Изобретение относится к антенной технике, а именно к приводам антенных систем, и предназначено для использования его в средствах локации, в судовых навигационных радиолокационных станциях (СН РЛС). Изобретение должно соответствовать требованиям Российского морского регистра судоходства в части требований к навигационной аппаратуре в соответствии с Правилами по оборудованию морских судов. Изобретение относится к устройству и способу для управления бесколлекторным, бессенсорным синхронным двигателем, являющимся приводом антенной системы судовой навигационной РЛС, а более конкретно - к устройству и способу для управления двигателем, в котором наружный ротор содержит постоянные магниты, а три фазы обмоток статора выполнены в виде чередующихся радиальных полюсов. Прямой привод вращения волноводно-щелевой антенны на базе бесколлекторного, бессенсорного синхронного двигателя расположен на крышке корпуса антенного поста и содержит наружный ротор с постоянными магнитами, соединенный через фланцевое соединение с волноводно-щелевой антенной, и статор, жестко закрепленный на крышке антенного поста. Также настоящее изобретение относится к устройству и способу для управления двигателем, являющимся приводом антенной системы судовой навигационной радиолокационной станции, в котором его конфигурация упрощена и, таким образом, снижена стоимость изготовления привода.
Обычный бесколлекторный сенсорный синхронный двигатель сконструирован так, что для коммутации фазных обмоток статора используются датчики углового положения ротора (как правило, датчики Холла). Для шестишаговой стодвадцатиградусной коммутации фаз статора достаточно шести импульсов положения ротора на оборот при одной паре полюсов на роторе (для чего достаточно трех датчиков Холла). Кроме того, для выдачи сигналов углового положения ротора и связанной с ним антенны во внешние системы необходим второй датчик, выдающий 360 и более меток за один оборот ротора, что значительно удорожает систему.
Кроме того, снижается надежность такой системы за счет большего количества проводов, соединений и датчиков.
Наиболее близким аналогом является привод вращения приемопередающей антенны, содержащий двигатель, вал, редуктор, датчики углового положения антенны (см. RU 2255395 C2, 27.06.2005). Недостатками известного привода являются:
- наличие больших ускорений при пуске вращения антенны;
- повышенная шумность привода из-за редукторной передачи, высокая трудоемкость ее изготовления;
- необходимость использования датчиков углового положения антенны, высокая трудоемкость их изготовления;
- необходимость проведения технического обслуживания редуктора привода;
- неудовлетворительные массогабаритные характеристики.
Чтобы уйти от указанных выше недостатков, разработан привод антенной системы, выполненный на бесколлекторном, бессенсорном трехфазном синхронном двигателе постоянного тока.
Заявленное изобретение решает задачу обеспечения непрерывного вращения с заданной постоянной скоростью (как правило, 20 об/мин) привода антенной системы радиолокационной станции. Время непрерывной работы при этом составляет 1000 часов. Данное время непрерывной работы привода заставляет использовать комплектующие, ресурс работы которых был бы на порядок выше. То есть использование механически контактирующих изделий (силовых редукторов, щеточных механизмов) нецелесообразно.
Антенное устройство должно надежно функционировать при скоростях ветра, возможных при эксплуатации судна, на котором оно установлено. Эксплуатационно-технические характеристики антенного поста (АП) не должны ухудшаться при бортовой и килевой качке судна до ±10°.
Техническим результатом является упрощение конфигурации привода, создание надежного и дешевого устройства и способа для управления двигателем, обеспечение плавного разгона вращения антенны при подаче команды на исполнительную схему привода и плавная остановка антенны при выключении привода.
