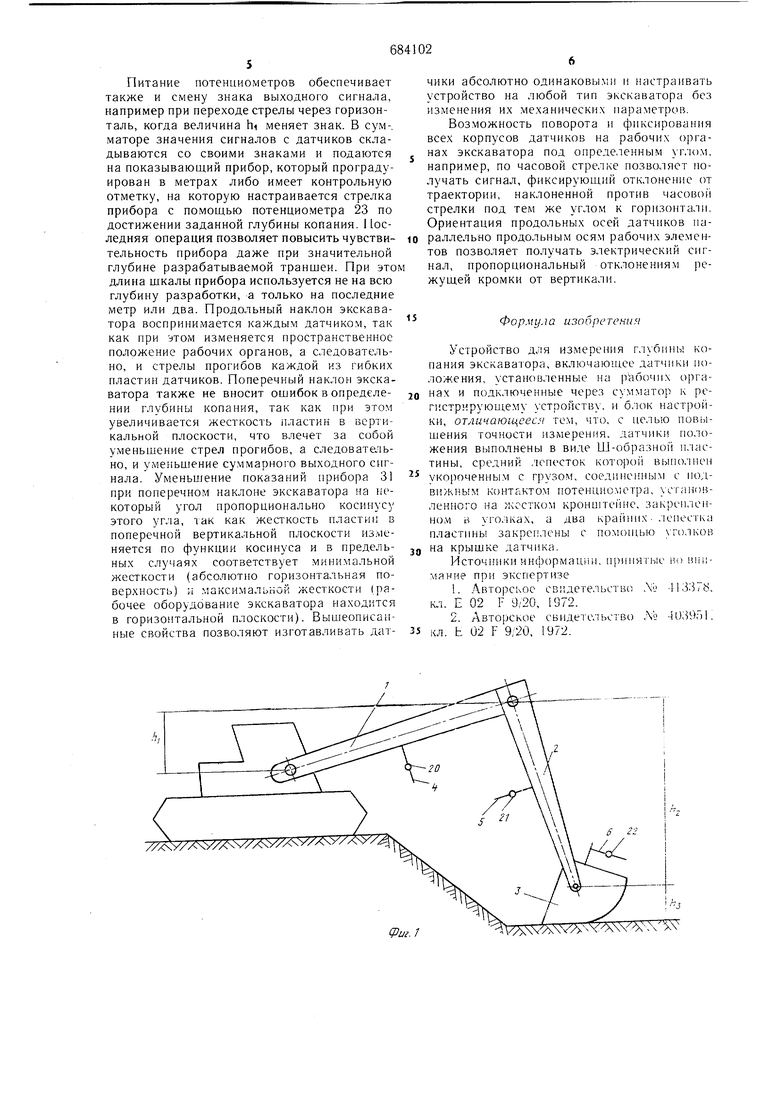
поворотных оснований на соответствующих ti;;6o4nx органах. Датчик включает в себя корпус 7, к которому притягивается болта; ми крышка 8. На крышке закреплены уголки 9, в которых защемлена Ш-образная пластина 10. На .ее внутреннем листке расположен груз 11. Свободный конец ползунка 12 скользит по потенциометру 13, установленному на жестком кронщтейне 14, также закрепленном в уголках 9. Провода с потенциометром 13 собраны на штепсельном разъеме 15. Корпус датчика заполняется демпфирующей жидкостью через отверстие для болта 16.
