Область техники, к которой относится изобретение
Изобретение относится к строительным машинам, в частности, к системе контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода и может быть использована в качестве системы безопасности для оснащения землеройной техники для контроля приближения ковша к металлическим коммуникациям, например, трубопроводам, кабелям и так далее, при проведении землеройных вскрышных работ, например, в нефтяной и газовой промышленности.
Уровень техники
Известно устройство для измерения глубины копания экскаватора, включающее датчики положения, установленные на рабочих органах и подключенные через сумматор к регистрирующему устройству, и блок настройки, при этом датчики положения выполнены в виде Ш-образной пластины, средний лепесток которой выполнен укороченным с грузом, соединенным с подвижным контактом потенциометра, установленного на жестком кронштейне, закрепленном в уголках, а два крайних лепестка пластины закреплены с помощью уголков на крышке датчика (см. а.с. SU №684102, МПК E02F 9/20, опубл. 05.09.1979 г., бюл. №33).
Недостатком данного устройства является сложность конструкции, невысокая точность измерения глубины копания экскаватора.
Известна система для определения глубины копания одноковшовым экскаватором, включающая датчики положения стрелы и рукояти, сумматор и гидравлическое устройство управления экскаватором, при этом она содержит постоянное запоминающее устройство, задатчик предельной глубины копания, блок сравнения, задатчик длины режущей части ковша, блок индикации и генератор тактовых импульсов, причем последний подключен к синхронизирующим входам датчиков положения стрелы и рукояти, постоянного запоминающего устройства, сумматора, блока сравнения и блока индикации, выходы датчиков положения стрелы и рукояти подключены к соответствующим адресным входам постоянного запоминающего устройства, выход которого соединен с первым входом сумматора, ко второму входу которого подключен задатчик режущей части ковша, выход сумматора связан с входом блока индикации и первым входом блока сравнения, ко второму входу которого подключен задатчик предельной глубины копания, выход блока сравнения соединен с гидравлическим устройством управления экскаватором (см. а.с. SU №1476082, МПК E02F 9/20, опубл. 30.04.1989 г., бюл. №16).
Недостатком данной системы является сложность конструкции, высокая стоимость, невысокие точность и надежность работы экскаватора.
Известен экскаватор для вскрытия трубопроводов, включающий устройство управления приводом рабочего оборудования, имеющим исполнительные гидроцилиндры, соединенные через распределители для управления стрелой и рукоятью с насосом и моделирующим рычагом, имеющим привод перемещения, ограничитель и определитель глубины, связанные между собой, при этом привод моделирующего рычага выполнен в виде гидроцилиндров, установленных на моделирующем рычаге, и гидромоторов с преобразователями, установленных между распределителями для управления стрелой и рукоятью и исполнительными гидроцилиндрами рабочего оборудования, а преобразователи связаны с гидроцилиндрами, при этом между насосом и распределителем для управления стрелой установлен определитель глубины, выполненный в виде гидрораспределителя, корпус которого соединен с ограничителем глубины, а золотник - с моделирующим рычагом (см. пат. RU №2029828, МПК E02F 9/20, E02F 9/22, опубл. 27.02.1995 г.).
Недостатком данного экскаватора является сложность устройства управления приводом рабочего оборудования, невысокие точность и надежность работы экскаватора.
Наиболее близким по технической сущности и достигаемому положительному эффекту и принятое авторами за прототип является устройство контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, характеризующееся тем, что оно содержит закрепленную на стреле экскаватора и охватывающую ее передающую катушку индуктивности, соединенную с передатчиком электромагнитных колебаний, и охватывающую платформу экскаватора приемную катушку индуктивности, которая связана по магнитной цепи, образованной стрелой экскаватора, ковшом, зазором между ковшом и трубопроводом и пространством между трубопроводом и шасси экскаватора, с передающей катушкой и соединена с приемником-преобразователем, соединенным с узлом блокировки и сигнализации, воздействующим на исполнительный механизм экскаватора (см. пат. RU №2140493, МПК E02F 9/20, E02F 5/10, опубл. 27.10.1999 г.).
Недостатком данного устройства являются сложность технической реализации и последующего обслуживания, необходимость разработки множества вариантов устройства для установки его на различные типы землеройной техники, а также то, что оно выдает как звуковой, так и световой сигналы, при этом подача световых сигналов вынуждает оператора землеройной техники отвлекаться от управления экскаватором.
