Изобретение относится к устройствам для автоматического регулирования положения рабочего органа строительных машин и может быть использовано в землеройных машинах, предназначенных для отрывки котлованов над подземными токо- проводящими коммуникациями, в частности в гидравлических экскаваторах.
Цель изобретения - повышение надежности .за счет исключения динамических воздействий.
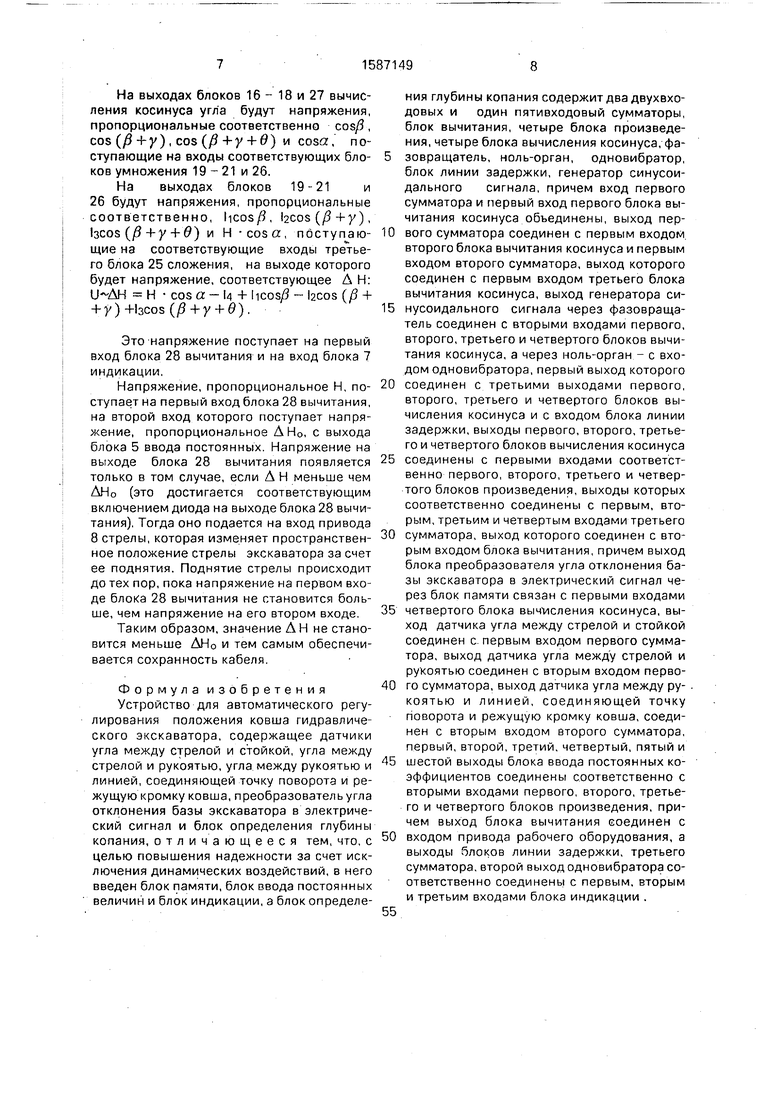
На фиг. 1 даны структурная схема и блок-схема устройства для автоматического регулирования положения ковша: на фиг. 2- структурная схема блока определения глубины копания.
Для определения положения ковша определяется угол наклона базы экска ватора к горизонту, а также углы между соответствующими элементами рабочего оборудования экскаватора и по полученным данным вычисляется расстояние между режущей кромкой ковша и кабелем по формуле А Н Н COS а - 1/1 Ч- li COS/S - -l2 cos(-by) + l3Cos(/3+y-f0), где Н - глубина залегания кабеля в грунте; li, 2,1з-длина стрелы, рукояти и ковша соответственно (расстояние от точки поворота ковша до его режущей кромки);
14 - расстояние от точки подвеса рабочего оборудования до дневной поверхности грунта;
а - угол наклона базы экскаватора относительно горизонта;
Р - угол между стрелой и стойкой, к которой подвешивается рабочее оборудова ние;
у- угол между стрелой и рукоятью;
в- угол между рукоятью и линией, соединяющей точку поворота ковша и режущую кромку ковша.
Устройство содержит датчик 1 угла между стрелой и стойкой, к которой подвешено рабочее оборудование, датчик 2 угла между стрелой и рукоятью, датчик 3 угла между рукоятью и линией, соединяющей точку поворота и режущую кромку ковша, преобразователь 4 угла отклонения базы экскаватора в электрический сигнал, блок 5 ввода постоянных, блок 6 0 определения глубины копания, блок 7 индикации, привод 8 рабочего оборудования, блок 9 памяти, гидравлический экскаватор 10 и кабель 11.
