Изобретение относится к области железнодорожного транспорта и касается конструкции устройств систем управления транспортными средствами, в частности локомотивами.
Известно устройство для дистанционного управления локомотивом, содержащее связанный с цепями управления пневматический привод контроллера машиниста, на поворотном валу которого жестко закреплены храповые колеса, управляемые защелками,выполненными в виде двуплечих рычагов, и приводными щтоками пневматических цилиндров привода (1.
Недостатком этого устройства является наличие большого числа узлов, а следовательно, его больщие габариты и вес.
Известно устройство для дистанционного управления тепловозом, содержащее соединенные с переносным пультом пневмопривод поворота вала реверсора, пневмопривод поворота вала контроллера машиниста, взаимодействующий посредством толкателей с установленным на валу контроллера храповиком, и механизм быстрого сброса позиций контроллера 2J.
Недостатком указанного устройства является повь1шеннь1Й износ узлов привода, Цель изобретения - упрощение устройства и повышение его надежности.
Для этого пневмопривод поворота вала контроллера выполнен в.виде друхпорщйево го цилиндра, щтоки поршней которого Ьбращены навстречу друг другу, при этом внутри корпуса цилиндра закреплены упоры и подвижная относительно них обойма, охватывающая концы штоков порщней и выполненная с продольным пазом и боковыми отверстиями для прохода толкателей.
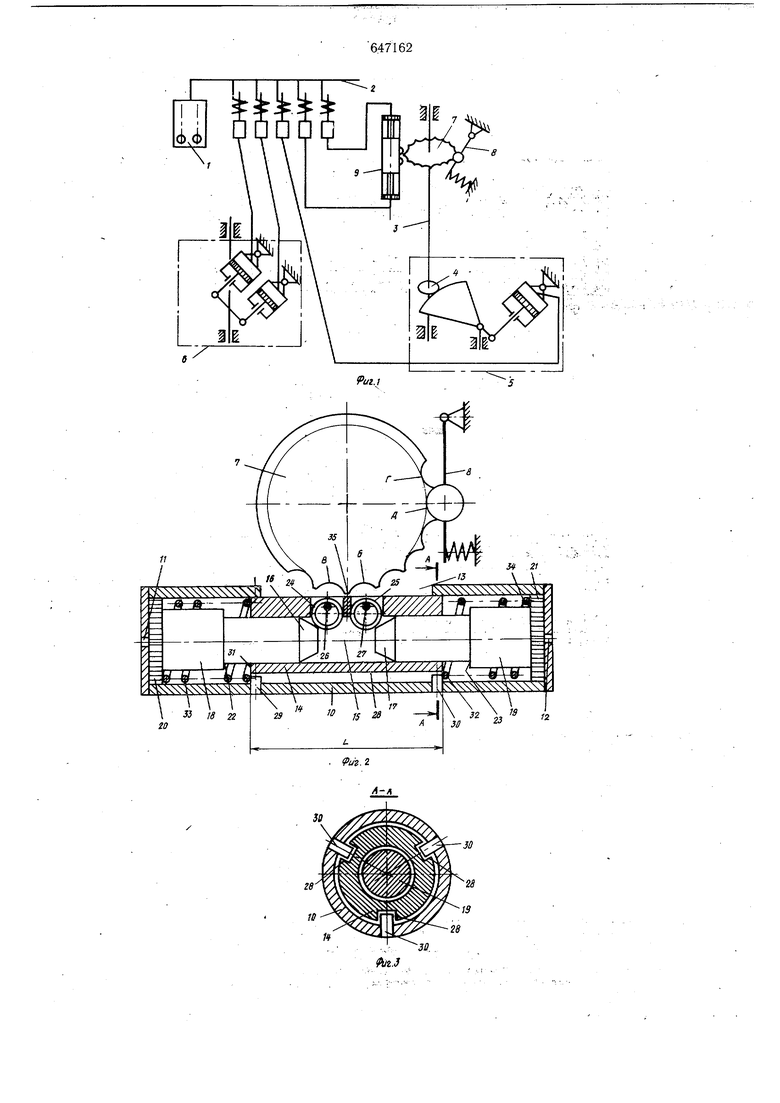
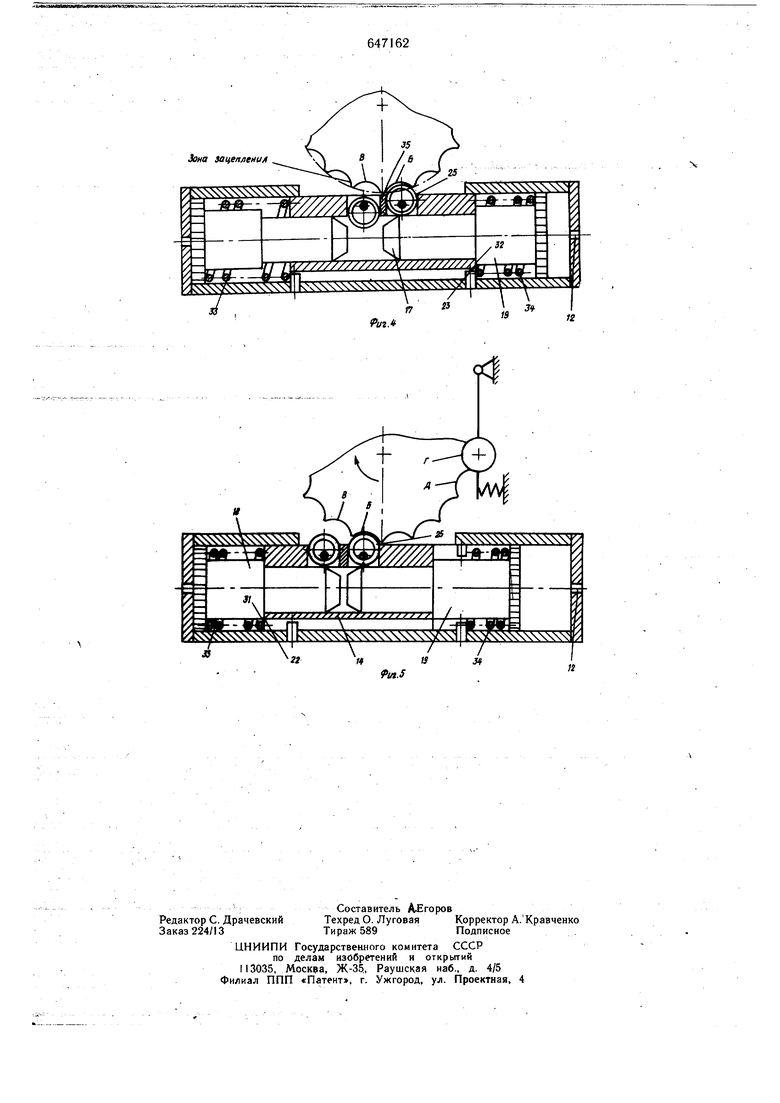
На фиг. 1 изображена кинематическая схема предлагаемого устройства; на фиг. 2- узел привода в исходном нерабочем положении; на фиг. 3 - разрез А-А пневмоцилиндра, показанного на фиг. 2; на фиг. 4 - узел привода в промежуточном положении одного из штоков пневматического цилиндра, на фиг. 5 - то же, в конечном положении штока пневматического цилиндра.