Раскрытие изобретения
Задачей предлагаемого изобретения является разработка системы контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, обладающей обеспечением непрерывного контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода или кабелем и своевременной подачи звуковых сигналов на динамик громкоговорителя в кабину оператора землеройной техники, что позволит ему оперативно корректировать свои действия с целью недопущения повреждения или нарушения изоляции трубопровода или кабеля.
Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к обеспечению непрерывного контроля расстояния между ковшом экскаватора и стенкой трубопровода или кабелем и подачи звуковых сигналов на динамик громкоговорителя в кабину оператора землеройной техники.
Технический результат достигается с помощью системы контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, включающей генератор электромагнитных колебаний, подключенный к трубопроводу, с возможностью образования между трубопроводом и элементами шасси экскаватора магнитной цепи, устройство звуковой сигнализации приближения, выполненное с возможностью передачи звукового сигнала на динамик громкоговорителя, установленный в кабине оператора, при этом устройство звуковой сигнализации приближения, выполнено в виде электронного блока, установленного на стреле экскаватора над ковшом и содержит идентичные вертикальный измерительный канал с антенной, установленной вертикально, и горизонтальный измерительный канал с антенной, установленной горизонтально, при этом антенна вертикального измерительного канала соединена с фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем, а амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера, при этом идентичная антенна горизонтального измерительного канала соединена с аналогичными фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем, а амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера, при этом управляющие выходы микроконтроллера соединены с программируемыми усилителями вертикального измерительного канала и горизонтального измерительного канала, также микроконтроллер соединен со входом усилителя низкой частоты, а, последний, соединен с динамиком громкоговорителя.
Таким образом, технический результат достигается с помощью системы контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода включающей генератор электромагнитных колебаний, подключенный к трубопроводу, с возможностью образования между трубопроводом и элементами шасси экскаватора магнитной цепи, устройство звуковой сигнализации приближения, выполненное с возможностью передачи звукового сигнала на динамик громкоговорителя, установленный в кабине оператора, причем генератор электромагнитных колебаний, подключенный к трубопроводу, используемому в качестве излучающей антенны, используют внешний, при этом устройство звуковой сигнализации приближения, выполнено в виде электронного блока, установленного на стреле экскаватора над ковшом и содержит идентичные вертикальный измерительный канал с антенной, установленной вертикально, и горизонтальный измерительный канал с антенной, установленной горизонтально, при этом антенна вертикального измерительного канала соединена с фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем, а амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера, при этом идентичная антенна горизонтального измерительного канала соединена с аналогичными фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем, а амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера, при этом управляющие выходы микроконтроллера соединены с программируемыми усилителями вертикального измерительного канала и горизонтального измерительного канала, также микроконтроллер соединен со входом усилителя низкой частоты, а, последний, соединен с динамиком громкоговорителя посредством гибкого кабеля.
Краткое описание чертежей и иных материалов
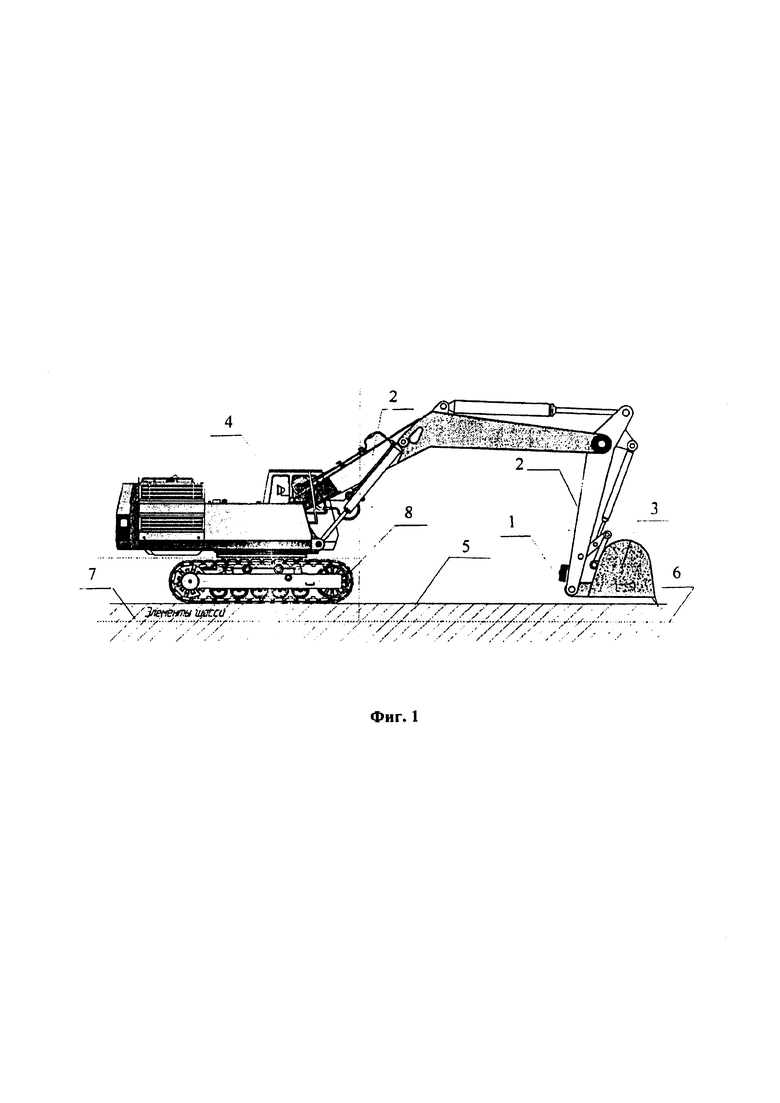
На фиг. 1 дана система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, схема установки на экскаватор системы контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, общий вид.