Выход датчика 1 угла между стрелой и 5 стойкой, к которой подвешено рабочее оборудование, подключен к второму входу блока 6 определения глубины копания. Выход датчика 2 угла между стрелой и рукоятью подключен к третьему входу блока 6 опреде- 0 ления глубины копания. Выход датчика 3 угла между рукоятью и линией, соединяющей точку поворота ковша с режущей кром-. кой ковша, подключен к четвертому входу блока 6 определения глубины копания. 5Выход преобразователя 4 угла отклонения базы экскаватора в электрический сигнал через блок 9 памяти подключен к первому входу блока определения глубины копания. Первый - шестой выходы блока 5 0 ввода постоянных подключены соответственно к пятому - десятому входам блока 6 определения глубины копания.
Первый выход блока 6 определения глубины копания подключен к входу привода 8 5 рабочего оборудования. Второй - четвертый выходы блока 6 определения глубины копания подключены соответственно к первому- третьему входам блока 7 индикации.
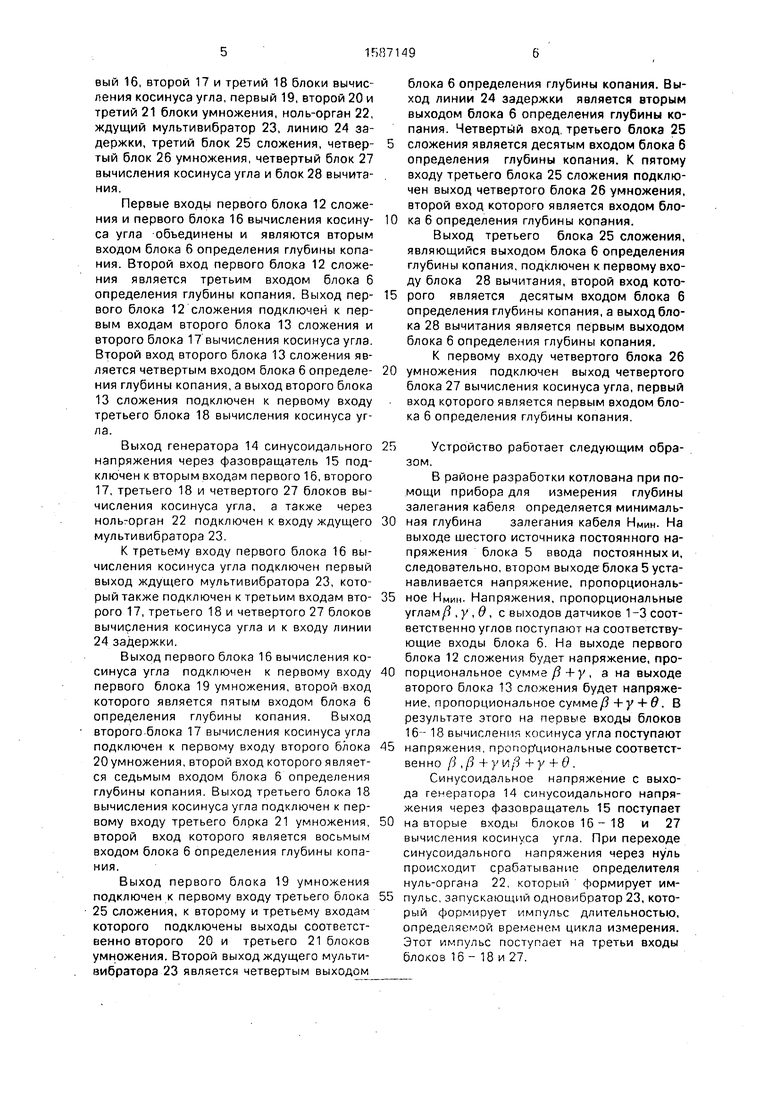
Блок 6 содержит первый 12 и второй 13 40 блоки сложения, генератор 14 синусоидального напряжения, фазовращатель 15, первый 16, второй 17 и третий 18 блоки вычисления косинуса угла, первый 19, второй 20 и третий 21 блоки умножения, ноль-орган 22, ждущий мультивибратор 23, линию 24 задержки, третий блок 25 сложения, четвертый блок 26 умножения, четвертый блок 27 вычисления косинуса угла и блок 28 вычитания.
Первые входы первого блока 12 сложения и первого блока 16 вычисления косинуса угла объединены и являются вторым входом блока 6 определения глубины копания. Второй вход первого блока 12 сложения является третьим входом блока 6 определения глубины копания. Выход первого блока 12 сложения подключен к первым входам второго блока 13 сложения и второго блока 17 вычисления косинуса угла. Второй вход второго блока 13 сложения является четвертым входом блока 6 определения глубины копания, а выход второго блока 13 сложения подключен к первому входу третьего блока 18 вычисления косинуса угла.
