Изобретение относится к электротенике и может быть использовано при разработке электроприводов на базе синхронных двигателей.
Цель предложения - расширение диапазона регулирования частоты вращения и повышешае равномерности в об-; |ласти низких частот вращения.
На чертеже приведена блок-схема электропривода.
Электропривод содержит синхронный электродвигат(гль 1, силовые фазные обмотки 2 и 3 которого подключены к выходам усилителей 4 и 5 тока, сое- гавленных из силовых частей 6 и 7 л фазных датчиков 8 и 9- тока. Входы (Усилителей 4 и 5 тока подключены к выходам блока 10 прямого преобразования координат, вход задания кото- ого подключен к блоку 11 задания. Тервые входы фазных апериодических звеньев 12 и 13 подключены к выходам блока 14 вьщеления фазных ЭДС, к входам которого подключены фазные измерительные обмотки 15 и 16 синхронного электродвигателя 1. Электропривод снабжен источником 17 переменного напряжения с выходной обмоткой, фазными фазированными выпрями- телями 18 и 19, каждый из которых имеет сигнальный и опорный входы и выход. Электропривод снабжен также координатным преобразователем 20 с фазными входа1У1и и выходами, блоком 21 компенсации с фазными сигнальными и компенсирующими входами и выходами, блоком 22 нормирования с фазными входами и выходами. Блок 14 выделения фазных ЭДС снабжен компенсирующими фазными входами. Синхронный электродвигатель 1 снабжен дву- мя ортогональными обмотками 23 и 24 1определения углового положения рото- 1ра 25, повернутыми относительно фаз- |Ных обмоток 2 и 3 синхронного элект- |родвигателя 1 на угол 45 и состоящи ми из полуобмоток, расположенных ди- ;аметрально противоположно в статоре 26 синхронного электродвигателя 1. Средние точки ортогональных обмоток .23 и 24 подключены к сигнальным вхо;дам соответствующих фазных фазиро- |ванных выпрямителей 18 и 19, к опор- :ным входам которых подключены в ыход- ная обмотка источника 17 переменного ;напряжения, подключенная также к I крайним точкам ортогональных обмоток :23 и 24 определения углового положе
д 5
5
0
5
0
ния ротора 25. Выходы соответствующих фазных фазированных выпрямителей 18 и 19 подключены к фазным входам координатного преобразователя 20, фазные выходы которого подключены к соответствующим фазным сигнальным входам блока 21 компенсации, фазные выходы которого подключены к вторым входам фазных апериодических звеньев 12 и 13, выходы которых подключены к соответствующим фазным входам блока 22 нормирования, фазные выходы которого подключены к соответствующим входам опорных гармонических функций блока 10 прямого преобразования координат. Выходы фазных датчиков 8 и 9 тока подключены к соединенным вместе соответствующим фазным компенсирующим входам блока 14 выделения фазных ЭДС и блока 21 компенсации.
Электропривод работает следующим образом.
В электроприводе организовано частотно-токовое моментное управление синхронным электродвигателем. Управление моментом производится по сигналу задания UQ, формируемому в блоке 11 задания .
Сигнал U(3 в блоке 10 прямого пре-: образования координат перемножается на так называемые опорные гармонические функции cosp(x,,apry- ментом которых является угол положения вала синхронного двигателя. Выходные сигналы блока 10 прямого преобразования координат, сформированные в соответствии с выражениями
U, q -UQ; sinppi; U;g UQ.cospci , где p - число пар полюсов, синхронного электродвигателя: 1; oi - угол поворота его вала, поступают на входы усилителей 4 и 5 тока. Соответственно, выходные токи усилителей 4 и 5 тока, являющиеся фазными токами синхронного электродвигателя 1, пропорциональны сигналам и и.;. При этом момент двигателя пропорционален сигналу UQ.