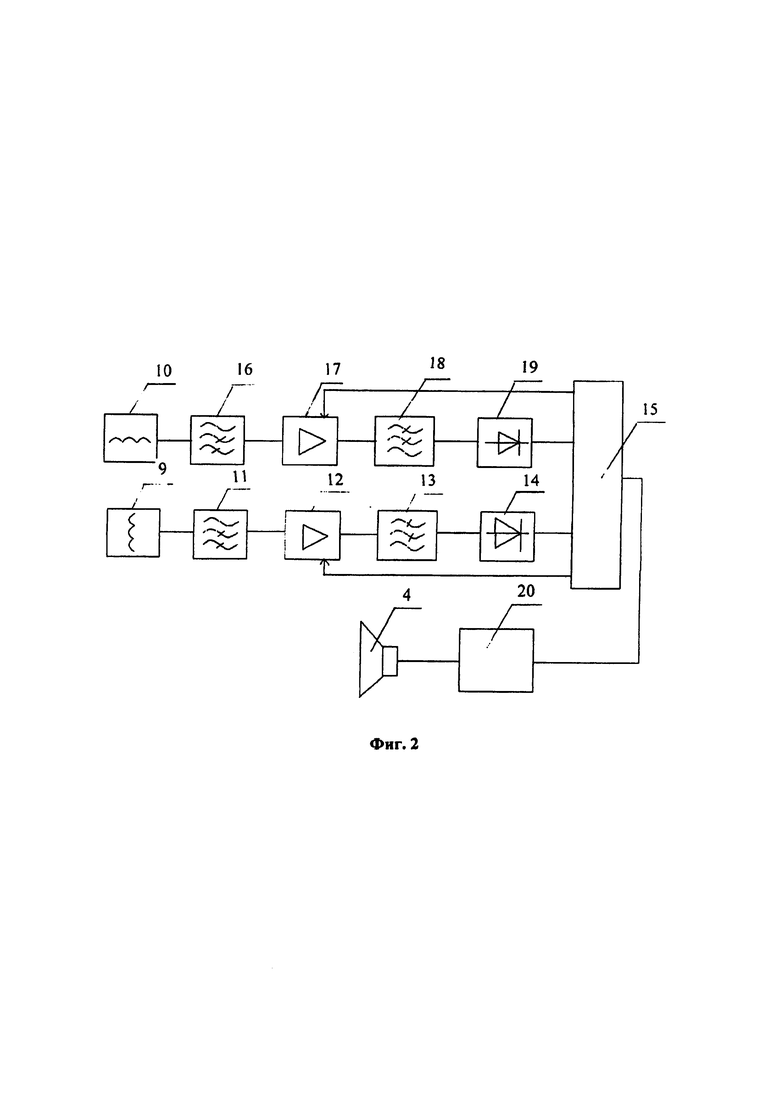
На фиг. 2, тоже, дана структурная схема системы контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода.
