ответственно вход и выход формироватёля фазных опорных сигналов ротора.
4. Устройство по П.1, о т л ичающееся тем, что формирователь гармонических сигналов содержит последовательно соединенные блок преобразования координат,блок памяти, снабженный входом синхронизации, и блок нормирования сигналов выхода) которого образуют фазные выходы формирователя гармонических сигналов, {1ри этом вход синхронизации, блока памяти и фазные входы
блока преобразования: координат образуют соответственно вход синхронизации и фазные входы формирователя гармонических сигналов.
5. Устройство по п.1, о т л ичающееся тем, что блок син-, хронизации содержит последовательно соединенные элемент выдержки времени и схему совпадений,выход которой образует выход синхронизации блока синхронизации, при этом входы и выходы элву|ента выдержки времени образуют соответственно фазные входы и
выходы блока синхронизации.
,.,...


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU1083319A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU991570A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |

1. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГАРМОНИЧЕСКИХ СИГНАЛОВ ЧАСТО ТЫ ВРАЩЕНИЯ ВАЛА АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНШ РОТОРОМ, содержащее датчики фазных токов статора и датчики, фазных параметров ротора,свяsaHHbte с фазными входами формирователя гармонических сигналов, фазные выходы которого образуют фазные выходы устройства для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором, от л и ч а ютщ е ее я тем, что, с целью повышения точности определения гармони.ческих сигналов частоты вращения вала асинхронного дв.игателя с фазным роторсм, в него введены формирователь фазных опорных сигналов статора в виде производных фазных токов , формирователь фазных опорных сигналов ротора, блок синхронизации с фазными входами и выходс1ми и выходом синхронизации и формирователи приращений опорных сигналов статора и ротора с фазкъали входами и выходами и фазными входами синхронизации, при зтом формирователь гармонических сигналов снабжен входом синхронизации, фазные входы формирователя приреицений опорных сигналов статора через формирователь фазных опорных сигналов статора в виде произ-. j; водных фазных токов подключены к датчикам фазных токов статора,фазные входы формирователя приращений опорных сигналов ротора через формирователь фазных опорных сигналов ротора подключены к датчикам фазных параметров ротора, фазнйе вы-ходы формирователей приращений опорных сигналов статора и ротора подключены к соответствующим фазным входам формирователя гармонических .сигналов, фазные входы синхронизации формирователей приращений опорных сигналов статора и ротора объединены пофазно между собой и.подключены к фазным выходам блока синхронизации, выход синхронизации которого соединен с входом синхронизсщии формирователя ел га юнических сигналов, а формнро-ватель фазных опорных сигналов статора в виде производных фазных токов содержит в кгикдой фазной цепи элемент дифференцирования, и выход которого образуют соответственно вход и выход формирователя опорных сигналов статора. 2.Устройство по п.1,во т-л иоь ч а ю щ е ее я тем, что датчики фазных параметров ротора выполнены : в виде датчиков фазных TOKOS роСЛ тора, при этом форкпрователь фазных опорных сйгнсшов ротора содержит.в 00 00 каждой фазной цепи элемент дифференцирования, вход и выход которого образуют соответственно вход и выход формироватедя фазных опорных сигналов ротора. 3.Устройство по П.1, о т л ич а ю щ е -е с я тем, что датчики фазных парсц ефров выполнены в виде датчиков фазных напряжений .ротора, при этом формирователь фаз ных опорИых сигналов ротора содер: жит в каждой фазной цепи элемент пропорционального преобразования, вход и выход которого образуют со
Изобретение относится к электротехнике, в частности к устройствам для управления электроприводами переменного тока, и может быть использовано в электроприводе,построение на базе асинхронного двигтеля с фазным ротором, для опрделения гармонических , сигналов, изменяющихся, с частотой вращения, без установки на валу датчика углового положения.
Известно устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с Фазным ротором, выполненное в виде электромеханического датчи1 а углового положения, устаноленного на валу двигателя СП.