Для формирования опорных гармонических функций в эле.ктроприводе используются сигналы UK, U(j ортогональных обмоток 23 и 24 определения углового положения ротора и сигналы фазных измерительных обмоток 15 и 16. Обмотки 23 и 24 представляют собой встроенный индуктивный датчик положения ротора 25 синхронного электродвигателя 1. Полуобмотки обмоток 23 и
24намотаны в отверстиях спинки якоря, по которой замыкается магнитный поток синхронного электродвигателя 1, Индуктивности этих полуобмоток зависят от степени намагниченности материала спинки якоря, расположенного вокруг отверстий, и которых эти полуобмотки намотаны. Степень намагниченности, в свою очередь, определя- ется положением вектора магнитного потока синхронного электродвигателя
1. Положение же вектора магнитного потока определяется положением индуктора, расположенного на роторе
25электродвигателя 1. Встроенный датчик положения, состоящий из обмоток 23 и 24, работает на переменном токе. Для этого на крайние точки обмоток подается переменное напряжение с выходной обмотки источника- 17 переменного напряжения. Информация об угловом положении ротора 25 содержится в огибающих переменных напряжений - У и Uu,,
снимаемых со средних точек обмоток 23 и 24. Вьщеление этих огибающих производится с помощью фазных фазиро- ванньгх выпрямителей 18 и 19. На сигнальные входы этих вьшрямителей подаются напряжения U|i средних точек обмоток 23 и 24, а на опорные входы- напряжение выходной обмотки источника 17 переменного напряжения. Выходные сигналы ифвх и U( 81J фазных фазированных выпрямителей . 1 а и 1У поступают на координатный преобразователь 20, в котором по известным правилам осуществляется приведение этих сигналов к осям силовых фазных обмоток 2 и 3. Поворот осей обмоток 23 и 24 встроенного датчика углового положения ротора относительно осей силовых фазных обмоток 2 и 3 синхронного элек- тродвигателя на 45 осуществлен с целью ослабления влияния на работу встроенного датчика положения ротора 25 магнитного потока реакции якоря, обусловленного токами силовых фазных обмоток 2 и 3, Степень этого влияния при таком взаимном расположении обмоток минимальна. Выходные сигналы блока разворота U и Ugp поступают на входы блока компенсации. С целью
дальнейшего уменьшения влияния магнитного потока на работу встроенного датчика положения ротора в блоке 21 компенсации осуществляется компенса-- : ция искажений, внесенных в сигналы
0
5
0
5
0
5
0
5
0
5
этого датчика магнитным потоком реакции якоря. Компенсация осуществля- :ется с использованием сигналов фазных датчиков 8 и 9, поскольку фазные составляющие потока реакции якоря пропорциональны токам силовых фазных обмоток 2 и 3, Выходные сигналы блока 21 компенсации с целью их фильтрации поступают на вторые входы фазных апериодических звеньев 12 и 13. На первые входы этих звеньев поступают выходные сигналы блока 14 выделения фазных ЭДС. В данном электроприводе с помощью фазных апериодических звеньев 12 и 13 осуществляется безынерционная фильтрация сигналов. Для этого на входе каждого апериодического звена производится сложение сигнала блока 21 компенсации, пропорционального соответствующему фазному потокосцеплению, с сигналом, соответствующим фазной ЭДС, являющейся производной фазного потокосцештения. Соотношения между этими сигналами и величина постоянной времени а перио- дического звена 12 (13) выбраны таким образом, чтобы была обеспечена хорошая фильтрация сигналов фазных апериодических звеньев 12, 13 и при этом в них не было внесено фазового запаздывания. Формирование сигналов фазных ЗДС в блоке 14 выделения фазных ЭДС производится методом IZ-ком- пенсации с использованием сигналов фазных датчиков 8 и 9 тока.
Выходные сигналы фазных апериодических звеньев подвергаются нормированию в блоке 22 нормирования, в котором формируются опорные гармонические функции sinpcsi, cospoi нормированной единичной амплитуды. Блок нормирования может работать, например, по принципу автоматической регулировки усиления его трактов прохождения сигналов. Выходные сигналы блока 22 нормирования поступают на входы опорных гармонических функций блока 10 прямого преобразования координат.
Таким образом, в предлагаемом электроприводе обеспечено высококачественное формирование опорных гармонических функций без применения на валу двигателя традиционных датчика углового положения и тахогенератора, что позволяет наряду с повьшением качества регулирования во всем диапазоне скоростей, включая нулевую.
расширить область применения электропривода.
Формула изобретения
I Электропривод, содержащий синхрон- ый электродвигатель, силовые фазные обмотки которого подключены к выходам усилителей тока с дЬтчиками фаз- яого тока в цепи обратной связи, вхо- которых подключены к выходам блока прямого преобразования координат, вход задания которого подключен к блоку задания, а входы опорных гармонических функций связаны с фазньми апериодическими звеньями, причем их первые входы подключены к выходам блока выделения фазных ЭДС, к входам
которого подключены фазные измеритель-.