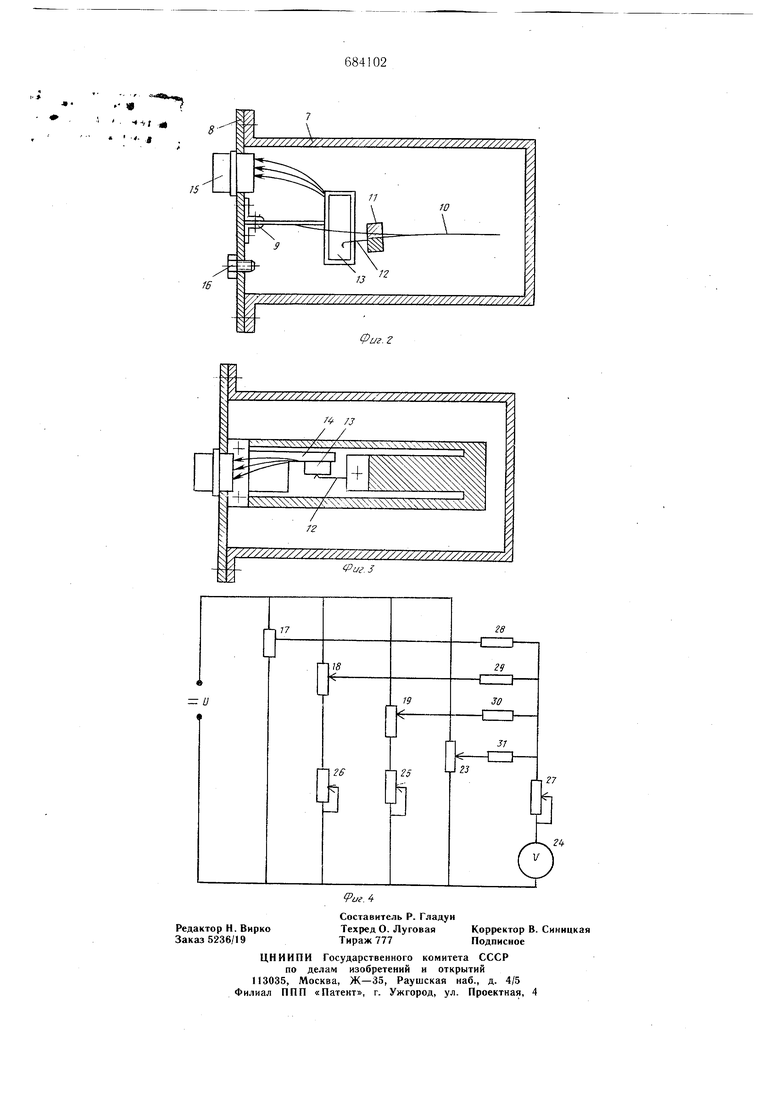
Потенциометры 17-19 аналогичны потенциометру 13 и установлены соответственно в корпусах датчиков стрелы, рукояти и ковша и выгюняют роль чувствительных элементов, ф 1КС1-;рующих величину прогиба гибких пластин датчиков 4-6 от действия грузов 20-22. Потенциометр 23 служит для установки стрелки иоказываюшего прибора 24 в необходимое положение и находится в кабине экскаватора. В кабине размещены также и потенциометры 25 и 26, с помощью которых плавно регулируется напряжение, подводимое к потенциометра. 18 и 19 датчиков рукояти ковша. Потенциометр 27 предназначен для изменения чувствительности устройства. В качестве показывающего прибора 24 исиользуется вольтметр, на который подается су.умариый электрический сигнал с резисторов 28-31. Вместо вольтметра может быть использован любой регистрноующий прибор (самогППпущий, цифровой и др.).
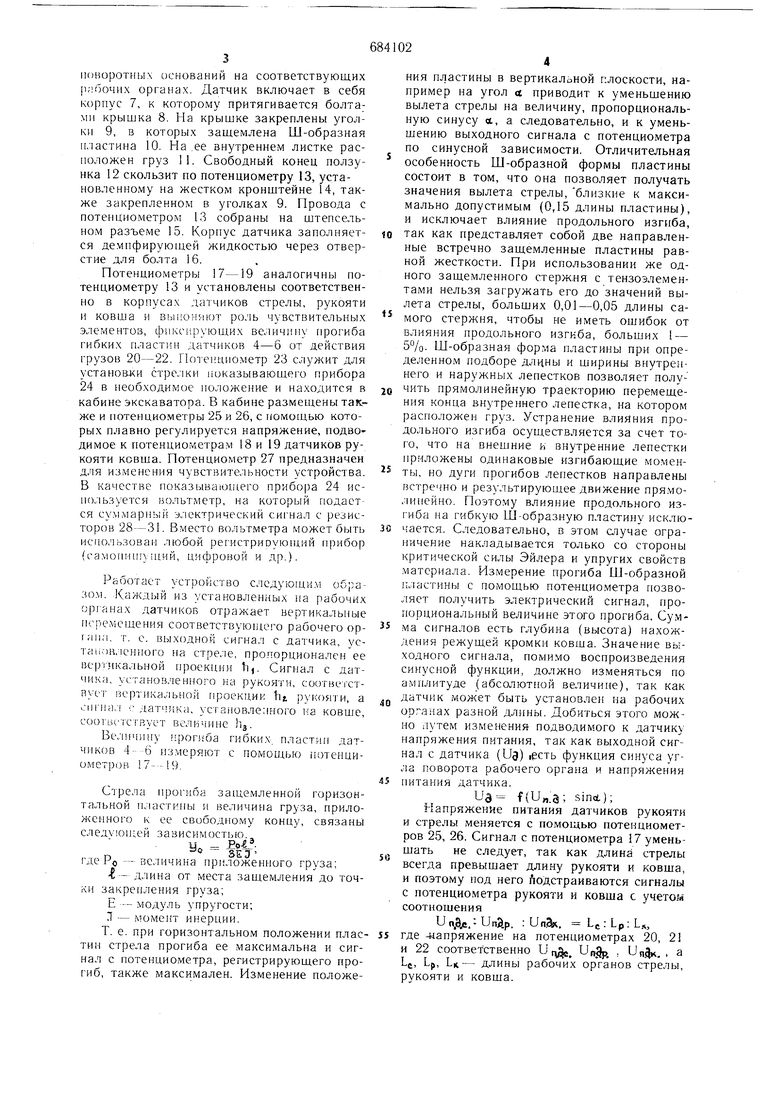
Работает устройство следуюп.1к. образо.1. Каждый из установленных на рабочих opianax датчиког5 отражает вертикальные пс|)емещения соответствующего рабочего ор(aii;i, т. е. выходной сигнал с датчика, уста liOH.iennoro на стреле, пропорционален ее вертикальной проекции ti. Сигнал с датчика, установленного на рукояти, соответствует вертикальной проекции hj рукояти, а :llrнa.;i г датчика, установленного lia ковще.
Ве.лпчипу прогиба гибких, пластин датчиков 4-6 измеряют с помощью потенциометров 17---19,
Сарела прогиба защемленной горизонтальной пластины и величина груза, приложенного к ее свободному концу, связаны
)П;ей зависимостью., у. Ро4 SE 3 где РО -- величина приложенного груза;
I - д,1ина от места защемления до точки закрепления груза;
Е - М0л1уль упругости;
Л - момент инерции.