Осуществление изобретения
Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода включает внешний генератор электромагнитных колебаний (на фиг. не показан), подключенный к искомой инженерной коммуникации, и состоит из устройства звуковой сигнализации приближения выполненного в виде электронного блока 1, установленного на стреле 2 экскаватора (на фиг. не обозначен) над ковшом 3 экскаватора, например, с помощью магнитных креплений (на фиг. не показаны), так, чтобы исключить задевание электронного блока 1 движущимися частями экскаватора или содержимым ковша 3 экскаватора, динамика громкоговорителя 4, установленного в кабине (на фиг. не обозначена) экскаватора, соединенного с электронным блоком 1 посредством одного гибкого четырехжильного кабеля (на фиг. не показан), на который подаются звуковые сигналы, питаются электронный блок 1 и громкоговоритель 4 от бортовой шины питания (на фиг. не показана) экскаватора напряжением 12 или 24 вольта, причем пространство (на фиг. не обозначено) между трубопроводом 5 и элементами шасси (на фиг. не обозначены) образуют магнитную цепь, при этом в электронном блоке 1 расположены два идентичных измерительных канала 6 и 7, отличающихся способом установки электромагнитных антенн (на фиг. не обозначены); измерительный канал, имеющий вертикально установленную антенну, называется вертикальным измерительным каналом 6, а измерительный канал 7 имеет горизонтально установленную антенну и называется горизонтальным измерительным каналом 7, при этом вертикальный измерительный канал 6 соединен с фильтром высокой частоты (ФВЧ) 8, который соединен с программируемым усилителем (ПУ) 9, последний соединен с фильтром низкой частоты (ФНЧ) 10, который затем соединен с амплитудным выпрямителем 11, а амплитудный выпрямитель 11 соединен со входом аналого-цифрового преобразователя микроконтроллера (МК) 12, а горизонтальный измерительный канал 7 соединен с аналогичным фильтром высокой частоты (ФВЧ) 13, который соединен с программируемым усилителем (ПУ) 14, последний соединен с фильтром низкой частоты (ФНЧ) 15, который затем соединен с амплитудным выпрямителем 16, а амплитудный выпрямитель 16 соединен со входами аналого-цифрового преобразователя микроконтроллера (МК) 12, при этом МК 12 соединен с ПУ 9 и с ПУ 14 и соединен с усилителем низкой частоты (УНЧ) 17, который затем соединен с динамиком громкоговорителя 4.
Систему контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода эксплуатируют следующим образом.
Принцип действия системы контроля расстояния между ковшом 3 экскаватора и поверхностью стенки трубопровода 5 основан на явлении электромагнитной индукции (см. фиг. 1, 2), вертикальный и горизонтальный измерительные каналы 6 и 7 обнаруживают переменное электромагнитное поле, которое возникает вокруг искомого трубопровода 5 или кабеля, выступающего в роли излучающей антенны, при подключении к нему внешнего генератора электромагнитных колебаний. Сигнал, наводимый на антенны, установленные в вертикальном и горизонтальном измерительных каналах 6 и 7, подвергается фильтрации ФВЧ 8 и 11, усилению ПУ 9 и 14, фильтрации по низкой частоте фильтрами 10 и 15 и выпрямлению амплитудными выпрямителями 11 и 16. Напряжение постоянного тока после амплитудных выпрямителей 11 и 16, пропорциональное амплитуде электромагнитного излучения трубопровода 5 или кабеля в месте нахождения электронного блока 1, подают на входы аналого-цифрового преобразователя микроконтроллера 12, МК 12 выполняет их обработку. Система контроля расстояния между ковшом 3 экскаватора и поверхностью стенки трубопровода 5 работает в трех режимах:
- Режим поиска коммуникации;
В этом режиме МК 12 использует сигнал, принимаемый антенной вертикального измерительного канала 6, для поиска коммуникации по минимуму сигнала. При расположении стрелы 2 экскаватора с установленным на ней электронным блоком 1 непосредственно над осью искомой коммуникации на выходе вертикального измерительного канала 6 формируется ярко выраженный минимум сигнала по сравнению с сигналом, формируемым при некотором удалении электронного блока 1 от оси коммуникации. МК 12 непрерывно анализирует изменения уровня сигнала вертикального измерительного канала 6 и вырабатывает импульсы определенной частоты звукового диапазона, пропорциональной величине выходного сигнала вертикального измерительного канала 6, эти звуковые импульсы подают на УНЧ 17 и, далее, на динамик громкоговорителя 4; таким образом, плавно перемещая стрелу 2 экскаватора поперек искомой коммуникации, оператор будет слышать звуковые импульсы с меняющимися частотой следования и тональностью. Импульсы наиболее низкой тональности будут соответствовать минимуму выходного сигнала вертикального измерительного канала 6, что будет свидетельствовать о расположении стрелы 2 экскаватора непосредственно над осью искомой коммуникации. После этого стрела 2 фиксируется в горизонтальной плоскости, и осуществляется переход к этапу калибровки.