Недостаткрм данного устройства является конструктивная сложность из-за необходимости размещения на Bcuiy двигателя электромеханическог датчика.
Наиболее близким к изобретению по .технической сущности является устройство для определения гармони ческих сигналов частоты вращения вала асинхронного двигателя с фарным ротором, содержащее датчики фазных токов статора и ротора,связанные с входами формирователя гармонических функций С 21.
Недостатком известного устройства является низкая точность определения гармонических сигналов частоты вращения из-за сшибок, вносимых датчиками токов статора и ротора при координатных.преобразователях их выходных сигналов, принятых за опорные сигналы, особенно при малых величинах этих токов.
Цель изобретения- повьвиение точности определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором за счет использования в координатных преобразованиях сигналов, соответствующих прираще5 ниям фазных опорных параметров статора и ротора.
Указанная цель достигается тем, что в устройство для определения, гармонических сигналов частоты
Q вращения вала асинхронного двигателя с фазным ротором, содержащее датчики фазных токов статора и датчики фазных параметров ротора, связанные с фазными входами форми рователя гармонических функций, фазные выводы которого образуют . фазные выходы устройства, введены формирователь фаз1щх опорных сигналов статора в виде производных фазных токов статора, формирователь фазных опорных сигналов ротора, блок синхронизации с фазными входами и выходами и выходом синхронизации и формирователи приращений опорных сигналов статора и ротора с фазными входами и выходами и фазными входами синхронизации, при этом формирователь гармонических сигналов снабжен входом синхронизации, фазные входы формиро0 вателя приращений опорных сигналов статора через формирователь фазных опорных сигналов статора в виде производных фазных токов подключены к датчикам фазных токов статора,
5 фазные вхоща формирователя приращений опорных сигналов ротора через формирователь фазных опорных сигналрв ротора подключены к датчикам фазных параметров ротора, фазные
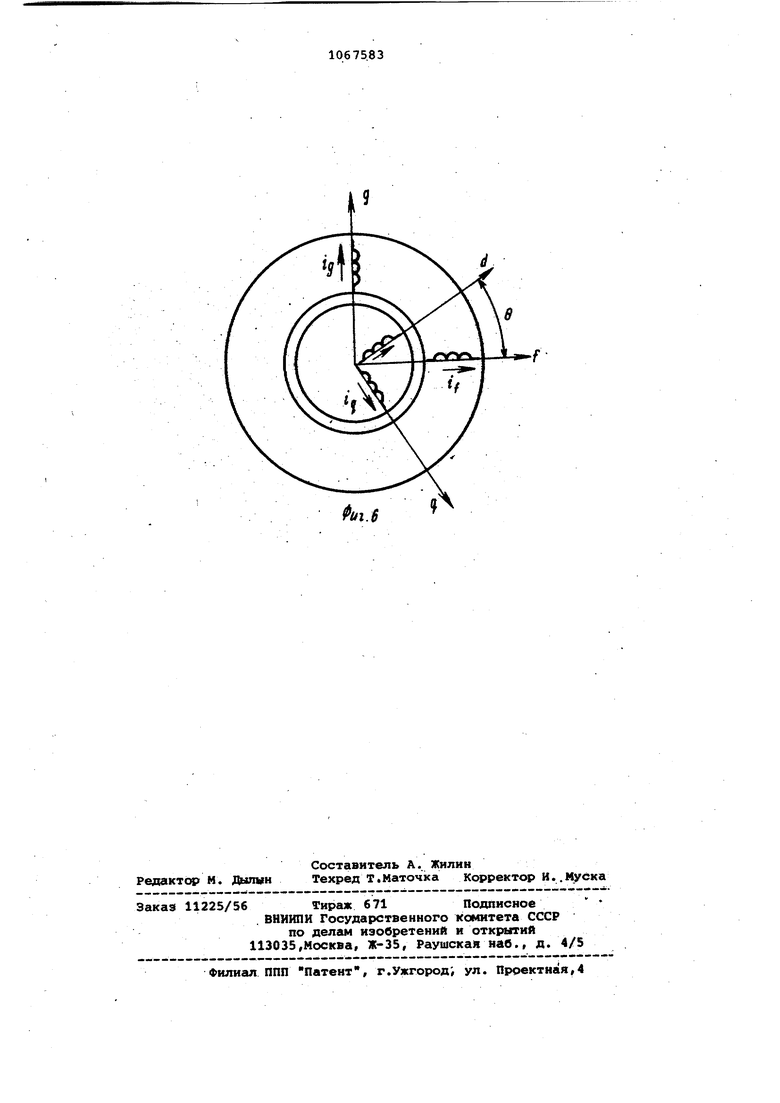
0 выходы фоцширователей приращений опорных сигналов статора и ротора подключены к соответствующим фазным входам формирователя гармонических сигналов,-фазные входысинхронизации формирователей приращений опор1 ных сигналов статора и ротора объе, динены пофазно между собой и подклю . чены к фазным выходам блока синхронизации, выход синхронизации которого соединен с входом синхро. низации формирователя гармонических сигналов, а формирователь фазных опорных сигналов статора в виде производных фазных токов содержит в каждой фазной цепи элемент дифферен цирования, вход и выход которого образуют соответственно вход и выход формирователя опорных сигналов статора. Датчики фазных параметров ротора выполнены в виде датчиков фазных токов ротора, при этом формирователь фазных .