Для этого привод вращения волноводно-щелевой антенны содержит двигатель, передающий вращение на антенну, датчик угла и блок управления двигателем, причем двигатель выполнен в виде моментного двигателя, который является бесколлекторным, бессенсорным трехфазным синхронным двигателем постоянного тока, в котором вращающийся наружный корпус ротора жестко закреплен с фланцевым соединением для установки на нем антенной системы с вращающимся переходом и ротор с постоянными магнитами жестко соединен с вращающимся наружным корпусом с возможностью совместного вращения вокруг статора на верхнем подшипнике. Также ротор жестко соединен с цилиндрической втулкой, проходящей через внутреннюю полость статора, для соединения с внутренней вращающейся частью подшипника. Статор с невращающейся частью подшипника жестко закреплен на верхней части крышки антенного поста. Датчик угла выполнен в виде анализатора сигналов, снимаемых с обмоток статора и расположенного в блоке управления двигателем. Блок управления двигателем выполнен на микропроцессоре с аналого-цифровым преобразователем и с возможностью из сигналов, снимаемых с обмоток статора, вырабатывать:
- сигналы коммутации фаз обмоток статора для создания вращающегося с постоянной скоростью магнитного поля плавного пуска привода для оптимизации создания крутящего момента;
- метки углового положения антенны для выдачи во внешние системы.
Статор выполнен полым для пропуска через него волноводов и/или кабельных соединений.
Двигатель может быть выполнен как односекционным, так и многосекционным.
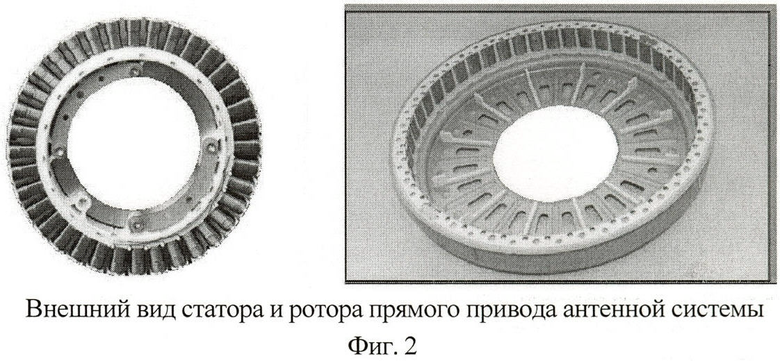
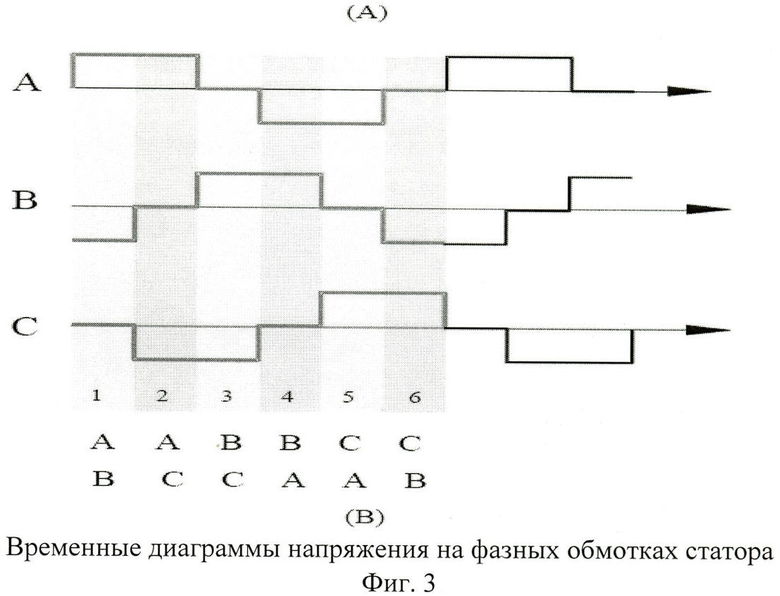
Схема односекционного привода (без модуля управления) показана на Фиг.1, а внешний вид ротора и статора привода - на Фиг.2. На Фиг.3 показаны временные диаграммы напряжений на обмотках статора.
На Фиг.1 показаны:
1. Наружный ротор с постоянными магнитами 2.
2. Постоянные магниты на роторе.
3. Трехфазный статор на основании с чередующимися полюсами.
4. Цилиндрическая втулка, закрепленная на внутренней вращающейся части подшипника 6.
5. Корпус ротора.
6. Шарикоподшипник двухрядный.
7. Крышка антенного поста.
