(54) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления локомотивом | 1976 |
|
SU647162A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ КОММУТИРУЮЩИМАППАРАТОМ | 1971 |
|
SU299391A1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств. | 2019 |
|
RU2720390C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств | 2019 |
|
RU2720597C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| СЕЛЕКТОР РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2013 |
|
RU2551786C1 |
| Переключающее устройство кулачкового контролера двухстороннего действия | 1974 |
|
SU491498A1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
| КОНТРОЛЛЕР | 2005 |
|
RU2286898C1 |
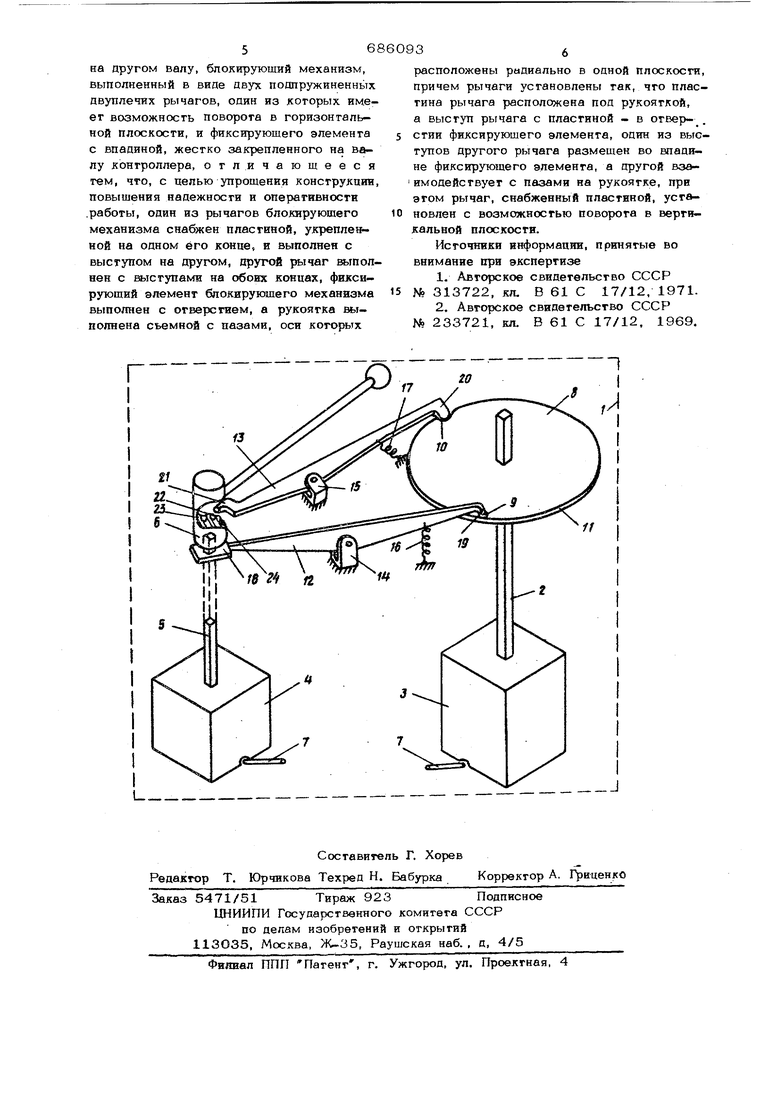
Изобретение относится к области автоматических устройств дистанционного уп- ршвпевия транспортными средствами, в частности тепловозом. Известно устройство для дистаниионного управления тепловозом, имеющее пневматический привод контроллера и реверсора l. Однако это устройство имеет сложную конструкцию и большие габариты. Сложная кинематика устройства повышает его инерционность, что недопустимо в ава рийных ситуациях. Известно также устройство для дистан пионного управления транспортным средством, содержащее блок управления, уста новленный на валу, рукоятку, контроллер установленный на другом валу, блокирующий механизм, выполненный в виде двух подпружиненных двуплечих рычагов, один из которых имеет возможность поворота в горизонтальной плоскости, и фиксируюшего элемента с впадиной, жестко зак репленного на валу контроллера 2. Наличие в таком устройстве большого количества кинематических связей механических элементов с приводом от пневмоцилиндра значительно усложняет конструкцию устройства и снижает надежность его работы. Кроме того, сложная кинематика устройства увеличивает промежуток времени от подачи сигнала управления до его исполнения, что обуславливает высокую инерционность устройства. Целью изобретения является упрощенна конструкции, повышение надежности и оперативности работы устройства. Поставленная цель достигается тем, что в устройстве для дистанционного управления транспортным средством, содержа1дем блок управления, установленный на валу, рукоятку, контроллер, установленный на другом валу, блокирующий механизм, выполненный в виде двух подпружиненных двуплечих рычагов, один из которых имеет возможность поворота в горизонтальной плоскости, и фиксирующего элемента с впадиной, жестко закрап- пенного на валу контроллера, один из ры чагов блокирующего механизма снабжен пластиной, укрепленной на одном его кон це, и выполнен с выступом на другом, другой рычаг выполнен с выступами на обоих концах, фиксирующий элемент блокирующего механизма выполнен с отверстием, а рукоятка выполнена сьемной с пазами, оси которых расположены радиально в одной плоскости. Причем рычаги установлены так, что пластина рычага расположена под рукояткой, а выступ этого рычага - в отверютии фиксирующего элемента, один из выступов другого рычага размешен во впадине фиксирующего эле- мента, а другой взаимодействует с паза ми на рукоятке, при этом рычаг, снабжен ный пластиной, установлен с возможностью поворота в вертикальной плоскости. На чертеже изображена кинематическая схема предлагаемого устройства. Устройство выполнено в виде пульта 1 содержащего укрепленный на валу 2 контроллер 3 и блок 4 управления реверсором (не показан на чертеже), снабженный .