Т. е. при горизонтальном положении пластин стрела прогиба ее максимальна и сигнал с потенциометра, регистрирующего прогиб, также .максимален. Изменение положения п,ластины в вертикалоной плоскости, например на угол л приводит к уменьшению вылета стрелы на величину, пропорциональную синусу а, а следовательно, и к уменьшению выходного сигнала с потенциометра по синусной зависимости. Отличительная особенность Ш-образной формы пластины состоит в том, что она позволяет получать значения вылета стрелы, близкие к максимально допустимым (0,15 длины пластины), и исключает влияние продольного изгиба,
так как представляет собой две направленные встречно защемленные пластины равной жесткости. При использовании же одного защемленного стерж.ня с тензоэлементами нельзя загружать его до значений вылета стрелы, больших 0,01-0,05 длины са мого стержня, чтобы не иметь ошибок от влияния продольного изгиба, больших 1 - 5%- Ш-образная фор.ма пластины при определенном подборе длчны и щирины внутреннего и наружных лепестков позволяет полуе чить прямолинейную траекторию перемещения конца внутреннего лепестка, на котором расположен груз. Устранение влияния продольного изгиба осуществляется за счет того, что на внещние и внутренние лепестки приложены одинаковые изгибающие моменты, но дуги прогибов лепестков направлены встречно и результирующее движение прямолипейно. Поэтому влияние продольного изгиба на гибкую Ш-образпую пластину исключается. Следовательно, в этом случае ограпичение накладывается только со стороны критической силы Эйлера и упругих свойств .материала. Измерение прогиба Ш-образной пластины с помощью потенциометра позволяет получить электрический сигнал, пропорциональный величине этого прогиба, Су.м5 .ма сигналов есть глубина (высота) нахождения режущей кромки ковша. Значение выходного сигнала, поми.мо воспроизведения синусной функции, должно изменяться по амплитуде (абсолютной величине), так как датчик может быть установлен па рабочих органах разной длины. Добиться этого можно путем изменений подводимого к датчику напряжения питания, так как выходной сигнал с датчика (Уз) igCTb функция синуса угла поворота рабочего органа и напряжения
5 питания датчика.