8. Фланцевое соединение с антенной, жестко связанное с наружным ротором 1, корпусом ротора 5 и цилиндрической втулкой 4.
9. Болт с шайбой 10, прикрепляющий статор с основанием 3 и шарикоподшипник двухрядный 6 к крышке антенного поста.
10. Шайба.
Для решения проблем, существующих в предшествующем уровне техники, было создано изобретение, являющееся приводом антенной системы судовой навигационной радиолокационной станции. В нем в роторе вместо датчиков углового положения используется противо-ЭДС, снимаемая со статора, три фазы обмоток которого выполнены в виде чередующихся радиальных полюсов. При вращении ротора с постоянными магнитами в обмотках статора наводится противо-ЭДС.
Устройство для управления приводом антенной системы предусматривает модуль для управления работой двигателя. Этот модуль может осуществлять как управление тремя фазами статора двигателя, так и снятие с фаз статора противо-ЭДС. Противо-ЭДС после ее обработки модулем управления используется как для выработки сигналов коммутации фаз статора, так и для выработки меток углового положения ротора, жестко связанного с антенной системой, для их последующей выдачи во внешние системы приводом антенной системы судовой навигационной радиолокационной станции.
Используется устройство для управления двигателем, имеющим трехфазную обмотку статора, выполненную в виде чередующихся радиальных полюсов. В 120-градусном инверторе есть 60-градусный период за полуцикл, когда одна из трех фаз обесточена. Это стало возможно благодаря тому, что амплитуда противо-ЭДС в промежутках между импульсами широтно-импульсной модуляции не искажается напряжением питания привода.
Из Фиг.3 видно, что в каждый момент времени есть хотя бы одна фаза, напряжение питания на которой равно нулю и, следовательно, с нее можно снимать противо-ЭДС для последующей обработки и выработки сигналов коммутации фаз и сигналов углового положения ротора.
Таким образом, поочередно каждая из фаз в свой 60-градусный период является датчиком сенсорного сигнала.
Поскольку описываемый привод содержит внешний ротор, а момент привода пропорционален квадрату радиуса ротора, то размеры привода антенной системы могут быть существенно уменьшены по сравнению с приводом обычного двигателя переменного или постоянного тока.
Кроме того, с помощью настоящего изобретения легко осуществляется линейное управление и контроль постоянства скорости двигателя за счет синхронизации сенсорного сигнала полюса и сигнала задания скорости широтно-импульсной модуляции и контроль над положением двигателя, так как отсутствует изменение частоты вращения.
Поддержание постоянной скорости вращения антенны осуществляется с использованием метода регулирования напряжения при низкой частоте. Таким образом, можно снизить шум при переключении.
Число полюсов статора и число полюсов ротора может быть уменьшено или увеличено по необходимости, а форма статора и ротора конструируется свободно. Возможны плоские формы ротора и статора двигателя.
Соответственно возможно конструирование и изготовление различных двигателей для приводов различных антенных систем.
Вращающийся переход закреплен внутри корпуса антенного поста. Модуль управления двигателем включает контроллер управления на основе цифрового сигнального процессора и программируемого контроллера.
В качестве датчика положения антенны используется сам ротор, сигналы положения снимаются с обмоток статора. При вращении ротора в обмотках статора наводится противо-ЭДС, которая модулем управления приводом преобразуется в азимутальные метки и сигналы коммутации фаз статора. Отсутствие механических контактов существенно увеличивает срок службы привода. Большой внутренний диаметр ротора моментного двигателя встраиваемой конструкции позволяет разместить по его оси СВЧ волновод.
Ротор с закрепленными на нем постоянными магнитами расположен снаружи статора и вращается вокруг статора вместе с закрепленной на нем антенной системой. Такое расположение ротора увеличивает в 9 раз вращающий момент при неизменных массогабаритных характеристиках, что делает привод антенной системы компактным и технологичным.
Решающее значение для достижения требуемых метрологических характеристик привода на бесколлекторном, бессенсорном двигателе принадлежит используемому в его составе модулю управления приводом. В обмотках статора при вращении ротора с постоянными магнитами осуществляется генерация сигналов углового вращения антенны с последующим преобразованием в модуле управления выходных напряжений с обмоток статора в импульсную последовательность, которая соответствует азимутальным меткам угла поворота антенной системы.