опорных сигналов ротора содержит в каждой фазной цепи элемент дифференцирования, вход и выход которого образуют соответственно вход и выход формирователя фазны опорных сигналов ротора. Датчики фазных параметров ротора выполнены в виде датчиков фаэных напряжений ротора, при этом формирователь фазных опорных сигналов ротора содержит в каждой фазной цепи элемент пропорционального преобразования, вход и выход которого образуют соответственно вход и выход формирователя фазных опорных сигналов ротора. Формирователь гармонических сигналов содержит последовательно сое; диненные блок преобразования коорди нат, блок памяти, снабженный входом синхронизации, и блок нормирования сигналов, выходы которого образуют фазные выходы формирователя гармонических сигналов, при этом вход синхронизации блока памяти и фазные входы блока преобразования координа образуют соответственно вход синхро низации и фазные входы формировател iгармонических сигналов. ; Блок синхронизации содержит последовательно соединенные элемент вы держки времени и схему совпадений, выход которой образует выход синхро низации блока синхронизации,при этом входы и выходы элемента выдерж ки времени образуют соответственно фазные входы и выходы блока синхро.низации.. На фиг.1 представлена структурна схема устройства для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором, включенного в состав управляемого электропривода; йа фиг.2 - электрическая схема фазы формирователя приращений опорный сигналов.; на фиг.З - временная диаг рамма его работы; на фиг.4 - электрическая схема фазы блока памяти/ на фиг.З - временная диаграмма его работы} на фиг.6 - схема размещения обмоток двухфазного асинхронного двигателя с фазным ротором. Устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором содержит датчики фазных токов статора 1 (фиг.1) и датчики фазных параметров ротора 2, связанные с входами формирователя гармонических сигналов 3, (| азные выходы которого образуют фазные выходы устройства. В устройство введены формирователь фазных опорных сигналов статора 4, формирователь фазных опорных сигналов ротора 5, блок синхронизации б с фазными входами и выходами и выходом синхронизации 7, формирователь приращений опорных сигналов статора 8 с фазными входами и выходами и фазными входами син-. хронизации 9, формирователь приращений опорных сигналов ротора 10 с фазными входами и выходами и фазными входами синхронизации 11. Формирователь гармонических сигналов 3 .снабжен входом синхронизации 12. Фазные входы формирователя приращений опорных сигналов статора 8 через формирователь фазных опорных сигналов статора 4 подключены к датчикам фазных токов статора 1.Фазные входы формирователя приращений опорных сигналов ротора 10 через формирователь фазных опорных сигналов ротора 5 подключены к датчикам фазных параметров ротора 2. Фазные выхода формирователей приращений опорных сигналов статора и ротора 8 и 10 подключены к соответствующим фазным входам формирователя гармонических сигналов 3.. Фазные входы синхронизации 9 и 11 формирователей приращений опорных сигналов статора и ротора 8 и 10 объединены пофазно между собой и подключены к фазным вЁ1хода1ъ блока синхронизации 6, выход синхронизации 7 которого соединен с входом синхронизации 12 формирователя гармонических сигналрв 3. Формирователь фазных опорных сигналов статора 4, в качестве которых использованы производные фазных токов статора, содержит в каждой фазной цепи.элемент дифференцирования ; вход и выход которого образуют соответственно вход и выход формирователя опорных сигналов статора 4. . При выполнении датчиков фазных параметров ротора 2 в виде датчиков фазных токов ротора 13 формирователь фазных опорных сигналов ротора 5 содержит в каждой фазной цепи элемент дифференцирования 14,
вход-и выход которого образуют соответственно вход и выход формирователя фазных опорных сигналов ротора 5.