иа f( );
Напряжение питания датчиков рукояти и стрелы меняется с помощью потенциометров 25, 26. Сигнал с потенциометра 7 уменьшать не следует, так как длина стрелы всегда превышает длину рукояти и ковша, и поэтому под него йодстраиваются сигналы с потенциометра рукояти и ковша с учетом соотношения
и 0.,: ипЗ.р. : Ua. LC : Lp: L.,, 5 где -напряжение на потенциометрах 20, 21 и 22 соответственно U п. Un,5K, , а LC, Lp, LH- длины рабочих органов стрелы, рукояти и ковша. Питание потенциометров обеспечивает также и смену знака выходного сигнала например при переходе стрелы через горизонталь, когда величина h, меняет знак В сумматоре значения сигналов с датчиков сктадываются со своими знаками и подаются на показывающий прибор, который проградуирован в метрах либо имеет контрольную отметку, на которую настраивается стрелка прибора с помощью потенциометра 23 по достижении заданной глубины копания Последняя операция позволяет повысить чувствигпСбГ Р значительной глубине разрабатываемой транщеи При это длина шкалы прибора используется не на всю глубину разработки, а только на последние метр или два. Продольный наклон экскаватора воспринимается каждым датчиком так как при этом изменяется пространственное положение рабочих органов, а следовательно, и стрелы прогибов каждой из гибких пластин датчиков. Поперечный наклон экскаватора также не вносит ощибок в определении глубины копания, так как при этом увеличивается жесткость пластин в вертикальной плоскости, что влечет за собой уменьшение стрел прогибов, а следовательно, и уменьшение суммарного выходного сигнала. Уменьшение показаний прибора 31 при поп еречном наклоне экскаватора на fieкоторый угол пропорционально косинус этого угла, так как жесткость пластип в поперечной вертикальной плоскости изменяется по функции косинуса и в предельных случаях соответству-ет минимальной жесткости (абсолютно горизонтальная поверхность) и .максимальной жесткости (рабочее оборудование экскаватора находится в горизонтальной плоскости). Вышеописанные свойства позволяют изготавливать датчики абсолютно одинаковыми и настраивать устройство на любой тип экскаватора без изменения их механических параметров Возможность поворота и фиксирования всех корпусов датчиков на рабочих органах экскаватора под определенным vrюм например, по часовой стрелке позволяет получать сигнал, фиксирующий отклонение от траектории, наклоненной против часовой стрелки под тем же углом к горизонтали Ориентация продольных осей датчиков параллельно продольным осям рабочих элементов позволяет получать электрический сигнал, пропорциональный отклонениям режущей кромки от вертикали. Формула изобретения Устройство для измерения глубины копания экскаватора, включающее датчики положения, установленные на рабочих органах и подключенные через сумматор к регистрирующему устройству, нблок настройки, отли 1ающсеся тем, что, с целью повышения точности измерения, датчики поюжения выполнены в виде Ш-образной iiiacтины, средний лепесток которой выполнен укороченным с грузом, соед11пе1П1ым с по вижным контактом потенциометра, установленного на жестком кронштейне, закрепленном в уголках, а два крайних - лепестка ластины закреплены с помощью УГОЛКОВ а крышке датчика. Источники информации, принятые но шщание при экспертизе 1.Авторское свидетельство ,; 413378 л. ; 02 F 9,20, 1972. 2.Авторское свидетельство ,Ь -1039,)Г л. h 02 F 9/20, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода | 2019 |
|
RU2743981C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ГЛУБИНЫ КОНАНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU403951A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Рабочее оборудование экскаватора | 1985 |
|
SU1330271A1 |
| Устройство для разгрузки стрелы гидравлического экскаватора | 2022 |
|
RU2807273C1 |
| ЭНЕРГОСБЕРЕГАЮЩЕЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА С СОЧЛЕНЕННОЙ СТРЕЛОЙ | 2009 |
|
RU2425928C1 |
| Рабочее оборудование одноковшового экскаватора | 1985 |
|
SU1320341A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1988 |
|
SU1587149A1 |
/y.cC x x/x vyX4y: - xyyx v/.