Модуль управления двигателем в описываемом варианте привода также предназначен для формирования фазных токов возбуждения моментного двигателя. С этой целью в состав модуля входит преобразователь координат, осуществляющий разложение напряжения управления на три составляющие, соответствующие трехфазной системе обмоток статора. Каждая из составляющих напряжения управления поступает на фазный регулятор тока, который с помощью обратной связи по току осуществляет широтно-импульсную модуляцию выходного напряжения силового инвертора и тем самым производит регулирование фазного тока двигателя. Силовой инвертор представляет собой трехфазный модуль, содержащий силовой трехфазный выпрямитель, трехфазный инвертор на транзисторах и трехфазный драйвер управления транзисторами.
В состав модуля управления двигателем входят также пускорегулирующая аппаратура, аппаратура контроля нормального функционирования силового инвертора, температуры перегрева силовых транзисторов и температуры перегрева двигателя.
Кроме того, на модуль управления поступают сигналы углового положения ротора, наводимые в статоре. Они используются модулем управления для коммутации фаз статора с целью обеспечения плавного хода и эффективного крутящего момента.
Структура безредукторного бессенсорного привода с моментным двигателем и возможность прямого управления угловым положением щелевой антенны без использования механического редуктора позволяет обеспечить длительную и надежную работу привода в современных системах морского и берегового базирования.
Преимущества привода антенной системы:
1. Прямой привод антенной системы с постоянными магнитами на наружном роторе обеспечивает более высокий крутящий момент за счет более совершенной конструкции, уменьшения массогабаритных характеристик. Прямой привод антенной системы характеризуется высоким отношением диаметра к длине и большим числом магнитных полюсов, что оптимизирует создание крутящего момента.
2. Привод способен выдерживать (компенсировать) внезапно возникающие перегрузки по моменту (резкий порыв ветра) без механических повреждений (пятикратный запас по моменту).
3. Прямой (безредукторный) привод означает отсутствие элементов передачи мощности между двигателем и приводимой во вращение нагрузкой, что, в свою очередь, дает преимущества перемещения с высокой динамикой практически без люфта, превосходную жесткость при статических и динамических нагрузках и устойчивость всех основных электромагнитных и механических характеристик во время работы.
4. Компактность, легкость и надежность конструкции (в прямом приводе отсутствует трансмиссия и другие традиционные элементы: редукторы, механизмы передачи, муфты, подшипники, сальники, опорная рама, датчик углового положения и т.д.), простота изготовления, уменьшение стоимости изготовления.
5. Преимущества прямого привода антенной системы включают также сокращенный объем технического обслуживания и меньшее количество запасных частей в силу малого количества деталей, использованных в конструкции этих двигателей, экономию энергии за счет более эффективной силовой передачи, а также экономию пространства за счет использования малогабаритных и компактных приводов антенных систем вместо приводов антенных систем, оснащенных комбинацией из мотора и редуктора.
6. Увеличивается помехозащищенность приемного тракта радиолокационной станции ввиду отсутствия коллектора, искрение которого создает помехи для приема.
7. Вследствие отсутствия трущихся частей компоненты двигателя прямого привода не подвержены износу, он практически не требует технического обслуживания на протяжении всего срока службы.
8. Для прямого привода характерны низкие уровни шума и вибрации.
9. Простота и удобство монтажа.