яые обмотки синхронного электродвигателя, отличающийся тем, что, с целью расширения диапазона регулирования частоты вращения и повы- пения равномерности в области низких частот вршцения, в него введены источник переменного напряжения с выходной обмоткой, фазные фазированные зыпрямители с сигнальным и опорным входами, координатный преобразователь с фазными входами и выходами, блок компенсации с фазными сигнальными и компенсирующими входами и выходами, блок нормирования с фазными входами и выходами, блок вьщеления разных ЭДС снабжен компенсирующими 4 азными входами, а синхронный элект
5
0
5
родвигатель снабжен двумя соединенными между собой параллельно ортогональными обмотками определения углового положения ротора, сдвинутыми относительно фазных обмоток синхронного электродвигателя на угол , каждая ортогональная обмотка составлена из двух диаметрально расположенных и соединенных между собой полуобмоток, средние точки ортогональных обмоток подключены к сигнальным входам соответствующих фазных фазированных выпрямителей, к опорным входам которых подключена выходная обмотка источника переменного напряжения, подключенная к точкам соединения ортогональных обмоток определения углового положения ротора, выходы со- ответствунщих фазньпс фазированных выпрямителей подключены к фазным входам координатного преобразования, ,фазные выходы которого подключены к соответствующим фазным сигнальным входам блока компенсации, фазные выходы которого подключены к вторьш входам фазных апериодических звеньев, выходы которых подключены к соответствующим фазным входам блока нормирования, фазные выходы которого подключены к соответствукщим входам опорных гармонических функций блока прямого преобразования координат, а выходы фазных датчиков тока подключены к соответствующим фазным компенсирующим входам блока вьщеления фазных ЭДС и блока компенсации.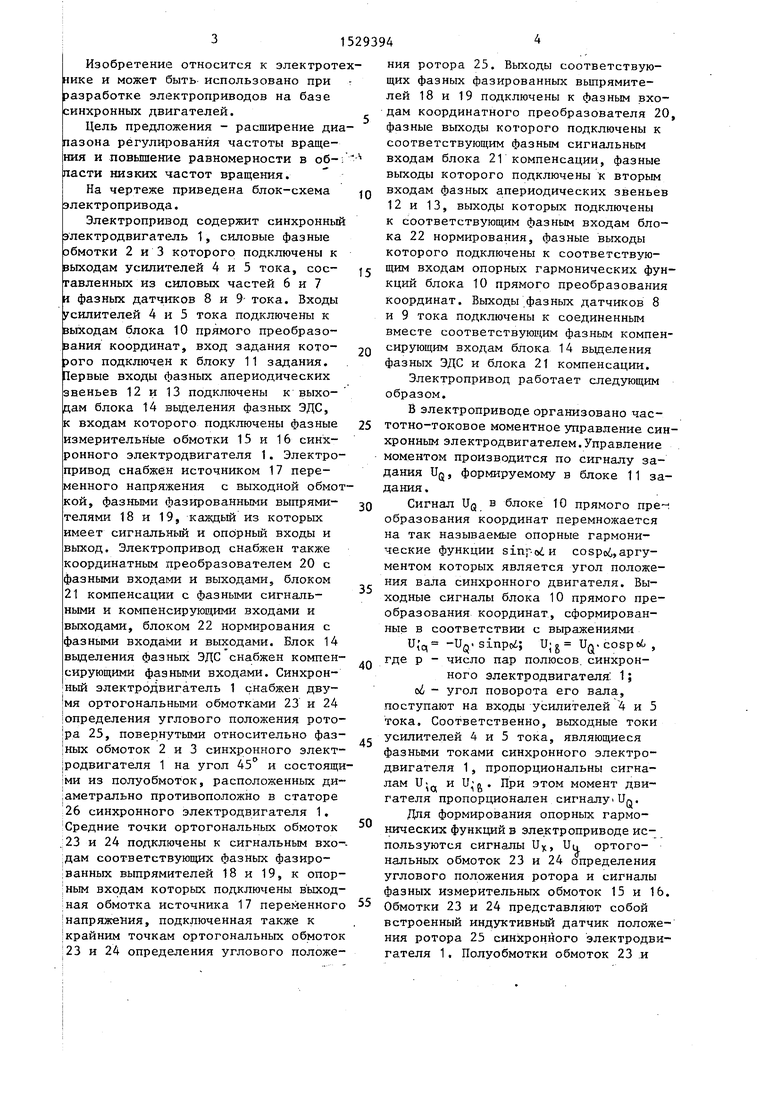