Уровень сигнала горизонтального измерительного канала 7 в режиме поиска коммуникации используется для установления коэффициента усиления программируемых усилителей 9 и 14. При расположении электронного блока 1 непосредственно над осью коммуникации на выходе горизонтального измерительного канала 7 формируется максимум постоянного напряжения. Воздействуя на программируемые усилители 9 и 14, МК 12 устанавливает для них такие коэффициенты усиления, чтобы выходные сигналы вертикального и горизонтального измерительных каналов 6 и 7 всегда были в пределах допустимого динамического диапазона. После данного этапа коэффициенты усиления фиксируются и остаются неизменными до следующего поиска коммуникации.
- Режим калибровки электронного блока 1;
В этом режиме электронный блок 1, находящийся над осью коммуникации, располагают непосредственно над землей (в случае поиска кабеля) или поднимают над землей на высоту, равную половине диаметра трубопровода 5 (в случае поиска трубопровода 5). МК 12 заносит в память полученный уровень выходного сигнала горизонтального измерительного канала 7 в нижней точке калибровки, после чего стрелу 2 с электронным блоком 1 поднимают вертикально на 50 сантиметров относительно предыдущего положения и МК 12 фиксирует уровень выходного сигнала горизонтального измерительного канала 7 в верхней точке калибровки, далее они используются для определения глубины залегания коммуникации. Одновременно МК 12 рассчитывает уровень сигнала, который сформировался бы на выходе горизонтального измерительного канала 7, если бы расстояние между ковшом 3 экскаватора и поверхностью стенки трубопровода 5 (или кабелем) стало равно нулю; этот максимальный уровень сигнала используют микроконтроллером 12 при работе системы контроля расстояния между ковшом 3 экскаватора и поверхностью стенки трубопровода 5 в основном режиме.
- Основной режим;
После калибровки система контроля расстояния между ковшом 3 экскаватора и поверхностью стенки трубопровода 5 переходит в основной режим работы. Уровни выходных напряжений вертикального и горизонтального измерительных каналов 6 и 7 суммируются геометрически, МК 12 отслеживает текущие напряжения, сравнивает их с записанным в память максимальным уровнем и формирует звуковые импульсы, меняющиеся по тональности и по частоте следования в зависимости от полученной векторной суммы сигналов вертикального и горизонтального измерительных каналов 6 и 7.
При этом система контроля расстояния между ковшом 3 экскаватора и поверхностью стенки трубопровода 5 имеет некоторые особенности:
- с целью обострения восприятия оператором землеройной техники применяется преобразование изменения амплитуды сигналов, принимаемых антеннами измерительных каналов 6 и 7, в изменение частоты следования и тональности звуковых сигналов, воспроизводимых громкоговорителем 4, поскольку известно, что рост амплитуды звука, человек может заметить только при изменении на 10-15%, а изменение частоты звука фиксируется при 0,3%; диапазон изменения определяется МК 12 системы в процессе калибровки;
- с целью минимизации отвлечения оператора землеройной техники, оповещение оператора о приближении ковша 3 экскаватора к стенке трубопровода 5 или кабелю производится только звуковым сигналом;
- обязательное проведение начальной калибровки электронного блока 1 перед проведением землеройных работ.