При выполнении датчиков фазных параметров ротора 2 в виде датчиков фазных напряжений ротора 15 формирователь фазных опорных сигналов ротора 5 содержит в каждой фазной цепи эл-емент пропорционального преобразования 16, вход и выход которого образуют соответственно вход и-выход формирователя фазных опорных сигналов ротора 5.
Формирователь гармонических сигналов 3 содержит последовательно соединенные блок-- преобразования координат 17, блок памяти 18, снабженный ВХОДОМ синхронизации, и бло нормирования сигналов 19, выходы 20 которого образуют фазные выходы формирователя гармонических сигналов . Вход синхронизации блока памяти 18 образует вход синхронизации 12 формирователя гармонических сигналов 3, Фазные входы блока преобразования координат 17 образуют фазные входы формирователя гармонических сигналов 3.
Блок синхронизации 6 содержит последовательно соединенные элемен выдержки времени 21 и схему совпадений 22, которой образует выход синхронизации 7 блока синхронизации 6. Входы и выходы элемента выдержки времени 21 образуют соответственно фазные входы и выходы блока синхронизации б.
В составе электроприводадатчики фазных токов статора 1 фазных токов и напряжений ротора 13 и 15 включены соответственно в цепи ста ра и ротора асинхронного двигателя с фазным ротором 23. Фазные цепи ротора асинхронного двигателя 23 подключены к выходам и шyльcнoгo преобразователя тока 24, содержащего.силовую часть 25 и схему управления силовыми элементами 26, выходы которой обра.зуют фазные входы блока синхронизации 6.
; Входы схемы управления силовыми элементами 26 через схему управления электроприводом 27 подключены к выходам 20 формирователя гармонических СИГНсШОВ 3 .
Формирователи приращений опорных сигналов статора и ротора 8 и 10 содержат в кгикдой фазе операционный усилитель 28 (фиг.2), в цепь обратной связи которого включен ре.зистор 29. К инвертирующему входу операционного усилителя 28 подключена цепь из последовательно соединенных конденсатора 30 и резистора 31. Между общей точкой конденсатора 30 и резистора 31
и неинвертирующим входом операционного усилителя 28 включен управляемый ключ 32, входуправления которого является фазным входом синхронизации формирователей приращений опорных сигналов 8 и 10.
Блок памяти 18 содержит в каждой фазе операционный усилитель 33 (фиг. 4), в цепь обргСтной связи которого включен конденсатор 34 и цепь из последовательно соединенных управляемого ключа 35 и резистора 36. К входу операционного усилителя 33 подключен резистор 37.
Устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором работает следующим образом.
Для двухфазного асинхронного двигателя с размещением обмоток статор и ротора (фиг.6} исходные уравнения для фазных напряжений (двухфазный двигатель выбран для упрощения записей) следующие:
U Cj4 |t;af.(-W-U)
(Ц-Ч.