валом 5, на котором размещена сьемная рукоятка 6 реверсора, предназначенного для задания направления движения транспортному средству. Контроллер предета& ляет собой галетный переключатель, блок утфавления реверсором - пакетный переключатель, соединенные кабелем 7 с элек грической схемой управления исполнитель ными механизмами тепловоза (на чертеж не показаны). Сечение валов 2 и 5 выпо нено в форме многоугольника. На валу 2 жестко закреплен фикисрующий элемент 8 с отверстием 9 и впадиной 10 на то це 11. Двуплечие рычаги 12 и 13 установле ны соответственно на осях 14 и 15 и подпружинены пружинами 16 и 17. Один конец рычага 12 снабжен горизонтальной пластиной 18, расположенной под рукояткой 6 реверсора и воспринимающей ее давление. Другой конец рычага 12 окай чивается выступом 19, предназначенным для блокировки фиксирующего элемента 8 посреиством взаимодействия с отверстием 9. Концы рычага 13 снабжены вы тупами 2О к 21. Выступ 2О, скользящи по горцу 11 фиксирующего элемента, пре назначен для фиксирования нулевой позиции контроллера, а выступ 21, выпол ненный, например в виде штыря, - для взаимодействия с радиальными пазами 22, 23, 24. Эти пазы выполнены в рукоятке 6 реверсора в одной горизонтальной плоскости и расположены радиально. Устройство работает следующим образом. Рукоятку 6 реверсора надевают на вал 5 блока 4 управления реверсором с установкой в одно из положений: назад или вперед. При этом вес рукоятки воздей ствует на пластину 18 рычага 12. Рычаг 12, преодолевая сопротивление пружины 16, поворачивается относительно оси 14 и выводит выступ 19 из зацепления с отверстием 9 фиксирующего элемента 8 контроллера 3, что позволяет контроллеру поворачиваться при наборе позиций. Сигнал о набранных позициях контроллера и о положении рукоятки реверсора подается по кабелю 7 на исполнительные механизмы тепловоза. С поворотом контроллера 3 хотя бы на одну позицию выступ 20 рычага 13 выходит из внадины 10 и скользит по торцу 11 фиксирующего элемента 8. Когда выступ 2О попадает на торец 11, го рычаг 13, преодолевая сЛтротивление пру- жвйы 17, поворачивается относительно оси 15 на расстояние, равное глубине впадинькЮ, и выступом 21 входит в ооно из трех отверстий (22, 23, 24) в рукоятке 6 реверсора, устраняя возможность поворота и снятия рукоятки при набранных позициях контроллера. При установке контроллера 3 в нулевую позицию выступ 2О рычага 13 входит во впадину 1О фиксаруюшего элемента 8, а Изю- туп 21 ВЫХОДИТ из соответствующего отверстия (22, 23 и 24), освобождая рукоятку реверсора. При снятии рукоятки 6 реверсора пластина 18 освобождается от ее веса и рычаг 12 под действием пружины 16 по ворачивается, попадая выступом 19 в огверстие 9 и фиксируя положение контроллера в нулевой позиции. Таким образом, установить рукоятку 6 на вал 5 блока 4 управления реверсо. ром и снять ее с вала 5 представляется возможным только в нулевой позиции контроллера и нейтральном положении реверсора. Формула изобретения Устройство для дистанционного управления транспортным средством, содержащее блок управления, установленный на валу, рукоятку, контроллер, установленный