Устройство содержит переносной пульт 1 управления, электрически соединенный с цепями 2 управления. На поворотном валу 3 закреплена зубчатая щестерня 4, являющаяся частью узла 5 быстрого сброса позиций контроллера.. . V В схему включен узел управления поворотом реверсивного вала 6. На .валу 3 жестко закреплен также храповик 7, фиксируемый подпружиненным рычагом 8. В непосредственной близости с храповиком расположен пневмоцилиндр 9 набора и сброса позиций коНтроллера. Корпус 10 содержит отверстия II и 12 для подачисжатого воздуха и окно 13 для взаимодействия- с храповиком 7. Внутри ци линдра установлена обойма 14, снабженная аксиальным отверстием 15, куда входят своими рабочими поверхностями 16 и 17 два штока 18 и 19 с уплотнителями 20 и 21 и торцовыми, поверхностями 22 и 23. В боковых окнах обоймы 14 размещены свободные кольца 24 и 25, удерживаемые от выпаданИЯштифтами 26 и 27. На поверхности обоймы размещены продольные пазы 28, в которые входят выступы 29 и 30 корпуса 10 пневмоцилиндра. Расстояние между выступами 29 и 30 (по наружным поверхностям выступов) равно расстоянию между торцовыми поверхностями 31 и 32 обоймы. Между обоймой и штоками 18 и 19 размеш.ены пружины 33 и 34. Храповик снабжен зубьями 35 и впадинами Б , В, Г и Д, взаимодействующими с пневмоцилиндром 9. Работает устройство следующим образом. При тгодаче команды с пульта управления 1 сжатый воздух поступает (в зависимости от поданной команды) в одно из отверстий 11 или 12. Рассмотрим случай, когда подана команда с пульта управления на подачу сжатого воздуха в отверстие 12. Bi«ta3ibi.aioiifflTOK 19 при ЭТОМ пврвмещается влево, сжимая пружину 34. Рабочая поверхность 17 выталкивает кольцо 25 из бокового окна и вводит его в зону зацепления с зубьями 35 храповика 7. При дальнейшем перемещении штбка 19 он упрется своей торцовой поверхностью 23 в торцовую поверхность 32 обоймы 14. Кольцо 25 при этом упирается в зуб и поворачивает храповик 7 из положения, показанного на фиг. 2 и 4, в положение, показанное на фиг. 5, т. е. храповик повернется по часовой стрелке на одну позицию, и это положение зафиксируется роликом фиксатора, впадина Г переместится на место впадины Д. Далее обойма 14 упрется своей торцовой поверхностью 31 в торцовую., поверхность 22 штока 18 и система остановится. При стравливании сжатого воздуха через отверстие 12 пружина 34 перемещает шток 19 вправо, выводя при этомрабочую поверхность 17 из-под кольца 25, ко.торое, утопая в боковом окне обоймы 14, вь1ходИт из зоны зацепления зубьев 35. Пружина 33 перемещает обойму 14 в исходное положение. Как видно из вышеописанного, помещение в корпус пневмоцилиндра обоймы, охватывающей своим аксиальным отверстием обращенные друг к другу взаимодействующие с толкателем концы штоков, подпружиненных относительно нее и упоров корпуса пневмоцилиндра, охваченных продольными пазами упомянутой обоймы, позволяет производить управление валом контроллера и обеспечивать фиксацию его положений с помощью одного храпового колеса. Это сопоставление явно указывает на уменьшение веса, габаритов, а также повышение надежности за счет уменьщения количества узлов, упрощения кинематической схемы пневмоцилиндра в целом, т. е. на достижение целей данного предложения. Формула изобретения Устройство для дистанционного управления локомотивом, содержащее соединенные с переносным пультом пневмопривод поворота вала реверсора, пневмопривод поворота вала контроллера мащиниста, взаимодействующий посредством толкателей с установленным на валу контроллера храповиком, и механизм быстрого сброса позиций контроллера, отличающееся тем, что, с целью повышения его надежности и упрощения конструкции, пневмопривод поворота вала контроллера выполнен в виде двухпоршневого цилиндра, щтоки порщней которого обращены навстречу друг другу, при этом в корпусе цилиндра закреплены упоры и подвижная относительно них обойма, охватывающая концы штоков поршней и выполненная с продольным пазом и боковыми отверстиями для прохода толкателей. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 370096, кл. В 6-1 С 17/12, 1973. 2. Авторское свидетельство СССР № 313722, кл. В 61 С 17/12, 1970.
го
. Й/г. 2
S .
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯлокомотивом | 1973 |
|
SU370096A1 |
| Привод главного вала контроллера машиниста | 1983 |
|
SU1093586A1 |
| Устройство для дистанционного управления локомотивом | 1980 |
|
SU895773A1 |
| Устройство для дистанционного управления локомотивом | 1980 |
|
SU895774A1 |
| Пневмогидравлический дозатор | 1978 |
|
SU764932A1 |
| Патрон для обработки наружных и внутренних цилиндрических поверхностей, смещенных относительно оси детали | 1979 |
|
SU872048A1 |
| Устройство для изготовления щеток | 1986 |
|
SU1442180A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| Устройство для дистанционного управления транспортным средством | 1976 |
|
SU686093A1 |
| Автомат для сборки пластинчатых магнитопроводов электрических машин | 1981 |
|
SU991553A1 |
28
Зона зачел/ienu
X
й/г.«