Предлагаемое изобретение по сравнению с прототипом и другими известными техническими решениями имеет следующие преимущества:
- система обеспечивает контроль расстояния между ковшом экскаватора и стенкой трубопровода путем своевременной подачи звуковых импульсов на усилитель низкой частоты и, затем, на динамик громкоговорителя;
- минимизирует отвлечение оператора землеройной техники, оповещая его о приближении к искомой коммуникации только звуковым сигналом;
- благодаря применению постоянных магнитов в качестве креплений обеспечивается простота монтажа устройства;
- система может применяться с любыми одноковшовыми экскаваторами без внесения каких-либо изменений в конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода и способ для его осуществления | 2019 |
|
RU2710233C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ КАБЕЛЬНЫХ ЛИНИЙ | 2022 |
|
RU2806079C1 |
| Измерительный комплекс для поиска и диагностики подземных коммуникаций | 2018 |
|
RU2687236C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2379579C1 |
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ КОВШОМ ЭКСКАВАТОРА И ПОВЕРХНОСТЬЮ СТЕНКИ ТРУБОПРОВОДА | 1997 |
|
RU2140493C1 |
| ПОРТАТИВНАЯ КОРОТКОВОЛНОВАЯ - УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2823629C1 |
| Радиотелеметрическое устройство контроля и учета работы шагающего экскаватора | 1987 |
|
SU1472573A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО БЕСКОНТАКТНОГО КОНТРОЛЯ БЕТОННЫХ И ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2022 |
|
RU2801787C1 |
Изобретение относится к системе контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода. Техническим результатом является обеспечение непрерывного контроля расстояния между ковшом экскаватора и стенкой трубопровода или кабелем и подачи звуковых сигналов на динамик громкоговорителя в кабину оператора землеройной техники. Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода включает генератор электромагнитных колебаний, подключенный к трубопроводу, с возможностью образования между трубопроводом и элементами шасси экскаватора магнитной цепи, устройство звуковой сигнализации приближения, выполненное с возможностью передачи звукового сигнала на динамик громкоговорителя, установленный в кабине оператора. Устройство звуковой сигнализации приближения выполнено в виде электронного блока, установленного на стреле экскаватора над ковшом и содержит идентичные вертикальный измерительный канал с антенной, установленной вертикально, и горизонтальный измерительный канал с антенной, установленной горизонтально, антенна вертикального измерительного канала соединена с фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем. Амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера, идентичная антенна горизонтального измерительного канала соединена с аналогичными фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем, а амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера. Управляющие выходы микроконтроллера соединены с программируемыми усилителями вертикального измерительного канала и горизонтального измерительного канала, также микроконтроллер соединен со входом усилителя низкой частоты, а последний соединен с динамиком громкоговорителя. 2 ил.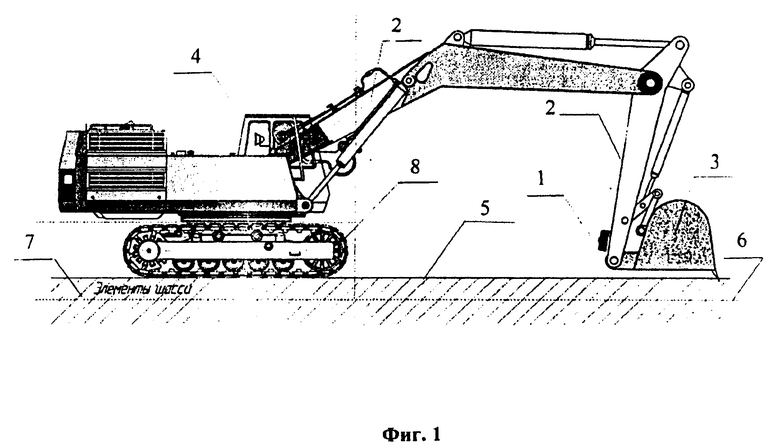
Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, включающая генератор электромагнитных колебаний, подключенный к трубопроводу, с возможностью образования между трубопроводом и элементами шасси экскаватора магнитной цепи, устройство звуковой сигнализации приближения, выполненное с возможностью передачи звукового сигнала на динамик громкоговорителя, установленный в кабине оператора, отличающееся тем, что устройство звуковой сигнализации приближения выполнено в виде электронного блока, установленного на стреле экскаватора над ковшом, и содержит идентичные вертикальный измерительный канал с антенной, установленной вертикально, и горизонтальный измерительный канал с антенной, установленной горизонтально, при этом антенна вертикального измерительного канала соединена с фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем, а амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера, при этом идентичная антенна горизонтального измерительного канала соединена с аналогичными фильтром высокой частоты, который соединен с программируемым усилителем, последний соединен с фильтром низкой частоты, который затем соединен с амплитудным выпрямителем, а амплитудный выпрямитель соединен со входом аналого-цифрового преобразователя микроконтроллера, при этом управляющие выходы микроконтроллера соединены с программируемыми усилителями вертикального измерительного канала и горизонтального измерительного канала, также микроконтроллер соединен со входом усилителя низкой частоты, а последний соединен с динамиком громкоговорителя.
| УСТРОЙСТВО КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ КОВШОМ ЭКСКАВАТОРА И ПОВЕРХНОСТЬЮ СТЕНКИ ТРУБОПРОВОДА | 1997 |
|
RU2140493C1 |
| Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами | 2017 |
|
RU2683451C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАССЫ ПОДЗЕМНОЙ МЕТАЛЛИЧЕСКОЙ ЛИНИИ | 2005 |
|
RU2302649C2 |
| 1972 |
|
SU416435A1 | |
| US 6541976 B1, 01.04.2003. | |||