Выход генератора 14 синусоидального напряжения через фазовращатель 15 подключен к вторым входам первого 16, второго 17, третьего 18 и четвертого 27 блоков вычисления косинуса угла, а также через ноль-орган 22 подключен к входу ждущего мультивибратора 23.
К третьему входу первого блока 16 вычисления косинуса угла подключен первый выход ждущего мультивибратора 23, который также подключен к третьим входам второго 17,третьего 18 и четвертого 27 блоков вычисления косинуса угла и к входу линии
24задержки.
Выход первого блока 16 вычисления косинуса угла подключен к первому входу первого блока 19 умножения, второй вход которого является пятым входом блока 6 определения глубины копания. Выход второго.блока 17 вычисления косинуса угла подключен к первому входу второго блока 20 умножения, второй вход которого является седьмым входом блока 6 определения глубины копания. Выход третьего блока 18 вычисления косинуса угла подключен к первому входу третьего блрка 21 умножения, второй вход которого является восьмым входом блока 6 определения глубины копания.
Выход первого блока 19 умножения подключен к первому входу третьего блока
25сложения, к второму и третьему входам которого подключены выходы соответственно второго 20 и третьего 21 блоков умножения. Второй выход ждущего мультивибратора 23 является четвертым выходом
блока 6 определения глубины копания. Выход линии 24 задержки является вторым выходом блока 6 определения глубины копания. Четвертой вход, третьего блока 25
сложения является десятым входом блока б определения глубины копания. К пятому входу третьего блока 25 сложения подключен выход четвертого блока 26 умножения, второй вход которого является входом блока 6 определения глубины копания.
Выход третьего блока 25 сложения, являющийся выходом блока 6 определения глубины копания, подключен к первому входу блока 28 вычитания, второй вход которого является десятым входом блока б определения глубины копания, а выход блока 28 вычитания является первым выходом блока 6 определения глубины копания. К первому входу четвертого блока 26
умножения подключен выход четвертого блока 27 вычисления косинуса угла, первый вход которого является первым входом блока 6 определения глубины копания.
25
Устройство работает следующим образом.
В районе разработки котлована при помощи прибора для измерения глубины залегания кабеля определяется минимальная глубина залегания кабеля Нмин. На выходе шестого источника постоянного напряжения блока 5 ввода постоянных и, следовательно, втором выходе блока 5 устанавливается напряжение, пропорциональное Нмин. Напряжения, пропорциональные углам/9 , у , , с выходов датчиков 1-3 соответственно углов поступают на соответствующие входы блока 6. На выходе первого блока 12 сложения будет напряжение, пропорциональное сумме/ -Ьу, а на выходе второго блока 13 сложения будет напряжение, пропорциональное сумме й +у + в. В результате этого на (тервые входы блоков 18 вычисления косинуса угла поступают
напряжения, пропор циональные соответственно /,/5 -Ьун/З +у+ 0.
Синусоидальное напряжение с выхода генератора 14 синусоидального напряжения через фазовращатель 15 поступает
на вторые входы блоков 16-18 и 27 вычисления косинуса угла. При переходе синусоидального напряжения через нуль происходит срабатывание определителя нуль-органа 22, который формирует импульс, запускающий одновибратор 23, который формирует импульс длительностью, определяемой временем цикла измерения. Этот импульс поступает на третьи входы блоков 16- 18 и 27.
На выходах блоков 16 - 18 и 27 вычисления косинуса угла будут напряжения, пропорциональные соответственно cosyS, cos(;3+y), cos() + 0) и cosa, поступающие на входы соответствующих блоков умножения 19-21 и 26.
На выходах блоков 19-21 и 26 будут напряжения, пропорциональные соответственно, hcos/J, l2Cos(/3+y), Iscos (/5-fy+) и Н cos а , поступающие на соответствующие входы третьего блока 25 сложения, на выходе которого будет напряжение, соответствующее Д Н: и-Дн Н cos а - 14 Н- Исоз/З - hcos (/3 + + Y}+hcos(+Y + e}.
Это напряжение поступает на первый вход блока 28 вычитания и на вход блока 7 индикации,
Напряжение, пропорциональное Н, поступает на первый вход блока 28 вычитания, на второй вход которого поступает напряжение, пропорциональное А Но, с выхода блока 5 ввода постоянных. Напряжение на выходе блока 28 вычитания появляется только в том случае, если A Н меньше чем АНо (это достигается соответствующим включением диода на выходе блока 28 вычитания). Тогда оно подается на вход привода 8 стрелы, которая изменяет пространственное положение стрелы экскаватора за счет ее поднятия. Поднятие стрелы происходит до тех пор, пока напряжение на первом входе блока 28 вычитания не становится больше, чем напряжение на его втором входе.