10. Высокий коэффициент полезного действия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| СИСТЕМА ЭЛЕКТРОННОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2018 |
|
RU2674993C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| СПОСОБ НАСТРОЙКИ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2556884C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| СХЕМА ОТСЛЕЖИВАНИЯ И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОРИЕНТАЦИИ РОТОРА ДВИГАТЕЛЯ ВО ВРЕМЯ ПОТЕРИ МОЩНОСТИ ИСТОЧНИКА К ПРИВОДУ ДВИГАТЕЛЯ | 2013 |
|
RU2639896C2 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ (ВАРИАНТЫ) | 2007 |
|
RU2340994C1 |
| МНОГОСЛОЙНЫЙ ТОРЦЕВОЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2251784C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
Изобретение относится к антенной технике, а именно к приводам антенных систем, и может быть использовано в средствах локации, в судовых навигационных радиолокационных станциях (СН РЛС). Техническим результатом является упрощение конфигурации привода, создание надежного и дешевого устройства и способа для управления двигателем, обеспечение плавного разгона вращения антенны при подаче команды на исполнительную схему привода и плавная остановка антенны при выключении привода. В приводе вращения волноводно-щелевой антенны осуществляют управление бесколлекторным, бессенсорным синхронным двигателем, при этом прямой привод вращения волноводно-щелевой антенны на базе бесколлекторного, бессенсорного синхронного двигателя расположен на крышке корпуса антенного поста и содержит наружный ротор с постоянными магнитами, соединенный через фланцевое соединение с волноводно-щелевой антенной, и статор, жестко закрепленный на крышке антенного поста. Три фазы обмоток статора синхронного двигателя выполнены в виде чередующихся радиальных полюсов. Конфигурация прямого привода упрощена, и, таким образом, снижена стоимость изготовления привода. 2 з.п. ф-лы, 3 ил.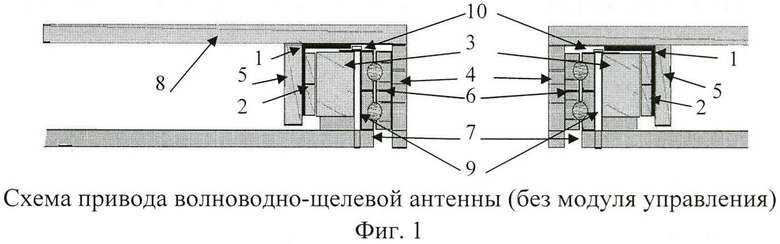
1. Привод вращения волноводно-щелевой антенны, содержащий двигатель, передающий вращение на антенну, датчик угла и блок управления двигателем, отличающийся тем, что двигатель выполнен в виде моментного двигателя, который является бесколлекторным, бессенсорным трехфазным синхронным двигателем постоянного тока, в котором вращающийся наружный корпус ротора жестко закреплен с фланцевым соединением для установки на нем антенной системы с вращающимся переходом, ротор с постоянными магнитами жестко соединен с вращающимся наружным корпусом с возможностью совместного вращения вокруг статора на верхнем подшипнике; также ротор жестко соединен с цилиндрической втулкой, проходящей через внутреннюю полость статора для соединения с нижним подшипником, расположенным на опоре, жестко соединенной с внутренней частью крышки антенного поста, статор закреплен на опоре верхнего подшипника, которая жестко соединена с внешней частью крышки; датчик угла выполнен в виде анализатора сигналов, снимаемых с обмоток статора и являющихся сигналами меток углового положения антенны, блок управления двигателем выполнен на микропроцессоре с аналого-цифровым преобразователем и с возможностью синхронно с анализируемыми сигналами с обмоток статоров вырабатывать сигналы коммутации фаз обмоток статоров для создания вращающегося с постоянной скоростью магнитного поля, плавного пуска привода для оптимизации создания крутящего момента и выработки инкрементных импульсов углового перемещения ротора для выдачи результатов во внешние системы.
2. Привод по п.1, отличающийся тем, что статор выполнен полым для пропуска через него волноводов и/или кабельных соединений.
3. Привод по п.1, отличающийся тем, что двигатель выполнен в виде многосекционного моментного двигателя.
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ ПРИЕМОПЕРЕДАЮЩЕЙ АНТЕННЫ | 2003 |
|
RU2255395C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ ПО АЗИМУТУ И УГЛУ МЕСТА | 1990 |
|
RU2020666C1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| US 20100972 А1, 22.04.2010 | |||
| FR 2911011 A1, 04.07.2008 | |||
| US 7492322 В2, 17.02.2009 | |||
| Устройство для переключения гирлянд | 1982 |
|
SU1134839A1 |