Д -ч
Ucf --Crf-U . CU-c)4 Ч Си,-Ц
Ч
at(), (1)
где g, f, 1 d - оси фазных обмоток статора и ротс а,и - фазное напряжение R - активное фазное сопротивление обмотки/
L - фазная индуктивность обмоток и взаимоиндуктйвность обмоток статора rt ротора.
Примем условие, при котором активные сопротивления обмоток равны между собой. Примем также, что фазные индуктиьности обмоток равны между собой, т.е. .
Rf .R(, Ro,
со Lp Lej. « Lj - Ц, LO
Взаимоиндуктивности обмоток статора и ротора записываются
Urf-Lrff-Ucoe-e-,
. , Lqrf ,-sm-S, , « где LjTi - максимальная взаимоиндуктивность между обмотками - угол поворота ротора относительно статора. Учитывая (2) и (3) и произведя дифференцирование, уравнения (1) можно преобразовать к следующему виду: Uf«, -U(,s« -ldSb« + IQOOT ), at Ug-R«l 34o 4U.( ), lU - L - U(. cose| (у,б||), U -U(-co8& .. Сущность работы устройства заклю чается в том чтобы использовать д получения требуемых гармонических сигналов частоты вращения, т.е. sin и соз-вч лриращения фазных напряжений либо производных токов, которые имеются при управлении дви гателем с помощью импульсного преобразователя тока любого типа.Пуст роторные напряжения и н U( получают приращения aUet и A.UC - в резул тате переключения ключей силовой части 25. Рассмотрим систему уравнений (4) для двух моментов времен соответственно до момента переключения силовых ключей t| и после него tj. Считаем, что переключение происходит мгновенно. напряжения на обмотках ротора получают приращения bUcf и Alh от преобразователя тока. Напряжения на обмотках статора в режиме двойного питания определяются питаимцей сетью и поэтому не изменяются, т.е. 5l Uf2 , UQ, Ucjt, а в короткозамкнутом режиме равны нулю и также не изменяются, т.е. U, . .«Ufj О, ITa Uftj « 0.. Статорные и роторныетоки не изменяются,так как протекают в индуктивных цепях .ij-, v iq ioj . Угол -9 не изменяется из-за инерционности вала, т.е.Одгва, Скорость ггг не изменяется из-за инерционности вала,т.е. () Производные токов получают прираще ния, в результате которых и уравно вешены приращения роторных нгшряжений:VSr) 1 ), « (Хё) Запишем каждое из уравнений системы (4} для моментов t и t и вычтем одно из другого, при этом получаем: 0. LO Д U(cos& л.вШвл) с1ъ сгх ох I ,-. й.ч«,(с ««-л -со$в-л) j Ud-и-А -и(ЙЛ л) I uUc -U-u5 UC-cMft-u sb ij)j . в уравнения (9) и {10) входят искомые гармонические сигнгилы частоты вращения, т.е. sind-и cosSi и приращения фазных величин-напряжений и производных токов. Из (9) получаем выражения для sin &- и ао5-в- .. .1с, (M4Agf r Ь где Кл . Получив-из (9) выргикения для |if и л и подставляя их в (10), atat.. получаем , ,. uUj CLo--r-VATcrLo X . cfc ,u.a..iu.).,|c т.е. приращения производных фазных токой ротора пропорциональны приащениям фазных напряжений. Подставляя выражения (12) в (10), получимJ,-jfi .„а , AU. (Ь ЧLmгде Ко а - Ы- 1
В.устройстве для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором (фиг.1) реализуются зависимости (11) и (13).
Производные фазных токов статора
тгЦ т1 получают на выходах форми dt dii ,
рователя опорных сигналов статора 4 фазные цепи которого содержат элементы дифференцирования.
При реализации (11) датчики фазных параметров ротора 2 выполняются в виде датчиков фазных токов ротора 13. При этом на выходах фазных элементов дифференцирования получаю производные фазных токов ротора dia. diat dt dt
При реализации (13) датчики фазных параметров ротора 2 выполняются в виде датчиков фазных напряжений ротрра i5.При этом на выходах элементов пропорционального преобразования получают сигналы, соответствующие фазным напряжениям ly, ротрра.