Таким образом, значение АН не становится меньше АНо и тем самым обеспечивается сохранность кабеля.
Формула изобретения Устройство для автоматического регулирования положения ковша гидравлического экскаватора, содержащее датчики угла между стрелой и стойкой, угла между стрелой и рукоятью, угла между рукоятью и линией, соединяющей точку поворота и режущую кромку ковша, преобразователь угла отклонения базы экскаватора в электрический сигнал и блок определения глубины копания, отличающееся тем, что, с целью повышения надежности за счет исключения динамических воздействий, в него введен блок памяти, блок ввода постоянных величий и блок индикации, а блок определения глубины копания содержит два двухвхо- довых и один пятивходовый сумматоры, блок вычитания, четыре блока произведения, четыре блока вычисления косинуса, фазовращатель, ноль-орган, одновибратор, блок линии задержки, генератор синусоидального сигнала, причем вход первого сумматора и первый вход первого блока вычитания косинуса объединены, выход первого сумматора соединен с первым входом, второго блока вычитания косинуса и первым входом второго сумматора, выход которого соединен с первым входом третьего блока вычитания косинуса, выход генератора синусоидального сигнала через фазовращатель соединен с вторыми входами первого, второго, третьего и четвертого блоков вычитания косинуса, а через ноль-орган - с входом одновибратора, первый выход которого
соединен с третьими выходами первого, второго, третьего и четвертого блоков вычисления косинуса и с входом блока линии задержки, выходы первого, второго, третьего и четвертого блоков вычисления косинуса
соединены с первыми входами соответственно первого, второго, третьего и четвертого блоков произведения, выходы которых соответственно соединены с первым, вторым, третьим и четвертым входами третьего
сумматора, выход которого соединен с вторым входом блока вычитания, причем выход блока преобразователя угла отклонения базы экскаватора в электрический сигнал через блок памяти связан с первыми входами
четвертого блока вычг сления косинуса, выход датчика угла между стрелой и стойкой соединен с. первым входом первого сумматора, выход датчика угла между стрелой и рукоятью соединен с вторым входом первого сумматора, выход датчика угла между рукоятью и линией, соединяющей точку rioBOpoTa и режущую кромку ковша, соединен с вторым входом второго сумматора, первый, второй, третий, четвертый, пятый и
шестой выходы блока ввода постоянных коэффициентов соединены соответственно с вторыми входами первого, второго, третьего и четвертого блоков произведения, причем выход блока вычитания соединен с
входом привода рабочего оборудования, а выходы блоков линии задержки, третьего сумматора, второй выход одновибратора соответственно соединены с первым, вторым и третьим входами блока индикации .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для управления движением самоходного кабелеукладчика | 1986 |
|
SU1368861A1 |
| Способ определения высоты точки подвеса рабочего оборудования землеройной машины после ее переезда относительно дна разрабатываемой траншеи с продольным уклоном | 1989 |
|
SU1740570A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Система управления глубиной копания землеройной машины | 1988 |
|
SU1661302A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
Изобретение относится к автоматическому регулированию положения рабочего органа строительных и землеройных машин для отрывки котлованов над подземными токопроводящими коммуникациями. Цель изобретения - повышение надежности за счет исключения динамических воздействий. Устройство состоит из датчиков 1,2 и 3 соответственно угла β между стрелой и стойкой, угла γ между стрелой и рукоятью и угла Θ между рукоятью и линией, соединяющей точку поворота и режущую кромку ковша, преобразователя 4 угла α отношения базы экскаватора 10 в электрический сигнал, блока 5 ввода постоянных, блока 6 определения глубины копания, блока 7 индикации, привода 8 рабочего оборудования, блока 9 памяти и кабеля 11. Конструкция блока 6 позволяет вычислять расстояние ΔН между режущей кромкой ковша и кабелем 11 по выведенной зависимости: ΔН=H .COSΑ-L 4+L 1COSΒ-L 2COS(Β+*98Г)+L 3COS(Β+*98Г+Θ), где H - глубина залегания кабеля 11 в грунте, L 1, L 2, L 3 - соответственно длина стрелы, рукояти и ковша (расстояние от точки поворота ковша до его режущей кромки)
L 4 - расстояние от точки подвеса рабочего оборудования до дневной поверхности. Величина ΔН сравнивается с величиной ΔН 0, заданной в блоке 5, и по величине рассогласования формируется управляющий сигнал на привод 8 и сигналы индикации на блок 7. 2 ил.
| Патент США №3917411 | |||
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