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2134481C1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Электропривод с асинхронной короткозамкнутой электрической машиной | 1978 |
|
SU765965A1 |
| Электропривод переменного тока | 1975 |
|
SU661705A1 |
| Электропривод переменного тока | 1981 |
|
SU1014117A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором (его варианты) | 1980 |
|
SU1100699A1 |
Изобретение относится к электротехнике и может быть использовано при разработке электропривода на базе синхронных двигателей. Цель изобретения - расширение диапазона регулирования частоты вращения и повышение равномерности в области низких частот. Электропривод содержит синхронный электродвигатель 1, силовые фазные обмотки которого подключены к усилителям тока 6, 7, входы которых подключены к выходам блока прямого преобразования координат 10. В электроприводе использован блок выделения ЭДС 14, а двигатель снабжен измерительными обмотками 15,16 и дополнительными ортогональными обмотками 23 и 24, которые подключены к фазным выпрямителям 18,19. В электроприводе осуществляется высококачественное формирование опорных сигналов, что обуславливает более точное определение положения ротора и формирование сигнала задания тока на низкой частоте вращения. В электроприводе обеспечивается высококачественное формирование опорных гармонических функций без использования датчика положения ротора и тахогенератора. 1 ил.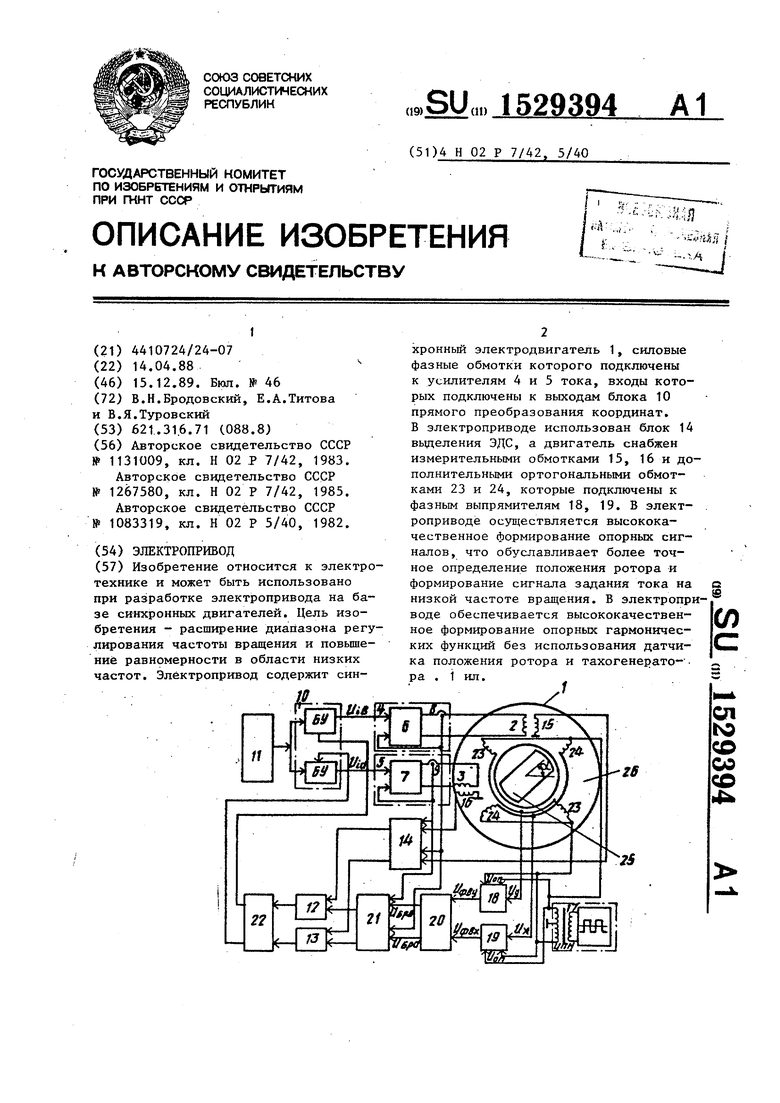
| Следящий электропривод | 1983 |
|
SU1131009A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1985 |
|
SU1267580A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