В формирователях приращений опорных сигналов статора и ротора 8 и 10 формируются импульсы, величина которых равна величине приращений опорных сигналов, т.е. производных токов статора и производных токов ротора, либо напряжений ротора.
Управляемый ключ 32 (фиг.2) открыт при отрицательном напряжении Ua на его управляющем входе. На диаграмме (фиг.3) представлено формирование импульсов напряжения, величина которых равна величине приращений фазных напряжений Напряжение синхронизации Uc. формируется с псмлощыо блока-синхронизации 6. Импульсы и синхронизированы с моментами переключения силовых ключей, преобразователя тока 24. Постоянная времени выбирается Таким образом, чтобы она была много больше времени импульса tj,. Имтульсы напряжения с величиной равной приращению опорных сигналов с выходов формирователей приращений опорных сигналов статора и ротора 8 и 10 поступают на соответствующие входы блока преобразования координат 17, на выходы которого поступают импульсы напряжения, сЬответствующие ненормированным гармоническим сигналам sin-O- cos -& в соответствии с выражениями (11), (13). В промежутках времени между импульсами напряжения на выходах блока преобразования координат 17 равны нулю. Для запсялинания текущих значений sin-.д cos-в к выходу блока преобразования координат 17 подключен блок пгиляти 18Управляемый ключ 35 (фиг. 4) открыт при отрицательном значении напряжения Uy управления. Напряжение Uftii (фиг.5)представляет сособой последовательность импульсов, величина которых пропорциональна sin в-;, Напряжение и в первом приближении пропорционально Sin-6- Ошибка, обусловленная
дискретностью, .зависит от количества переключений силовых элементов преобразователя тока 24. С помощью блока нормирования
сигналов 19 осуществляется формирование гармонических сигналов i sin-&; совб- единичной амплитуды.
Синхронизация работыформирова- .
телей. приращений опорных сигналов статора и ротора 8 и 10 и блока памяти 18 с моментами переключений силовых элементов 25 преобразователя тока 24 осуществляется с помощью блока синхронизации б, входными сигналами для которого являются выходные сигналы схемы управления 26.. С помощью элементов выдержки времени 21 формируются импульсы заданной длительности, служащие в качестве синхронизирующих импульсов для формирователей 8 и 10 приращений, опорных сигналов статора и ротора (сигнал Uj
на ). Импульсы с выходов элементов выдержки времени 21 поступают на входы схемы совпадений 22, выходное напряжение которой является управляющим для блока памяти 18 (сигнал Uij на фиг.4). В моменты
переключения силовых элементов 25 преобразователя трка 24 в блоке памяти 18 происходит смена информации sin -9-,cos В. моменты отсутствия переключения силовых элементов 25
в схеме совпадения 22 фор|лируется сигнал на запоминание информации sin-&;,cQs с предыдущего переключения.
Особенностью устройства (фиг.1) является то, что для определения гармонических сигналов частоты вращения вала асинхроннрго двигателя ; с фазным роторе используются не сами опорные сигналы статора и ротора в виде йроизводных токов статора
и рртора, а их приращения, образуемые в моменты переключений силовых
элементов преобразователя тока. При
этом величины этих приращений являются соизмерик&зми с амплитудными значениями напряжения питания преобразователя тока, что обуславливает высокую помехоустойчивость устройства и точность работы, так как
уменьшается влияние собственных ошибок датчиков фазных токов статора и ротора.
Таким образом, введение в устройство для определения гармонических сигналов частоты вала асинхронного двигателя с фазным ротором формирователя фазных опорных сигналов статора и ротора, блока синхронизации и формирователей приращений опорных сигналов статора и ротора обеспечивает повышение точнорти работы в сравнении с известным решением.
n II П
и u
i
Stft
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3859578, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
